Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo.
Procedimiento para la determinación pasiva de datos de un objetivo (R,
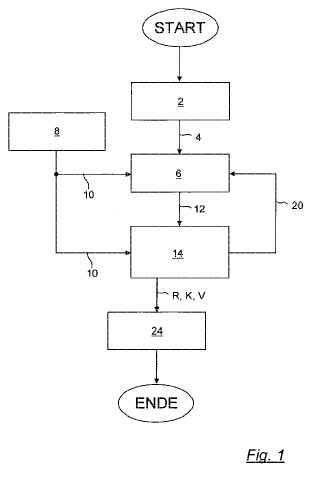
K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo del objetivo (K) y/o una velocidad del objetivo (V) a partir de ángulosde alineación (4) medidos a través de recepción selectiva de la dirección de ondas acústicas irradiadas o emitidaspor el objetivo, por medio de una disposición de registradores de sonido acuático de una instalación de recepciónsonar (2) y de ángulos de alineación estimados, que son determinados a partir de posiciones estimadas del objetivo,en el que por medio de al menos un procedimiento de optimización (6), designado a continuación comoprocedimiento CTMA, se reducen al mínimo iterativamente diferencias de ángulos de alineación a partir de losángulos de alineación (4) medidos y a partir de los ángulos de alineación estimados sobre varios ciclos deprocesamiento y una posición estimada del objetivo, que sirve de base para el mínimo, es determinada comosolución optimizada CTMA (12), a partir de la cual se determinan datos temporales del objetivo (R, K, V) y en el queel procedimiento CTMA (6) tiene en cuenta valores límites (10) predeterminados para los datos del objetivo (R, K, V)a determinar durante la optimización, caracterizado porque se realiza un tratamiento de errores (14)para la deteccióny corrección de valores límites erróneos (10), que presenta las siguientes etapas:
a) verificación de los valores límites (10) para determinar errores eventuales por medio de un módulo de verificaciónde la factibilidad (38), que lleva a cabo una verificación de la factibilidad para la detección de valores límiteserróneos, y
b) i) en el caso de que se detecte al menos un valor límite erróneo (10): modificar uno, varios o todos los valoreslímites (10) de acuerdo con reglas predeterminadas por medio de un módulo de corrección (40) yrealización de nuevo del procedimiento CTMA (6) y del tratamiento de errores (14) teniendo en cuenta losvalores límites (20) modificados para la determinación de nuevos datos temporales del objetivo (R, K, V) y
ii) en el caso de que no se detecte ningún valor límite erróneo (10): emitir la solución CTMA optimizada (12)del procedimiento CTMA (6) y/o emitir los datos del objetivo (R, K, V) aceptados como correctos,determinados a partir de la solución CTMA (12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10400031.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRÜCKER HEERSTRASSE 235 28309 BREMEN ALEMANIA.
Inventor/es: STEIMEL, ULRICH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/808 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
PDF original: ES-2400413_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo La invención se refiere a un procedimiento para la determinación pasiva de datos de un objetivo asociados a un objetivo desde ángulos de marcación medidos o estimados del tipo mencionado en el preámbulo de la reivindicación 1, a un dispositivo para la realización del procedimiento de acuerdo con la reivindicación 10 así como un programa de ordenador que dispone de medios adecuados de código de programa para la realización del procedimiento.
Para determinar sin reserva propia desde un vehículo de transporte, como ejemplo un buque de superficie o un submarino, la distancia, la velocidad y el rombo de un objetivo, por ejemplo de un buque de superficie, de un submarino o de un torpedo como datos del objetivo asociados a un objetivo, se reciben con una instalación de recepción sonar las ondas acústicas del ruido del objetivo y se miden ángulos de orientación con respecto al objetivo. A partir de estos ángulos de orientación se estima, en función de la posición propia del vehículo de transporte una posición del objetivo y se calcula un ángulo de orientación estimado correspondiente. Condición previa para ello es que el objetivo se mueva de una manera uniforme, es decir, no acelerado en un rombo constante.
