PROCEDIMIENTO PARA LA DETERMINACIÓN DE UNA POSICIÓN ABSOLUTA.
Procedimiento para la determinación de una posición absoluta con las siguientes etapas del procedimiento:
- exploración de un patrón de código de una serie de patrones de códigos, cada uno de cuyos patrones de códigos está definido de manera unívoca y está constituido por varios elementos de códigos (C1, C2, C3), así como exploración de elementos de códigos adicionales: - formación de una palabra de código (CW) con varios bits a través de la exploración del patrón de código; - formación de bits adicionales a través de la exploración de los elementos de códigos adicionales; - verificación de os bits de la palabra de código (CW) así como de los bits adicionales para determinar la fiabilidad y en el caso de que no se cumplan criterios predeterminados de uno de los bits, se asocia a éste una reconocimiento de error (F); - previsión de una serie de secuencias binarias, en la que en cada caso a una de estas secuencias binarias se asocia de forma unívoca una posición absoluta; - comparación de los bits de la palabra de código (CW) con la serie predeterminada de secuencias binarias y comparación de los bits adicionales con bits correspondientes de las secuencias binarias previstas y en el cado de que existe una coincidencia de todos los bits, asociación de esta posición absoluta correspondiente a la palabra de código (CW), no teniendo en cuenta en la comparación para la determinación de la coincidencia los bits provistos con un reconocimiento de error (F)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03017161.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 12 60 83292 TRAUNREUT ALEMANIA.
Inventor/es: MITTMANN, RUDOLF.
Fecha de Publicación: .
Fecha Solicitud PCT: 29 de Julio de 2003.
Clasificación Internacional de Patentes:
- G01D5/244R1
- G01D5/249C
- G01D5/347F
- G01D5/347F4
Clasificación PCT:
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G01D5/347 G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356732_T3.pdf


Fragmento de la descripción:
La invención se refiere a un procedimiento para la determinación de una posición absoluta de acuerdo con la reivindicación 1 así como a una instalación de medición de la posición para la realización del procedimiento.
5
En muchos campos, para la determinación de la posición de dos cuerpos móviles entre sí se emplean muchas veces instalaciones de medición de la posición absoluta. Las instalaciones de medición de la posición absoluta tienen, frente a los sistemas de medición puramente incremental, la ventaja de que en cualquier posición relativa se puede emitir también sin interrupción de la energía de alimentación inmediatamente una información de la posición correcta. 10
La posición absoluta es representada en este caso por un código, que está dispuesto en varias pistas que se extienden paralelas entre sí, por ejemplo como código Gray.
Especialmente economizadora de espacio es la disposición de la información de la posición en una única 15 pista de código con elementos de código dispuestos unos detrás de los otros en la dirección de medición. Los elementos de código están dispuestos en este caso unos detrás de otros en distribución pseudos-aleatoria, de manera que un número determinado de elementos de código sucesivos forma en cada caso un patrón de código o bien un patrón binario, que define de manera unívoca la posición absoluta como palabra de código. En el caso del desplazamiento de la instalación de exploración en un único elemento de código, se forma ya un patrón de código 20 nuevo y sobre toda la zona de medición a detectar de forma absoluta está disponible una secuencia de palabras de código diferentes. Un código secuencial de este tipo se designa como código de cadena o como código pseudo-aleatorio.
En instalaciones de medición de la posición pueden aparecer errores, por ejemplo, a través de contaminación 25 parcial de la escala, en la secuencia binarias que forma la palabra de código, que provocan una determinación errónea de la posición absoluta.
Ya se han propuesto procedimientos para la detección de un error de este tipo. En el documento EP 0 789 226 B1 se propone a tal fin explorar con una instalación de exploración al mismo tiempo al menos tres patrones de 30 códigos diferentes completos de la escala y a partir de ellos formar palabras de códigos. Las distancias reales de las palabras de códigos son comparadas con las distancias teóricas, con lo que a partir de las palabras de códigos detectadas al mismo tiempo se utiliza una palabra de código reconocida como correcta y las palabras de códigos reconocidas como erróneas son excluidas del procesamiento posterior.
