Procedimiento para la creación de coordenadas globales para la medición de precisión de una estructura hueca.
Procedimiento para la creación de las coordenadas globales de una estructura poliédrica hueca,
cuyoprocedimiento comprende las siguientes etapas:
una primera etapa para disponer una serie de transmisores (100) y sensores de referencia (110) sobre la superficiede referencia (A) en la estructura hueca, analizar señales procedentes de la serie de transmisores (100) de lasuperficie de referencia (A) utilizando los sensores de referencia (110) de las superficies de referencia (A) y creandoun sistema de coordenadas local de la superficie de referencia en base a las coordenadas de posición medidas porlos sensores de referencia (110) de la superficie de referencia (A);
una segunda etapa de disponer sensores de referencia (110) en puntos comunes de una primera superficie verticaladyacente a la superficie de referencia y midiendo y almacenando las coordenadas de los puntos comunesutilizando los sensores de referencia (110) en los puntos comunes;
una tercera etapa de disponer una serie de transmisores (100) y sensores de referencia (110) sobre la primerasuperficie vertical adyacente a la superficie de referencia, analizando señales desde la serie de transmisores (100)de la primera superficie vertical, utilizando los sensores de referencia (110) de la primera superficie vertical, ycreando un sistema de coordenadas local de la primera superficie vertical;
una cuarta etapa de transformar los sistemas de coordenadas locales creados en la primera y segunda etapas en unsistema de coordenadas global utilizando las coordenadas de los puntos comunes medidas en la segunda etapa;una quinta etapa de realización repetida desde la segunda etapa hasta la cuarta etapa sobre superficies verticalesrestantes de la estructura poliédrica hueca, para transformar los sistemas de coordenadas locales respectivos en unsistema de coordenadas global unificado;
una sexta etapa de disponer transmisores (100) en una superficie superior adyacente a cada superficie vertical yobtener la relación entre el sistema de coordenadas global y un sistema de coordenadas local de la superficiesuperior utilizando las coordenadas del punto común; y
una séptima etapa de creación y aplicación de un sistema de coordenadas global utilizando la relación obtenida enla sexta etapa.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/KR2007/004664.
Solicitante: SAMSUNG HEAVY IND. CO. LTD.
Nacionalidad solicitante: República de Corea.
Dirección: 530, JANGPYEONG-RI, SINHYEON-EUP, GEOJE-SI GYEONGSANGNAM-DO 656-710 REPUBLICA DE COREA.
Inventor/es: PARK, YOUNG-JUN, CHUNG,SEONG-YOUB, KIM,SUNG-HAN, SONG,SE-HWAN, KIM,JAE-HOON.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Subdivisión interior de cascos (estructura del espacio de mamparas B63B 3/56).
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
- G01C15/00 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
- G01S19/11 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › siendo los elementos cooperantes seudolitos o repetidores de señales de sistemas de posicionamiento por satélite.
PDF original: ES-2391482_T3.pdf
Fragmento de la descripción:
Procedimiento para la creación de coordenadas globales para la medición de precisión de una estructura hueca
Sector técnico
La presente invención se refiere a un procedimiento para la creación de coordenadas globales, que crea un sistema de coordenadas tridimensionales en la fabricación de una estructura hueca, y más particularmente se refiere a un procedimiento para la creación de un sistema de coordenadas global que crea un sistema de coordenadas tridimensional en la fabricación de una estructura hueca por análisis de señales procedentes de transmisores en un espacio, utilizando un detector para crear un sistema de coordenadas tridimensional.
Antecedentes técnicos
En general, cuando se fabrica un carguero, utilizado para transportar artículos tales como grano, petróleo, gas y similares, se lleva a cabo un trabajo en un armazón hueco poliédrico de tipo bloque tridimensional. Cuando el trabajo ha sido realizado en una estructura hueca, debido a restricciones espaciales, incluyendo la instalación de un instrumento de medición de precisión en la estructura hueca, los trabajadores pueden llevar a cabo solamente mediciones manuales utilizando una cinta de medir.
De acuerdo con ello, cuando el trabajo es llevado a cabo dentro de la estructura hueca, se acumulan los errores debido a mediciones inexactas, y por lo tanto se tiene que llevar a cabo varias veces un trabajo de corrección. Por esta razón, el avance del trabajo o la productividad se pueden deteriorar.