Se conoce a partir del documento DE 34 46 658 C2 un procedimiento, que reduce iterativamente la diferencia entre ángulos de orientación medidas y estimados sobre varios ciclos de procesamiento hasta que no se alcanza un límite de error. En el caso de que no se alcance este límite de error, se reconoce la posición estimada que sirve de base como posición del objetivo. Los datos del objetivo que pertenecen a esta posición del objetivo están optimizados, por lo tanto, en función del procedimiento de iteración utilizado de acuerdo con un criterio de optimización predeterminado. Estos datos pertenecen a una solución optimizada, que es actualizada durante cada ciclo de procesamiento con cada nueva medición del ángulo de orientación. En condiciones uniformes, especialmente sin maniobra del objetivo o modificación de la propagación del sonido, la solución óptima se aproximará cada vez más, a medida que aumenta la duración de la observación, a la solución real, puesto que de acuerdo con el procedimiento de optimización utilizado y el escenario actual, la solución determinada en cada caso como mejor solución, es decir, la solución óptima converge más pronto o más tarde hacia la solución realmente correcta.
Un procedimiento de este tipo, llamado también Target Motion Analysis (TMA) , tiene, sin embargo, el inconveniente de que en virtud de interferencias desconocidas en las señales de recepción, la solución calculada puede ser poco realista. El procedimiento TMA, en el caso de datos de entrada muy erróneos, estima a veces datos poco realistas o ilógicos del objetivo, como por ejemplo una velocidad de 80 nudos o un rumbo saliente, aunque el objetivo se encuentren en un rumbo entrante.
El documento EP 1 531 339 A2 describe un procedimiento, en el que se predeterminan valores límite para los datos del objetivo, con lo que solamente se obtienen datos física y técnicamente razonables del objetivo a partir del proceso de estimación iterativa. Se excluyen desde el principio los resultados poco realistas o ilógicos, como por ejemplo una distancia de 1000 kilómetros, que pueden aparecer, en general, durante la iteración en el caso de señales de recepción muy ruidosas.
Un procedimiento de optimización de este tipo, en el que se tienen en cuenta valores límites para los datos del objetivo durante la optimización, se designa Constraint-TMA (CTMA) . Los valores límites son introducidos manualmente, por ejemplo, por un operador o, en cambio, son calculados a partir de las particularidades geográficas. Las previsiones ya aproximadas posibilitan que se excluyan estimaciones de posiciones del objetivo, que pueden ser detectadas como imposibles con la instalación de recepción sonar.
Sin embargo, el procedimiento CTMA conocido tiene el inconveniente de que su solución óptima no puede converger hacia la solución realmente óptima en el caso de valores límite seleccionados erróneamente. Puesto que la solución CTMA corresponde al mínimo global de un criterio de optimización dentro de los valores límites establecidos, ésta no proporciona la solución realmente correcta, cuando la solución real se encuentra fuera del espacio de solución establecido a través de los valores límite. De esta manera, en el caso de valores límites seleccionados erróneamente, el procedimiento TMA sencillo proporcionaría después de una fase de convergencia resultados más exactos que el procedimiento CTMA.
Por lo tanto, la invención tiene el problema de detectar y corregir los valores límites seleccionados erróneamente durante la utilización de un procedimiento de optimización para la determinación de datos del objetivo.
La invención soluciona este problema a través de las características de un procedimiento para la determinación pasiva de datos del objetivo de acuerdo con la reivindicación 1 así como con un dispositivo de acuerdo con la reivindicación 10.
Las señales de recepción de al menos una disposición de convertidor electroacústico y/u optoacústico, por ejemplo de una base de herradura o antena lateral a borde de un submarino como vehículo de transporte y/o de una antena colgante remolcada por un buque de superficie o un submarino son agrupadas en una instalación de recepción sonar de forma selectiva de la dirección en grupos de señales y se observan los niveles de los grupos de señales.
Una elevación del nivel indica que un objetivo se encuentra en un rayo de orientación de un ángulo de orientación asociado al grupo de señales.
Durante la marcha del vehículo de transporte sobre un tramo a lo largo de su rumbo se miden continuamente ángulos de orientación. El tramo designa en este caso aquel trayecto que ha recorrido el vehículo de transporte durante un periodo de tiempo predeterminado con rumbo constante. En ciclos de procesamiento sucesivos se procesan los ángulos de orientación medidos hacia el objetivo para obtener datos del objetivo. En este caso, se estima, respectivamente, por cada ciclo de procesamiento al menos un dado del objetivo, pero en particular un conjunto de datos del objetivo, como por ejemplo la distancia del objetivo, el rumbo del objetivo y/o la velocidad del objetivo.
