PROCEDIMIENTO Y DISPOSITIVO PARA ACCIONAR MEDIOS DE PROTECCIÓN DE PERSONAS PARA UN VEHÍCULO EN CASO DE UN IMPACTO LATERAL.
La invención se refiere a un procedimiento y a un dispositivo para accionar medios de protección de personas para un vehículo (1) en caso de un impacto lateral,
captándose y evaluándose primeros datos (a1(90º-δ), a2(90º-δ)) de sensor de una primera dirección (90º-δ) de detección y segundos datos (a1δ, a2δ) de sensor de una segunda dirección (δ) de detección, disponiéndose la primera dirección (90º-δ) de detección y la segunda dirección (δ) de detección de manera perpendicular entre sí. Según la invención se determinan a partir de los primeros y segundos datos (a1(90º-δ), a2(90º-δ), a1δ, a2Y) de sensor captados primeras partes (a1-Y, a2Y) de señal en la dirección (Y) transversal del vehículo y segundas partes (a1X, a2X) de señal en la dirección (X) longitudinal del vehículo, identificándose un impacto lateral cuando las primeras partes (a1-Y, a2Y) de señal determinadas en la dirección (Y) transversal del vehículo superan un valor umbral previamente establecido, comparándose para la clasificación del impacto lateral adicionalmente las segundas partes (a1X, a2X) de señal en la dirección (X) longitudinal del vehículo con al menos un valor umbral previamente establecido, y activándose un algoritmo de disparo para los medios de protección de personas en función de la clasificación del impacto lateral con parámetros previamente establecidos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231806.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: LANG, GUNTHER, RECKZIEGEL,Bastian.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/0136 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a un contacto efectivo con un obstáculo.
Fragmento de la descripción:
Procedimiento y dispositivo para accionar medios de protección de personas para un vehículo en caso de un impacto lateral
Estado de la técnica La invención parte de un procedimiento para accionar medios de protección de personas para un vehículo en caso de un impacto lateral según el género de la reivindicación 1 independiente así como de un dispositivo para accionar medios de protección de personas para un vehículo en caso de un impacto lateral según el género de la reivindicación 9 independiente.
En los sistemas de sensor de la seguridad pasiva empleados actualmente existen sistemas cuyos algoritmos para la detección de colisión frontal o impacto frontal se basan en señales de sensores basados en aceleración de la estructura lateral del vehículo que detectan o captan aceleraciones actuales en la dirección X e Y. Para detectar una colisión lateral o un impacto lateral se recurre a sensores de aceleración que detectan o captan una aceleración actual en la dirección Y así como a sensores de presión.
En la solicitud de patente europea EP 2 058 179 A2 se describen un procedimiento y un dispositivo de control para accionar medios de protección de personas en caso de un impacto lateral de un vehículo. El accionamiento se realiza en función de una determinación de tipo de colisión, determinándose el tipo de colisión mediante al menos dos señales de sensores integrados en diferentes posiciones. La determinación se realiza en función de al menos una diferencia de las al menos dos señales.
En la publicación para información de solicitud de patente DE 10 2006 008 638 A1 se describen un procedimiento y un dispositivo para la clasificación de accidentes para un vehículo. A este respecto se captan y evalúan primeros datos de sensor con respecto a una primera dirección de detección, preferiblemente la dirección longitudinal del vehículo, y segundos datos de sensor con respecto a una segunda dirección de detección, preferiblemente la dirección transversal del vehículo. Con los primeros y segundos datos de sensor detectados tras un impacto se realiza un análisis de correlación para determinar una magnitud característica que se asocia a una dirección de impacto con respecto a la primera dirección de detección. A este respecto una correlación muy débil de los primeros y segundos datos de sensor indica una dirección de impacto que corresponde a la primera dirección de detección o a la segunda dirección de detección, y una correlación muy fuerte entre los primeros y segundos datos de sensor indica una dirección de impacto entre la primera dirección de detección y la segunda dirección de detección. El procedimiento para la clasificación de accidentes realiza una determinación de la dirección de impacto, de modo que el comportamiento de disparo de dispositivos de protección de ocupantes del vehículo tales como el tensor de cinturón, el airbag, el airbag de cabeza, y la barra antivuelco puede adaptarse individualmente a una situación actual de accidente para garantizar una protección óptima para los ocupantes del vehículo también en caso de un impacto en ángulo y de este modo reducir el riesgo de lesiones para los ocupantes del vehículo. Así, por ejemplo en caso de un impacto en un intervalo de direcciones previamente establecido puede dispararse tanto un airbag lateral afectado como un airbag frontal, o en otros intervalos de direcciones puede realizarse un denominado bloqueo lateral frontal, es decir, en estos otros intervalos de direcciones se dispara por ejemplo sólo el airbag lateral o sólo el airbag frontal.
