PROCEDIMIENTO PARA DETERMINAR LA DISTANCIA ENTRE UN VEHÍCULO Y UNA RADIOBALIZA Y RADIOBALIZA PARA ESTE PROCEDIMIENTO.
Procedimiento para determinar la distancia (a) entre un vehículo (12),
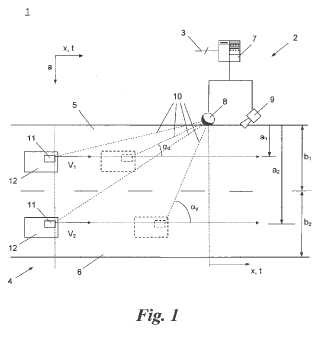
que pasa por una radiobaliza (2) de un sistema de peaje viario (1), y esta radiobaliza (2), estando equipado el vehículo (12) con un aparato de vehículo (11) que emite una señal (10) con una curva conocida de su frecuencia (fs) en función del tiempo, caracterizado por los siguientes pasos:
recibir la señal (fB) en la radiobaliza (2) durante el paso del vehículo (12) y grabar la curva (13, 14) de su frecuencia (fB) en función del tiempo relativa a la curva conocida en función del tiempo;
detectar un cambio (17) en la curva de frecuencia grabada (13, 14) que supere un primer valor umbral predefinido (σ);
localizar dos zonas alejadas (15, 16) en la curva de frecuencia (13, 14) que estén situadas temporalmente antes y después del cambio detectado (17) y que indiquen un cambio de frecuencia (fB') por debajo de un segundo valor umbral (ε);
escalar la curva de frecuencia grabada (13, 14) de manera que las zonas alejadas (15, 16) asuman valores predefinidos (±Δf); y determinar dicha distancia (a) a partir de la pendiente (fB') de la curva de frecuencia escalada (13', 14') en un punto de inflexión (20) de la misma.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10450189.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan el efecto Doppler.
- G07B15/06 G […] › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › G07B 15/00 Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00). › Disposiciones para tarificación vial o peaje urbano de vehículos o usuarios de vehículos, p. ej. sistema automático de peaje.
- G08G1/01 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Detección del movimiento del tráfico para el cómputo o el control (G08G 1/07 - G08G 1/14 take precedence; tarificación vial o tarifa por congestión de vehículos o usuarios de vehículos G07B 15/06).
PDF original: ES-2411692_T3.pdf
Fragmento de la descripción:
Procedimiento para determinar la distancia entre un vehículo y una radiobaliza y radiobaliza para este procedimiento.
La presente invención se refiere a un procedimiento para determinar la distancia entre un vehículo, que pasa por una radiobaliza de un sistema de peaje viario, y esta radiobaliza, estando equipado el vehículo con un aparato de vehículo que emite una señal con una curva conocida de su frecuencia en función del tiempo. La invención se refiere además a una radiobaliza para implementar un procedimiento de este tipo.
En los sistemas de peaje viario basados en el uso de radiobalizas, por ejemplo, según el estándar DSRC (dedicated short range communication, comunicación dedicada de corto alcance) o el estándar WAVE (wireless access in a vehicle environment, conexión inalámbrica en un entorno vehicular) , los aparatos de vehículo transportados por los vehículos (onboard units, OBUs, unidades de a bordo) se comunican a través de una radio de corto alcance con radiobalizas repartidas geográficamente tan pronto los vehículos pasan por estas radiobalizas. La comunicación vía radio sirve generalmente para localizar el vehículo en la zona de cobertura de radio de la radiobaliza con el fin de aplicar el cobro de tasas correspondientes al uso del lugar, o simplemente también sólo para depositar datos de peaje, generados por el OBU, en las radiobalizas durante su recorrido.
A menudo se desea determinar la distancia a la que un vehículo pasa por una radiobaliza, por ejemplo, para sancionar infracciones de peaje, en el caso de carreteras de varios carriles: Si varios vehículos situados uno al lado de otro en distintos carriles pasan por una radiobaliza y una de sus comunicaciones vía radio indica una infracción de peaje, por ejemplo, un cobro de tasa de peaje fallido, un estado de cuenta insuficiente de una cuenta de compensación, un OBU defectuoso o mal ajustado, etc., o se debe calcular un importe de tasas o peaje en función del carril (carril para vehículos con múltiples pasajeros) , resulta decisivo entonces conocer cuál de los vehículos, que circulan uno al lado de otro, es responsable de lo anterior para poder identificarlo, por ejemplo, visualmente in situ o en una prueba fotográfica del tramo de carretera de la baliza.