Como procedimiento de optimización se aplica con preferencia el procedimiento CTMA, que tiene en cuenta valores límites establecidos previamente para la determinación de los datos del objetivo. En este caso se trata de un procedimiento de cálculo no recursivo, en el que se forman diferentes de ángulos de orientación a partir de los ángulos de orientación medidos y los ángulos de orientación estimados. La suma de estas diferencias de los ángulos de orientación eventualmente ponderadas o de los cuadrados de estas diferencias se reduce al mínimo entonces iterativamente. Cuando se alcanza un límite de error predeterminado, es decir, un valor mínimo predeterminado de la diferencia de los ángulos de orientación, se indica la solución optimizada por medio de componentes de vectores X0, Y0, VX, VY como la mejor solución. A partir de los componentes de la posición X0, Y0 y de los componentes de la velocidad VX, VY se pueden calcular datos actuales del objetivo para una distancia del objetivo, un rumbo del objetivo y/o una velocidad del objetivo. No obstante, la invención no está limitada al procedimiento CTMA. También son concebibles otros procedimientos de optimización, que calculan, a partir de los componentes-X-Y estimados, las posiciones para el objetivo y tienen en cuenta valores límites para los datos del objetivo durante la optimización.
Para poder excluir desde el principio datos irrealistas o ilógicos, que pueden resultar, por ejemplo, a través de señales de recepción muy ruidosas, se limita de manera conveniente el espacio de solución del procedimiento CTMA para los datos estimados del objetivo, estableciendo valores límites para los datos del objetivo. En este caso, a cada dato del objetivo se asigna, respectivamente, un valor límite máximo y un valor límite mínimo. Para una distancia del objetivo, un rumbo del objetivo y una velocidad del objetivo se establecen, por ejemplo, valores límites para una distancia mínima y máxima posible del objetivo, un rumbo entrante o saliente y valores para una velocidad mínima y máxima posible del objetivo. Estos valores dependen de las previsiones técnicas de la instalación sonar o del objetivo. De esta manera existen, por ejemplo, el valor límite para la distancia máxima con el alcance máximo... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, en particular una distancia del objetivo, un rumbo del objetivo (K) y/o una velocidad del objetivo (V) a partir de ángulos de alineación (4) medidos a través de recepción selectiva de la dirección de ondas acústicas irradiadas o emitidas por el objetivo, por medio de una disposición de registradores de sonido acuático de una instalación de recepción sonar (2) y de ángulos de alineación estimados, que son determinados a partir de posiciones estimadas del objetivo, en el que por medio de al menos un procedimiento de optimización (6) , designado a continuación como procedimiento CTMA, se reducen al mínimo iterativamente diferencias de ángulos de alineación a partir de los ángulos de alineación (4) medidos y a partir de los ángulos de alineación estimados sobre varios ciclos de procesamiento y una posición estimada del objetivo, que sirve de base para el mínimo, es determinada como solución optimizada CTMA (12) , a partir de la cual se determinan datos temporales del objetivo (R, K, V) y en el que el procedimiento CTMA (6) tiene en cuenta valores límites (10) predeterminados para los datos del objetivo (R, K, V) a determinar durante la optimización, caracterizado porque se realiza un tratamiento de errores (14) para la detección y corrección de valores límites erróneos (10) , que presenta las siguientes etapas:
a) verificación de los valores límites (10) para determinar errores eventuales por medio de un módulo de verificación de la factibilidad (38) , que lleva a cabo una verificación de la factibilidad para la detección de valores límites erróneos, y
b) i) en el caso de que se detecte al menos un valor límite erróneo (10) : modificar uno, varios o todos los valores límites (10) de acuerdo con reglas predeterminadas por medio de un módulo de corrección (40) y realización de nuevo del procedimiento CTMA (6) y del tratamiento de errores (14) teniendo en cuenta los valores límites (20) modificados para la determinación de nuevos datos temporales del objetivo (R, K, V) y
ii) en el caso de que no se detecte ningún valor límite erróneo (10) : emitir la solución CTMA optimizada (12) del procedimiento CTMA (6) y/o emitir los datos del objetivo (R, K, V) aceptados como correctos, determinados a partir de la solución CTMA (12) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el procedimiento presenta adicionalmente las siguientes etapas:
a) realización de otro procedimiento de optimización (26) , designado a continuación como procedimiento TMA, para la determinación de otros datos temporales del objetivo (RTMA, KTMA, VTMA) a partir una solución TMA optimizada (28) del procedimiento TMA (26) , en el que la posición estimada del objetivo, que sirve de base para el mínimo determinado por el procedimiento TMA (26) , se determina como la solución TMA optimizada (28) ,
b) comparación de estos datos temporales del objetivo (RTMA, KTMA, VTMA) con los valores límites (10) para la verificación de si los datos temporales del objetivo (RTMA, KTMA, VTMA) se encuentran dentro de un espacio de solución cubierto por los valores límites (10) , y
c) i) en el caso de que no se detecte ningún dato temporal del objetivo (RTMA, KTMA, VTMA) fuera del espacio de solución: emitir la solución TMA (28) y/o los datos del objetivo (R, K, V) aceptados como correctos,
determinados a partir de la solución TMA (28) , y
ii) en el caso de que se detecte al menos un dato temporal del objetivo (RTMA, KTMA, VTMA) fuera del espacio de solución: iniciar el procedimiento CTMA (8) y realizar el tratamiento de errores (14) para la detección y corrección de valores límites erróneos (10) .