Exposición de la invención La unidad de sensor según la invención para un vehículo según las características de la reivindicación 1 independiente tiene a este respecto la ventaja de que la evaluación de datos de sensor detectados en dos direcciones de detección, tales como por ejemplo señales de aceleración, se utilizan para la clasificación de colisiones laterales o impactos laterales con partes de colisión o partes de impacto en la dirección transversal del vehículo y la dirección longitudinal del vehículo, estando dispuestas las dos direcciones de detección de manera perpendicular entre sí. El uso adicional de datos de sensor detectados en la dirección longitudinal del vehículo de sensores periféricos permite una mejora de la detección de colisiones laterales que presentan una componente principal en la dirección transversal del vehículo y una componente adicional en la dirección longitudinal del vehículo. Así, por ejemplo pueden detectarse y clasificarse mejor colisiones laterales contra poste según la norma FMVSS214 o barreras laterales en un desplazamiento lateral según la norma LINCAP. Así, colisiones laterales con una componente de colisión adicional en la dirección longitudinal del vehículo presentan una señal más elevada en el sensor o canal de sensor orientado en la dirección longitudinal del vehículo que colisiones laterales puramente de 90°. Esta información puede utilizarse de diferentes maneras para mejorar la capacidad de accionamiento de medios de protección de personas.
Mediante la combinación de las dos direcciones de detección o direcciones de captación puede crearse de manera ventajosa la posibilidad de un disparo de medios de protección de personas más temprano, más preciso y dependiente de la situación. Además una disposición de sensores de este tipo permite también una combinación de las dos señales para disparar medios de protección de personas. Así, un algoritmo de disparo para los medios de protección de personas puede basarse fundamentalmente en señales de sensor o datos de sensor captados o determinados en la dirección transversal del vehículo, y una función de plausibilidad puede
basarse fundamentalmente en señales de sensor o datos de sensor captados o determinados en la dirección longitudinal del vehículo. Con ello de manera ventajosa pueden tomarse decisiones de disparo de forma considerablemente más temprana que en un sistema convencional en el que para la función de plausibilidad se utiliza un sensor más alejado espacialmente que está dispuesto por ejemplo en un dispositivo de control central y hasta varios milisegundos (ms) tras el disparo del sensor no mide una señal lo suficientemente grande para la evaluación. De este modo la evaluación de datos de sensor de sensores periféricos, captados en dos direcciones diferentes mejora la capacidad de disparo y aumenta el número de escenarios de colisión pretendidos. Además, la evaluación de datos de sensor o señales de sensor captados en dos direcciones diferentes permite una mejora de una reacción dependiente del tipo de colisión en caso de colisiones laterales o impactos laterales.
La decisión de disparo o detección de tipo de colisión puede realizarse tanto mediante un umbral independiente de características que se basan en los datos de sensor o señales de sensor captados o determinados en la dirección longitudinal del vehículo, como mediante una combinación adecuada de los datos de sensor o señales de sensor captados o determinados en ambas direcciones de detección o direcciones de captura. Además, valores umbral para características de colisión que radican en componentes que se basan en datos de sensor o señales de sensor captados en la dirección transversal del vehículo pueden adaptarse mediante componentes que se basan en datos de sensor o señales de sensor captados o determinados en la dirección longitudinal del vehículo.