En la actualidad son conocidos distintos procedimientos para determinar la distancia. Una solución consiste en usar en la radiobaliza varias antenas receptoras, situadas en diferentes lugares, para determinar las posiciones de los OBUs en el campo de recepción de radio a partir de las mediciones de diferencia de fase entre las señales de OBU captadas por las antenas individuales. Del documento US5, 790, 052 es conocida otra solución que se basa en las mediciones Doppler de las diferentes velocidades relativas de un OBU respecto a las antenas receptoras, situadas en diferentes lugares, de una radiobaliza para determinar a partir de la relación de los valores de medición de velocidad la relación de las distancias respecto a ambas antenas receptoras. Por último, sería posible también usar una radiobaliza por separado con una zona de cobertura de radio pequeña para cada carril. Todas estas soluciones conocidas son costosas, entre otras cosas porque se basan en varias antenas receptoras.
La invención tiene el objetivo de crear un procedimiento para determinar la distancia entre un OBU y una radiobaliza en un sistema de peaje viario que necesite un coste de equipamiento menor para la implementación en comparación con las soluciones conocidas.
Este objetivo se consigue en un primer aspecto de la invención con un procedimiento del tipo mencionado al inicio que se caracteriza por los siguientes pasos:
recibir la señal en la radiobaliza durante el paso del vehículo y grabar la curva de su frecuencia en función del tiempo relativa a la curva conocida en función del tiempo; detectar un cambio en la curva de frecuencia grabada que supere un valor umbral predefinido; localizar dos zonas alejadas en la curva de frecuencia que estén situadas temporalmente antes y después del cambio detectado y que indiquen un cambio de frecuencia por debajo de un valor umbral; escalar la curva de frecuencia grabada de manera que las zonas alejadas asuman valores predefinidos; y determinar la distancia mencionada a partir de la pendiente de la curva de frecuencia escalada en un punto de inflexión de la misma.
La invención aprovecha el hecho de que el cambio de frecuencia, condicionado por el efecto Doppler, de la señal del OBU en el momento del paso directo, cuando la distancia es mínima, es inversamente proporcional a la distancia normal respecto a la radiobaliza, siempre que la curva de frecuencia se normalice a la velocidad propia del vehículo. Esto último se logra mediante la evaluación de la curva de frecuencia en “zonas alejadas”: En estas zonas alejadas, la distancia del vehículo es muy grande en comparación con la distancia normal, y ésta es insignificante, de manera que la magnitud del desplazamiento Doppler depende aquí esencialmente sólo de la velocidad propia y ésta se puede determinar a partir de esto. Mediante el análisis de la curva de frecuencia compensada según la velocidad
propia en la zona cercana a la baliza, en la que se produce el cambio máximo (“salto Doppler”) de la curva de frecuencia en su punto de inflexión, se puede determinar a continuación la dependencia de la distancia normal e incluso determinar esta distancia. Por consiguiente, con un único receptor y una única antena se puede determinar la distancia de paso sólo a partir de la comunicación vía radio entre el OBU y la radiobaliza.
La invención es adecuada para aparatos de vehículo con cualquier tipo de curvas conocidas de su frecuencia de emisión en función del tiempo, ya sean aparatos que emitan una frecuencia constante, por ejemplo, una frecuencia portadora constante, en cuyo caso la curva conocida en función del tiempo es simplemente “constante”, o aparatos que emitan frecuencias que varían en el procedimiento de saltos de frecuencia y cuya curva de variación de frecuencia es conocida, de manera que la curva de frecuencia, recibida en la radiobaliza, se puede normalizar a la curva de frecuencia de emisión conocida o referenciar.
A partir de la distancia determinada se determina a continuación preferentemente el carril de una carretera de varios carriles, en el que se mueve el vehículo. Esto permite asignar de manera unívoca las infracciones de peaje a un carril y al vehículo o a los vehículos situados en el carril en caso de vehículos que pasan en paralelo.
Según una primera realización ventajosa de la invención, el punto de inflexión se determina mediante la localización de aquel punto en la curva de frecuencia, en el que la frecuencia tiene un valor predefinido que es en particular la frecuencia nominal o frecuencia de reposo del OBU. Por tanto, esta realización es adecuada para aquellos casos, en los que se conoce previamente la frecuencia nominal de la comunicación vía radio del OBU.