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque se determina un instante de convergencia del procedimiento TMA (26) , en el que para el caso de que se ejecute el procedimiento CTMA (6) , hasta la consecución del instante de convergencia, se emiten la solución CTMA (12) del procedimiento CTMA (6) y/o los datos del objetivo (R, K, V) aceptados como correctos, determinados a partir de la solución CTMA (12) sin realización previa del tratamiento de errores (14) y después de alcanzar el instante de convergencia del procedimiento TMA (26) se realiza el tratamiento de errores (14) para la detección y corrección de valores límites erróneos (10) .
4. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque la solución CTMA (12) del procedimiento CTMA (6) y/o los datos del objetivo (R, K, V) aceptados como correctos, determinados a partir de la solución CTMA
(12) son emitidos visualmente hasta la consecución del instante de convergencia y son modificados los valores límites (10) por medio de una instalación de entrada (8) .
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque para la verificación de la factibilidad (38) para la detección de valores límites erróneos (10) se realiza una verificación de los residuos
(42) y/o una verificación de los cantos (44) .
6. Procedimiento de acuerdo con la reivindicación 5, caracterizado porque para la verificación de los residuos (42) se determina un factor residual (Q) , en el que el factor residual (Q) es determinado utilizando al menos dos procedimientos de optimización, en particular un procedimiento TMA (26) y un procedimiento CTMA (6) , a partir de las soluciones respectivas de los procedimientos de optimización, y el factor residual (Q) es comparado para la detección de valores límites erróneos (10) con al menos un valor umbral predeterminado.
7. Procedimiento de acuerdo con la reivindicación 5 ó 6, caracterizado porque para la verificación de los cantos (44) para la detección de valores límites erróneos (10) se comparan los valores límites (10) y/o una magnitud derivada de os valores límites (10) , en particular limitaciones de estado, con la solución CTMA (12) del procedimiento (6) y/o los datos temporales del objetivo (R, K, V) determinados a partir de la solución CTMA (12) .
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la corrección de los valores límites erróneos (10) por medio del módulo de corrección (40) presenta las etapas siguientes:
a) si se detecta o bien al menos un valor límite erróneo (10) o un valor límite modificado erróneo (20) , modificar uno, varios o todos los valores límites (10; 20) y/o un intervalo de valores límites correspondientes, que presentan el valor límite (10; 20) y realizar de nuevo el procedimiento CTMA (6) y el tratamiento de errores (14) en el ciclo de procesamiento actual teniendo en cuenta los valores límites modificados,
b) si se detecta de nuevo al menos un valor límite modificado erróneo (20) , repetir la etapa a) en el ciclo de procesamiento actual,
c) si se detecta de nuevo al menos un valor límite modificado erróneo (20) y/o después de realizar varias veces la etapa a) , realizar de nuevo el procedimiento CTMA (6) y el tratamiento de errores (14) en el ciclo de procesamiento actual teniendo en cuenta valores límites mínimos predeterminados o realizar de nuevo el procedimiento CTMA (6) y el tratamiento de errores (14) en el siguiente ciclo de procesamiento con ángulos de alineación (4) medidos de nuevo y teniendo en cuenta valores límites predeterminados (10) .
9. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se tiene en cuenta una maniobra del objetivo durante la realización del procedimiento TMA (6) , calculando el procedimiento CTMA (6) dos posiciones del objetivo, de manera que para la posición original del objetivo se tienen en cuenta los valores límites originales (10) y se establecen nuevos valores límites para la nueva posición del objetivo.