35
A través de este procedimiento se eleva la fiabilidad o bien la seguridad funcional de una instalación de medición de la posición. Pero es un inconveniente que una palabra de código es excluida ya como errónea cuando solamente un único bit de la secuencia binaria es erróneo. Para conseguir una alta fiabilidad y seguridad funcional de la instalación de medición de la posición, deben explorarse al mismo tiempo muchas palabras de códigos.
40
En el documento DE 195 06 019 C2 se describe un procedimiento para la detección de errores. En este caso, se parte de que en el caso de una modificación de la posición, la nueva palabra de código debe coincidir con una palabra de código de la etapa de medición precedente o de la etapa de medición siguiente. Solamente en caso de coincidencia de la nueva palabra de código con una palabra de código vecina se asocia a la nueva palabra de código una posición absoluta. Se publica también una rutina de errores para la determinación de un error. En este 45 caso, se invierten sucesivamente bits de la nueva palabra de código y se comparan para la determinar la coincidencia con el bit correspondiente de las palabras de códigos vecinas. Esta rutina se realiza hasta que se establece una coincidencia de la nueva palabra de código con una palabra de código vecina. Los bits, que deben invertirse hasta la coincidencia, se reconocen como erróneos, con lo que se pueden reconocer también elementos de detección que trabajan erróneamente. 50
A través de este procedimiento solamente es posible una verificación de errores.
La invención tiene el cometido de indicar un procedimiento, con el que se garantiza una determinación tolerante de errores y, a pesar de todo, fiable de una posición absoluta. 55
Este cometido se soluciona según la invención por medio de las características de la reivindicación 1.
Una instalación de medición de la posición para la realización del procedimiento se indica en la reivindicación 8. 60
[0013]Las ventajas conseguidas con la invención consisten en que no deben separarse todas las palabras de códigos erróneas. Con el procedimiento se toleran bits erróneos en una palabra de código. La probabilidad de que a través de la exploración de una zona relativamente pequeña del código se pueda detectare una posición absoluta correcta es muy grande, por lo que según la invención se eleva la seguridad funcional y la capacidad funcional de la instalación de medición de la posición. 5
Las formas de realización ventajosas de la invención se indican en las reivindicaciones dependientes.
La invención se explica en detalle con la ayuda de los dibujos, en los que:
10
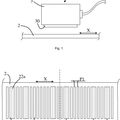
La figura 1 muestra una instalación de medición de la posición en representación esquemática.
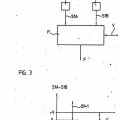
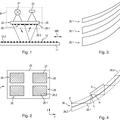
La figura 2 muestra el principio de una verificación de errores.
La figura 3 muestra las señales para la verificación de errores según la figura 2. 15
La figura 4 muestra palabras de códigos posibles con exploración redundante y posiciones absolutas asociadas.
La figura 5a muestra una rutina de comparación sin bit explorado como erróneo. 20
La figura 5b muestra una rutina de comparación con un bit reconocido como erróneo.
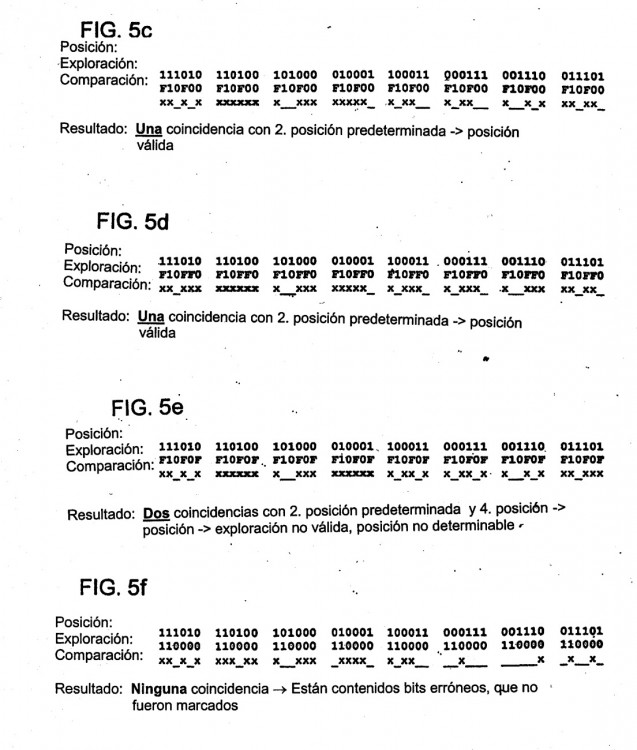
La figura 5c muestra una rutina de comparación con dos bits reconocidos como erróneos.