Formas de realización de la presente invención proporcionan un procedimiento para accionar medios de protección de personas para un vehículo en caso de un impacto lateral, captándose y evaluándose primeros datos de sensor de una primera dirección de detección y segundos datos de sensor de una segunda dirección de detección, y disponiéndose la primera dirección de detección y la segunda dirección de detección de manera perpendicular entre sí. Según la invención a partir de los primeros y segundos datos de sensor captados se determinan primeras partes de señal en la dirección transversal del vehículo y segundas partes de señal en la dirección longitudinal del vehículo, identificándose un impacto lateral cuando las primeras partes de señal determinadas en la dirección transversal del vehículo superan un valor umbral previamente establecido, comparándose para la clasificación del impacto lateral adicionalmente las segundas partes de señal en la dirección longitudinal del vehículo con al menos un valor umbral previamente establecido, y activándose un algoritmo de disparo para los medios de protección de personas en función de la clasificación del impacto lateral con parámetros previamente establecidos.
Un dispositivo según la invención...
Reivindicaciones:
1. Procedimiento para accionar medios de protección de personas para un vehículo en caso de un impacto lateral, captándose y evaluándose primeros datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) ) de sensor de una primera dirección (y, (90°-5) ) de detección y segundos datos (SX, S1X, S2X, a15, a25) de sensor de una segunda dirección (x, 5) de detección, disponiéndose la primera dirección (y, (90°-5) ) de detección y la segunda dirección (x, 5) de detección de manera perpendicular entre sí, caracterizado porque a partir de los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados se determinan primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal en la dirección (Y) transversal del vehículo y segundas partes (SX, S1Y, S2Y, a1X, a2X) de señal en la dirección (X) longitudinal del vehículo, identificándose un impacto lateral cuando las primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal en la dirección (Y) transversal del vehículo superan un valor umbral predeterminado, comparándose para la clasificación del impacto lateral adicionalmente las segundas partes (SX, S1X, S2X, a1X, a2X) de señal en la dirección (X) longitudinal del vehículo con al menos un valor umbral predeterminado, y activándose un algoritmo de disparo para los medios (42, 44) de protección de personas en función de la clasificación del impacto lateral con parámetros predeterminados.
2. Procedimiento según la reivindicación 1, caracterizado porque en el algoritmo de disparo correspondiente para los medios (42, 44) de protección de personas se modifica la magnitud del valor umbral para las primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal determinadas en la dirección (Y) transversal del vehículo en función de las segundas partes (SX, S1X, S2X, a1X, a2X) de señal determinadas en la dirección (X) longitudinal del vehículo.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados comprenden señales de aceleración que en la evaluación se utilizan como valores en bruto y/o como valores medios calculados a partir de los valores individuales y/o como valores individuales filtrados y/o como valores medios calculados a partir de los valores individuales filtrados.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque a partir de los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados se determinan mediante un análisis de señal y/u operaciones matemáticas amplitudes de señal y/o energías de oscilación y/o integrales y/o integrales de ventana y/o sumas y/o diferencias que se comparan entre sí en la evaluación.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque para la clasificación del impacto lateral a partir de los primeros y segundos datos (SY, SX, ) de sensor captados se determina una señal (Sa) resultante en una dirección (a) previamente establecida de manera fija que se utiliza como señal de entrada para el algoritmo de disparo de los medios (42, 44) de protección de personas, y correspondiendo la dirección (a) previamente establecida de manera fija a un ángulo en el intervalo de 45° a 90°, preferiblemente a un ángulo de 75° con respecto al eje (X) longitudinal del vehículo.
6. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque para la clasificación del impacto lateral a partir de los primeros y segundos datos (S1Y, S2Y, S1X, S2X) de sensor captados se determina de forma dinámica durante el impacto lateral una dirección (ß1, ß2) de impacto resultante y una señal (Sß1, Sß2) de impacto resultante.
7. Procedimiento según la reivindicación 6, caracterizado porque la señal (Sß1, Sß2) de impacto resultante determinada y/o los primeros y segundos datos (S1Y, S2Y, S1X, S2X) de sensor captados se utilizan como señal de entrada para el algoritmo de disparo de los medios (42, 44) de protección de personas.
8. Procedimiento según la reivindicación 7, caracterizado porque la magnitud de al menos un valor umbral de un algoritmo de disparo correspondiente para los medios (42, 44) de protección de personas varía en función de la dirección (ß1, ß2) de impacto resultante determinada.