Según una realización alternativa preferida de la invención, el punto de inflexión se determina mediante la localización de aquel punto en la curva de frecuencia, en el que la frecuencia corresponde al valor promedio de frecuencia de las zonas alejadas. En esta realización no es necesario conocer la frecuencia nominal del OBU. El procedimiento se adapta automáticamente a esto.
El desplazamiento Doppler, evaluado con el procedimiento de la invención, se puede medir en cualquier frecuencia de la señal, ya sea una frecuencia portadora o preferentemente una frecuencia de modulación de la misma. Por frecuencia de modulación se entiende una frecuencia de cualquier modulación de la señal del OBU, ya sea una modulación de frecuencia o de amplitud simple, una de las frecuencias de modulación de una modulación OFDM (multiplexación por división de frecuencias ortogonales) o también una modulación por impulsos o burst, como la que se produce debido a la transmisión periódica de bloques de datos completos; tal tasa de repetición de bloque se puede considerar también como frecuencia de modulación y es posible medir su desplazamiento de frecuencia Doppler.
El procedimiento de la invención es adecuado para todos los tipos de sistemas de peaje viario basados en el uso de radiobalizas. El procedimiento es adecuado en particular para sistemas de peaje viario DSRC y WAVE, en los que se usa un emisor DSRC o WAVE del aparato de vehículo para emitir la señal. Asimismo, son posibles otras realizaciones con la tecnología RFID (identificación por radiofrecuencia) , pero también cualquier tecnología móvil (por ejemplo, GSM, UMTS, LTE) y cualquier tecnología inalámbrica de corto alcance... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la distancia (a) entre un vehículo (12) , que pasa por una radiobaliza (2) de un sistema de peaje viario (1) , y esta radiobaliza (2) , estando equipado el vehículo (12) con un aparato de vehículo (11) que emite una señal (10) con una curva conocida de su frecuencia (fs) en función del tiempo, caracterizado por los siguientes pasos:
recibir la señal (fB) en la radiobaliza (2) durante el paso del vehículo (12) y grabar la curva (13, 14) de su frecuencia (fB) en función del tiempo relativa a la curva conocida en función del tiempo; detectar un cambio (17) en la curva de frecuencia grabada (13, 14) que supere un primer valor umbral predefinido (c) ; localizar dos zonas alejadas (15, 16) en la curva de frecuencia (13, 14) que estén situadas temporalmente antes y después del cambio detectado (17) y que indiquen un cambio de frecuencia (fB’) por debajo de un segundo valor umbral (s) ; escalar la curva de frecuencia grabada (13, 14) de manera que las zonas alejadas (15, 16) asuman valores predefinidos (±Mf) ; y determinar dicha distancia (a) a partir de la pendiente (fB’) de la curva de frecuencia escalada (13’, 14’) en un punto de inflexión (20) de la misma.
2. Procedimiento según la reivindicación 1, caracterizado porque a partir de la distancia (a) se determina el carril (5, 6) , de una carretera de varios carriles (4) , en el que se mueve el vehículo (12) .
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque el punto de inflexión (20) se determina localizando el punto de la curva de frecuencia (13, 14, 13’, 14’) en el que la frecuencia (fB) tiene un valor predefinido.
4. Procedimiento según la reivindicación 1 ó 2, caracterizado porque el punto de inflexión (20) se determina localizando el punto de la curva de frecuencia (13, 14, 13’, 14’) en el que la frecuencia (fB) corresponde al valor promedio de frecuencia de las zonas alejadas (15, 16) .
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque la señal (10) es transmitida por el aparato de vehículo (11) como al menos una frecuencia portadora modulada con una frecuencia de modulación, siendo la frecuencia mencionada (fB) la frecuencia de modulación.
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado porque para la transmisión de la señal
(10) se usa un emisor DSRC o WAVE del aparato de vehículo (11) .
7. Radiobaliza (2) para un sistema de peaje viario (1) para determinar la distancia (a) de un vehículo (12) que pasa por esta radiobaliza y está equipado con un aparato de vehículo (11) que emite una señal (10) con una curva conocida de su frecuencia (fs) en función del tiempo, caracterizada por:
un receptor (8) configurado para recibir la señal (10) de un vehículo (12) que pasa; una memoria (21) conectada al receptor (8) y configurada para grabar la curva (13, 14) de la frecuencia (fB) de la señal recibida (10) en función del tiempo, relativa a la curva conocida en función del tiempo; un detector (22) conectado a la memoria (21) y configurado para detectar un cambio (17) en la curva de frecuencia grabada (13, 14) que supere un primer valor umbral predefinido (c) ; un dispositivo de evaluación (23) conectado al detector (22) y a la memoria (21) y configurado para localizar dos zonas alejadas (15, 16) en la curva de frecuencia (13, 14) que estén situadas temporalmente antes y después del cambio detectado (17) y que indiquen un cambio de frecuencia (fB’) por debajo de un segundo valor umbral (s) ; un escalador (24) conectado a la memoria (21) y al dispositivo de evaluación (23) y configurado para escalar la curva de frecuencia grabada (13, 14) de tal modo que las zonas alejadas (15, 16) asumen valores predefinidos (±MF) ; y un diferenciador (25) que está conectado a continuación del escalador (24) y que determina la pendiente (fB’) de la curva de frecuencia escalada (13’, 14’) en un punto de inflexión (20) de la misma y a partir de ésta determina la distancia (a) .