25
La figuras 5d muestra una rutina de comparación con una primera disposición de tres bits reconocidos como erróneos.
La figura 5e muestra una rutina de comparación con una segunda disposición de tres bits reconocidos como erróneos, y 30
La figura 5f muestra una rutina de comparación con bits erróneos que, sin embargo, no fueron reconocidos como erróneos.
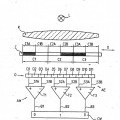
En la figura 1 se representa de forma esquemática una instalación de medición de la longitud. Esta 35 instalación de medición de la longitud trabaja de acuerdo con el principio de exploración óptica, en el que un código C es explorado en el procedimiento al trasluz. Para la exploración del código C sirve una instalación de exploración AE, que está dispuesta móvil en la dirección de medición X con relación al código C.
El código C está constituido por una secuencia de elementos de código C1, C2, C3 de la misma longitud, 40 dispuestos uno detrás de los otros en la dirección de medición X. Cada elemento de código C1, c2, C3 está constituido de nuevo por dos zonas parciales A y B de la misma longitud, dispuestas inmediatamente sucesivas adyacentes en la dirección de medición X, las cuales están configuradas complementarias entre sí. Complementario significa en este caso que poseen propiedades inversas, es decir, que en el procedimiento de exploración óptica son transparentes y no transparentes o bien en la exploración al trasluz son reflectantes y no reflectantes, 45 respectivamente. Un código de este tipo se designa también como código de Manchester.
El código secuencial C s explorado por la instalación de exploración AE, que contiene una fuente de luz L, cuya luz ilumina a través de una lente colimadora K varios elementos de código C1, C2, C3 consecutivos. La luz... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación de una posición absoluta con las siguientes etapas del procedimiento:
- exploración de un patrón de código de una serie de patrones de códigos, cada uno de cuyos patrones de códigos está definido de manera unívoca y está constituido por varios elementos de códigos (C1, C2, C3), así como exploración de elementos de códigos adicionales: 5
- formación de una palabra de código (CW) con varios bits a través de la exploración del patrón de código;
- formación de bits adicionales a través de la exploración de los elementos de códigos adicionales;
- verificación de os bits de la palabra de código (CW) así como de los bits adicionales para determinar la fiabilidad y en el caso de que no se cumplan criterios predeterminados de uno de los bits, se asocia a éste una reconocimiento de error (F); 10
- previsión de una serie de secuencias binarias, en la que en cada caso a una de estas secuencias binarias se asocia de forma unívoca una posición absoluta;
- comparación de los bits de la palabra de código (CW) con la serie predeterminada de secuencias binarias y comparación de los bits adicionales con bits correspondientes de las secuencias binarias previstas y en el cado de que existe una coincidencia de todos los bits, asociación de esta posición absoluta correspondiente 15 a la palabra de código (CW), no teniendo en cuenta en la comparación para la determinación de la coincidencia los bits provistos con un reconocimiento de error (F).
2. Procedimiento de acuerdo con la reivindicación 1, en el que los elementos de códigos adicionales son al menos una parte de otro patrón de código de la serie de patrones de códigos.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, en el que a través de la exploración de los 20 patrones de códigos se generan varias señales de exploración analógicas (S) y se utilizan para la formación de un bit de al menos una de estas señales de exploración (S).
4. Procedimiento de acuerdo con la reivindicación 3, en el que durante la verificación de un bit para determinar la fiabilidad se compara la amplitud de la señal de exploración, utilizada para la formación de este bit, con una amplitud teórica. 25
5. Procedimiento de acuerdo con la reivindicación 3, en el que para la formación de un bit se utilizan dos señales de exploración (S1A, S1B) y durante la verificación de la fiabilidad de este bit se compara la diferencia de las dos señales de exploración /S1A, S1B) con una diferencia teórica (V).
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que la previsión de la serie de secuencias binarias y la asociación a una posición absoluta de cada una de estas secuencias binarias se realiza 30 a través de una tabla de asociación memorizada.
7. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, en el que la previsión de la serie de secuencias binarias y la asociación de una posición absoluta de cada una de estas secuencias binarias se realiza de acuerdo con una especificación de formación.