9. Dispositivo para accionar medios de protección de personas para un vehículo en caso de un impacto lateral, en particular para realizar el procedimiento según una de las reivindicaciones 1 a 8, con al menos una unidad (14, 22, 24, 32, 34) de sensor para captar primeros datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) ) de sensor de una primera dirección (y, (90°-5) ) de detección y segundos datos (SX, S1X, S2X, a15, a25) de sensor de una segunda dirección (x, 5) de detección y una unidad (12) de evaluación y control para evaluar los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados, estando dispuestas la primera dirección (y, (90°-5) ) de detección y la segunda dirección (x, 5) de detección de manera perpendicular entre sí, caracterizado porque la unidad (12) de evaluación y control determina a partir de los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal en la dirección (Y) transversal del vehículo y segundas partes (SX, S1X, S2X, a1X, a2X) de señal en la dirección (X) longitudinal del vehículo, identificando la unidad (12) de evaluación y control un impacto lateral cuando las primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal determinadas en la dirección (Y) transversal del vehículo superan un valor umbral previamente establecido, y comparando la unidad (12) de evaluación y control para la clasificación del impacto lateral adicionalmente las segundas partes (SX, S1X, S2X, a1X, a2X) de señal en la dirección (X) longitudinal del vehículo con al menos un valor umbral previamente establecido y activando un
algoritmo de disparo para los medios (42, 44) de protección de personas en función de la clasificación del impacto lateral con parámetros previamente establecidos.
10. Dispositivo según la reivindicación 9, caracterizado porque la al menos una unidad (14, 22, 24, 32, 34) de sensor está configurada como sensor de aceleración que capta los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor como señales de aceleración que utiliza la unidad (12) de evaluación y control como valores en bruto individuales y/o como valores medios calculados a partir de los valores individuales y/o como valores individuales filtrados y/o como valores medios calculados a partir de los valores individuales filtrados, determinando y comparando entre sí la unidad (12) de evaluación y control a partir de los primeros y segundos datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) , SX, S1X, S2X, a15, a25) de sensor captados mediante un análisis de señal y/u operaciones matemáticas amplitudes de señal y/o energías de oscilación y/o integrales y/o integrales de ventana y/o sumas y/o diferencias.
11. Dispositivo según la reivindicación 9 ó 10, caracterizado porque al menos una unidad (22, 24) de sensor capta tanto los primeros datos (SY, S1Y, S2Y, a1 (90°-5) , a2 (90°-5) ) de sensor de la primera dirección (y, (90°-5) ) de detección como los segundos datos (SX, S1X, S2X, a15, a25) de sensor de la segunda dirección (X, 5) de detección.
12. Dispositivo según la reivindicación 11, caracterizado porque la al menos una unidad (22, 24) de sensor está dispuesta de tal manera en el vehículo que la primera dirección (y) de detección coincide con una dirección (Y) transversal del vehículo y la segunda dirección (x) de detección coincide con una dirección (X) longitudinal del vehículo.
13. Dispositivo según una de las reivindicaciones 9 a 12, caracterizado porque las primeras partes (SY, S1Y, S2Y, a1-Y, a2Y) de señal determinadas en la dirección (Y) transversal del vehículo pueden evaluarse para tomar una decisión de disparo para los medios de protección de personas y las segundas partes (SX, S1X, S2X, a1X, a2X) de señal determinadas en la dirección (X) longitudinal del vehículo pueden evaluarse para una decisión de plausibilización.
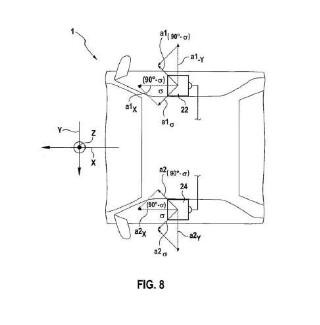
14. Dispositivo según la reivindicación 11, caracterizado porque la al menos una unidad (22, 24) de sensor está dispuesta de tal manera en el vehículo que la primera dirección de detección presenta un primer ángulo (90°-5) previamente establecido con respecto a la dirección (X) longitudinal del vehículo y la segunda dirección (x) de detección presenta un segundo ángulo (5) previamente establecido con respecto a la dirección (X) longitudinal del vehículo.