8. Radiobaliza según la reivindicación 7, caracterizada porque la radiobaliza está montada en una carretera de varios carriles (4) y el diferenciador (25) está configurado para determinar a partir de la distancia (a) el carril (5, 6) , por el que pasa el vehículo (12) .
9. Radiobaliza según la reivindicación 7 u 8, caracterizada porque el diferenciador (25) determina el punto de inflexión (20) mediante localizando el punto de la curva de frecuencia (13’, 14’) en el que la frecuencia (fB) tiene un valor predefinido en la curva de frecuencia (13, 14) .
10. Radiobaliza según la reivindicación 7 u 8, caracterizada porque el diferenciador (25) determina el punto de inflexión (20) localizando el punto de la curva de frecuencia (13’, 14’) , en el que la frecuencia (fB) corresponde al valor promedio de frecuencia de las zonas alejadas (15, 16) .
11. Radiobaliza según una de las reivindicaciones 7 a 10, caracterizada porque la señal recibida (10) tiene al menos una frecuencia portadora modulada con una frecuencia de modulación y la frecuencia mencionada (fB) es la frecuencia de modulación que se obtiene por demodulación en el receptor (8) .
12. Radiobaliza según una de las reivindicaciones 7 a 11, caracterizada porque el receptor (8) es un receptor DSRC o WAVE.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden 5 excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción 10 • US5790052A [0004]
Patentes similares o relacionadas:
METODO Y SISTEMA DE CONTROL DE VEHICULOS ELECTRICOS MONOPLAZA, del 30 de Julio de 2020, de DURAN SERRADELL , Victor: Procedimiento de control de vehículos eléctricos monoplaza, que comprende los pasos de: - captación en tiempo real por parte del vehículo eléctrico monoplaza […]
Método y disposición para recolectar y procesar datos relacionados con el estado de carretera, del 20 de Mayo de 2020, de Klimator AB: Un método para recolectar y procesar datos relacionados con el estado de carretera de una red de carreteras representada por una red de cuadrícula, […]
Método y dispositivo de adquisición y gestión automática de perturbaciones en la carretera, del 29 de Abril de 2020, de Coyote System: Un método de adquisición y gestión mediante un servidor remoto de datos relacionados con perturbaciones en la carretera que hacen que los vehículos disminuyan […]
Sistema y procedimiento de guiado para automovilistas, del 24 de Febrero de 2020, de DE MIGUEL MARIA, Angel: 1. Sistema de guiado para automovilistas que comprende: - al menos una unidad de control (U) que comprende medios de almacenamiento de datos y de cálculo, - una serie […]
JUGUETE INTERACTIVO, del 28 de Enero de 2020, de VIDAL ROJAS, Juan Antonio: 1. Juguete interactivo, caracterizado por comprender un elemento activador que actúa como medio de enlace con una aplicación informática tipo app de realidad […]
Caracterización de una colisión de vehículo, del 1 de Enero de 2020, de GEOTAB Inc: Un método que comprende: en respuesta a la obtención de información con respecto a una colisión potencial entre un vehículo y un objeto, obtener, durante un periodo de […]
Política de distribución de mensajes local y global en un sistema de transporte inteligente que utiliza comunicaciones inalámbricas, del 11 de Diciembre de 2019, de HUAWEI TECHNOLOGIES CO., LTD.: Una entidad de comunicación (100a) asociada con una estación base (101a), en donde la entidad de comunicación (100a) comprende: un analizador […]
Sistema y procedimiento de guiado para automovilistas, del 3 de Octubre de 2019, de DE MIGUEL MARIA, Angel: Sistema y procedimiento de guiado para automovilistas, comprendiendo una serie de balizas empotrada en el centro de al menos un carril en un tramo de vía automovilística, […]