8. Instalación de medición de la posición para la realización del procedimiento de acuerdo con la 35 reivindicación 1, con
- medios para la exploración de un patrón de código de una serie de patrones de códigos, cada uno de cuyos patrones de códigos define de manera unívoca una posición absoluta y está constituido por varios elementos de códigos (C1, C2, C3) así como para la exploración de elementos de códigos adicionales;
- medios para la formación de una palabra de código (CW) con varios bits a través de la exploración del 40 patrón de código;
- medios para la formación de bits adicionales a través de la exploración de los elementos de códigos adicionales;
- medios para la verificación de los bits de la palabra de código (CW) así como de los bits adicionales para determinar la fiabilidad, que están diseñados para asociar, en el caso de que no se cumplan criterios 45 predeterminados de uno de los bits, un reconocimiento de error (F) a este bit;
- medios para la previsión de una serie de secuencias binarias, de manera que se asocia en cada caso de manera unívoca una posición absoluta a una de estas secuencias binarias;
- medios para la comparación de los bits de la palabra de código (CW) con la serie predeterminada de secuencias binarias y para la comparación de los bits adicionales con bits correspondientes de las secuencias binarias predeterminadas y que asocian, en el caso de que se produzca una coincidencia de todos los bits, esta posición absoluta correspondiente a la palabra de código (CW), de manera que durante la comparación para determinar la coincidencia, no se tienen en cuenta los bits provistos con un 5 reconocimiento de error (F).
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LA POSICIÓN DE UN VEHÍCULO, PROGRAMA INFORMÁTICO Y PRODUCTO DE PROGRAMA INFORMÁTICO, del 27 de Diciembre de 2011, de PEPPERL + FUCHS GMBH: Procedimiento para la determinación de la posición de un vehículo, que se puede desplazar a lo largo de una trayectoria , estando dispuestos […]
 SENSOR DE ANGULO DE DIRECCION, del 10 de Diciembre de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Sensor de angulo de direccion, especialmente para determinar el angulo de direccion de un vehiculo, con un elemento codificador […]
SENSOR DE ANGULO DE DIRECCION, del 10 de Diciembre de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Sensor de angulo de direccion, especialmente para determinar el angulo de direccion de un vehiculo, con un elemento codificador […]
 DISPOSITIVO OPTOELECTRÓNICO DE MEDIDA, del 1 de Marzo de 2011, de FAGOR, S.COOP.: Dispositivo optoelectrónico de medida, que comprende una regla graduada y una cabeza lectora que puede desplazarse con respecto a la regla […]
DISPOSITIVO OPTOELECTRÓNICO DE MEDIDA, del 1 de Marzo de 2011, de FAGOR, S.COOP.: Dispositivo optoelectrónico de medida, que comprende una regla graduada y una cabeza lectora que puede desplazarse con respecto a la regla […]
SISTEMA DE INTERRUPTORES DE COLUMNA DE DIRECCIÓN CON FUNCIÓN DE MODO DE EMERGENCIA, del 5 de Septiembre de 2011, de LEOPOLD KOSTAL GMBH & CO. KG: Sistema de interruptores de columna de dirección para un vehículo automóvil con un dispositivo para captar la posición del sistema de interruptor de columna de dirección, […]
DISPOSITIVO PARA CAPTAR OPTOELECTRÓNICAMENTE POSICIONES DE CONMUTACIÓN DE UN MEDIO DE CONMUTACIÓN, del 8 de Junio de 2011, de LEOPOLD KOSTAL GMBH & CO. KG: Dispositivo para captar optoelectrónicamente posiciones de conmutación de un medio de conmutación de guiado forzado accionado mecánicamente, comprendiendo receptores […]
 Estructura de malla para un dispositivo óptico de medición de posición, del 29 de Julio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de malla para un dispositivo óptico de medición de posición,
- que contiene zonas de partición que presentan como mínimo […]
Estructura de malla para un dispositivo óptico de medición de posición, del 29 de Julio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de malla para un dispositivo óptico de medición de posición,
- que contiene zonas de partición que presentan como mínimo […]
Aparato codificador, del 6 de Mayo de 2020, de RENISHAW PLC: Un aparato codificador que comprende una escala , una carcasa protectora y un conjunto de cabezal de lectura que comprende un receptor […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]