15. Dispositivo según la dirección 14, caracterizado porque la unidad (12) de evaluación y control utiliza los primeros y segundos datos (a1 (90°-5) , a2 (90°-5) , a15, a25) de sensor medidos como parámetros de entrada para una función de plausibilización, determinando la unidad (12) de evaluación y control las primeras partes (a1-Y, a2Y) de señal en la dirección (Y) transversal del vehículo mediante una transformación de coordenadas a partir de los primeros y segundos datos (a1 (90°-5) , a2 (90°-5) , a15, a25) de sensor medidos y determinando las segundas partes (a1X, a2X) de señal en la dirección (X) longitudinal del vehículo también mediante una transformación de coordenadas a partir de los primeros y segundos datos (a1 (90°-5) , a2 (90°-5) , a15, a25) de sensor.
Patentes similares o relacionadas:
Detección y respuesta a una explosión local a un vehículo, del 1 de Julio de 2019, de Advanced Blast & Ballistic Systems Limited: Vehículo , que comprende: una disposición de detectores que comprende una pluralidad de detectores (100; 100a-100d), distribuidos a lo largo de una longitud […]
EQUIPO DE SEGURIDAD PASIVA PARA PILOTOS DE VEHICULOS MOTORIZADOS SIN TECHO., del 21 de Mayo de 2019, de MAGURNO & LAUSUCH TECHNOLOGIES, S.L: Equipo de seguridad pasiva para vehículos motorizados sin techo, que comprende un asiento eyector en dicho vehículo y, al menos, un sensor […]
Procedimiento para hacer funcionar un sistema de protección de peatones, del 24 de Mayo de 2017, de AUDI AG: Procedimiento para hacer funcionar un sistema de protección de peatones para reducir la gravedad en accidentes en caso de colisiones frontales […]
Sensor de impacto con tubo flexible elásticamente deformable y sensor de presión y abertura radial en el tubo flexible para la sujeción, del 20 de Abril de 2016, de CONTINENTAL AUTOMOTIVE GMBH: Sensor de impacto integrado por un tubo flexible elásticamente deformable en caso de impacto , con un espacio hueco y por lo menos un sensor […]
Automóvil con sensor de deformación capacitivo para la detección de colisiones, del 29 de Abril de 2015, de AUDI AG: Automóvil que comprende un componente metálico previsto en la parte frontal, la parte trasera y/o lateralmente, en particular un parachoques, así como al menos un dispositivo […]
DISPOSITIVO PARA DETECTAR IMPACTOS, del 10 de Agosto de 2011, de ROBERT BOSCH GMBH: Dispositivo para detectar impactos con al menos un sensor de presión (1 a 5), en donde un procesador puede unirse al menos a un sensor de presión (1 a 5), de tal modo […]
 DISPOSITIVO Y PROCEDIMIENTO PARA LA ACTIVACIÓN DE UN MEDIO DE PROTECCIÓN DE PERSONAS, del 1 de Marzo de 2011, de ROBERT BOSCH GMBH: Dispositivo para la activación de medios de protección de personas (PS) con un circuito de evaluación (µC) que, en función de una primera señal de una […]
DISPOSITIVO Y PROCEDIMIENTO PARA LA ACTIVACIÓN DE UN MEDIO DE PROTECCIÓN DE PERSONAS, del 1 de Marzo de 2011, de ROBERT BOSCH GMBH: Dispositivo para la activación de medios de protección de personas (PS) con un circuito de evaluación (µC) que, en función de una primera señal de una […]
SENSOR DE ACCIDENTE Y MÉTODO PARA EL PROCESAMIENTO DE, AL MENOS, UNA SEÑAL DE MEDICIÓN, del 17 de Agosto de 2011, de ROBERT BOSCH GMBH: Sensor de accidente (S1) con - un elemento sensor (SE) para la deteccion de, al menos, una variable de medicion, y - una unidad logica (AS), caracterizada - por una primera […]