10. Dispositivo para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, en particular una distancia del objetivo, un rumbo del objetivo (K) y/o una velocidad del objetivo (V) a partir de ángulos de alineación (4) que se pueden medir a través de recepción selectiva de la dirección de ondas acústicas irradiadas o emitidas por el objetivo, con una disposición de registradores de sonido acuático de una instalación de recepción sonar (2) y de ángulos de alineación estimados, que pueden ser determinados a partir de posiciones estimadas del objetivo, en el que por medio de al menos un procedimiento de optimización (6) , designado a continuación como procedimiento CTMA, se reducen al mínimo iterativamente diferencias de ángulos de alineación a partir de los ángulos de alineación (4) medidos y a partir de los ángulos de alineación estimados sobre varios ciclos de procesamiento y una posición estimada del objetivo, que sirve de base para el mínimo, puede ser determinada como solución optimizada CTMA (12) , a partir de la cual se determinan datos temporales del objetivo (R, K, V) y en el que valores límites (10) predeterminados para los datos del objetivo (R, K, V) a determinar durante la optimización son tenidos en cuenta por medio del procedimiento CTMA (6) , en particular para la realización de un procedimiento de acuerdo con una de las reivindicaciones 1 a 9, caracterizado por una instalación de tratamiento de errores (14) , que está configurada para reconocer y corregir valores límites erróneos (10) , en el que la instalación de tratamiento de errores (14) presenta un módulo de verificación de la factibilidad (38) y un módulo de corrección (40) , por el módulo de verificación de la factibilidad (38) , que está configurado para reconocer valores límites erróneos (10) , por el módulo de corrección (40) , que está configurado para corregir valores límites erróneos (10) y por una unidad de salida (24) para la emisión de la solución CTMA optimizada (12) del procedimiento CTMA (6) y/o para la emisión de los datos del objetivo (R, K, V) aceptados como correctos, determinables a partir de la solución CTMA (12) , para el caso de que por medio del módulo de verificación de la factibilidad (38) no se puedan reconocer valores límites erróneos (10) .
11. Dispositivo de acuerdo con la reivindicación 10, caracterizado porque el módulo de verificación de la factibilidad
(38) presenta un módulo de verificación de residuos (42) y/o un módulo de verificación de los cantos (44) , en el que el módulo de verificación de residuos (42) y el módulo de verificación de los cantos (44) están configurados para reconocer valores límites erróneos.
12. Dispositivo de acuerdo con una de las reivindicaciones 10 a 11, caracterizado por una instalación de verificación (30) , que está configurada para verificar si datos temporales del objetivo (RTMA, KTMA, VTMA) , que se pueden determinar a partir de una solución optimizada (28) de otro procedimiento de optimización (26) , designado a continuación como procedimiento TMA, se encuentran dentro de un espacio de solución que puede ser cubierto por los valores límites (10) , de manera que la posición estimada del objetivo, que sirve de base pata el mínimo determinable por el procedimiento TMA, se puede determinar como solución TMA optimizada (28) .
13. Dispositivo de acuerdo con la reivindicación 12, caracterizado por un detector de fases de convergencia (78) , que está configurado para determinar un instante de convergencia del procedimiento TMA (26) .
14. Dispositivo de acuerdo con una de las reivindicaciones 10 a 13, caracterizado por medios para la realización de una, varias o todas las etapas del procedimiento de acuerdo con una de las reivindicaciones 1 a 9.
15. Programa de ordenador, que presenta medios de código de programa de ordenador, que son adecuados para la realización del procedimiento de acuerdo con una de las reivindicaciones 1 a 9, cuando se ejecuta el programa en un ordenador.
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo, del 12 de Febrero de 2014, de ATLAS ELEKTRONIK GMBH: Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos de marcación medidos en diferentes momentos, que […]
Procedimiento para generar rutas de localizador que jalonan la puntería, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, […]
Sistemas y métodos para desambiguar posiciones de un tirador, del 23 de Mayo de 2012, de Raytheon BBN Technologies Corp: Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicosseparados cuando una […]
MÉTODO PARA IDENTIFICAR UN REBUFO, del 2 de Marzo de 2012, de Raytheon BBN Technologies Corp: Un método para identificar una señal de rebufo dentro de una señal generada por una matriz de sensores acústicos que forman una antena, que comprende: definir […]
 SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETIVOS IRRADIADORES DE SONIDO., del 1 de Enero de 2006, de ATLAS ELEKTRONIK GMBH: Procedimiento para la localización pasiva de objetivos irradiadores de sonido mediante la determinación de un ángulo de marcación con respecto al objetivo y una distancia […]
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS, del 30 de Enero de 2012, de ATLAS ELEKTRONIK GMBH: Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el […]