Además, en la fabricación de una estructura tridimensional hueca es necesario llevar cabo sobre cada una de las superficies de la estructura hueca, trabajos tales como fijación, soldadura, pulido y pintura. Con este objetivo se instala un armazón grande en la estructura hueca, lo que provoca que no se transmita adecuadamente una señal de un GPS interior. Además, el GPS interior necesita ser instalado repetidamente y retirado en muchos lugares de la estructura hueca para medir las coordenadas de dicha estructura hueca. No obstante, en este caso, dado que se genera una serie de sistemas de coordenadas locales, existe la dificultad de gestionar los datos de las coordenadas medidas.
Además, en la estructura tridimensional hueca, cuando las superficies están unidas entre si para formar un espacio, una parte a soldar se puede situar en un lugar elevado. De acuerdo con ello, se dispone temporalmente un andamio en la pared interna de la estructura hueca, a efectos de que los trabajadores puedan subir por el andamio y llevar a cabo la soldadura. En este caso, no obstante, las señales láser pueden ser interferidas por el andamio. Por lo tanto, es posible que no se puedan medir todos los lugares cuya medición se desea utilizando el GPS interno, instalado de manera fija en un lugar. Por esta razón, es necesario llevar a cabo la medición mientras se desplaza el GPS interno en varios lugares, lo que causa la generación de los sistemas de coordenadas locales. Como resultado de ello, pueden presentarse dificultades en la gestión conjunta de los datos de medición. El documento US 2006/007180 A1 muestra procedimiento s de triangulación para determinar sin cables las coordenadas a efectos de determinar localizaciones.
Materia de la invención
Problema técnico
Un objetivo de la invención consiste en dar a conocer un procedimiento para la creación de un sistema de coordenadas global que crea un sistema de coordenadas tridimensional en la fabricación de una estructura hueca al analizar señales referentes de una serie de transmisores en la estructura hueca utilizando un sensor de referencia y generando una coordenada global, mejorando de esta manera la precisión de la medición.
Solución técnica
De acuerdo con un aspecto de la invención, se da a conocer un procedimiento para la creación de un sistema de coordenadas global de una estructura poliédrica hueca, que comprende: una primera etapa de disponer una serie de transmisores sobre una superficie de referencia de la estructura hueca, disponer una serie de sensores de referencia para crear las coordenadas de la superficie de referencia y crear un sistema de coordenadas local de la superficie de referencia en base a las coordenadas de posición medidas por los sensores de referencia; una segunda etapa de disponer sensores de referencia en puntos comunes de una primera superficie vertical adyacente a la superficie de referencia para medir y almacenar las coordenadas de los puntos comunes; una tercera etapa de proporcionar una serie de transmisores y sensores de referencia de la primera superficie vertical adyacente a la superficie de referencia para crear un sistema de coordenadas local de la primera superficie vertical; una cuarta etapa de transformar los sistemas de coordenadas locales creados en la primer y tercera etapas en un sistema de coordenadas global que utiliza las coordenadas de los grupos comunes medidas en la segunda etapa; una quinta etapa de llevar a cabo repetidamente la segunda etapa hasta la cuarta etapa en las restantes superficies verticales de la estructura poliédrica hueca para transformar los respectivos sistemas de coordenadas locales en un sistema de coordenadas global unificado; una sexta etapa de disponer transmisores en una superficie superior adyacente a cada una de la superficies verticales para obtener la relación entre el sistema de coordenadas global y un sistema de coordenadas local de la superficie superior utilizando las coordenadas del punto común, y una sexta etapa de creación y aplicación de un sistema de coordenadas global utilizando la relación obtenida en la sexta etapa.
Efectos ventajosos
De acuerdo con un aspecto de la invención, se dispone una serie de transmisores en un espacio tridimensional y un detector analiza las señales procedentes de los transmisores para crear unas coordenadas unificadas. Por lo tanto, se pueden calcular la posición exacta y relación de posición, y como resultado se puede mejorar la precisión de medición.
Breve descripción de los dibujos
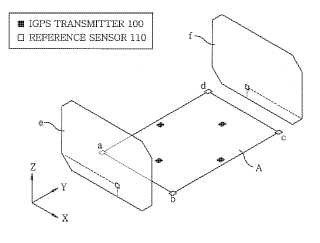
La figura 1 es un diagrama que muestra un proceso de disposición de los transmisores y IGPS en la superficie inferior de una estructura hueca para crear coordenadas locales, de acuerdo con una realización de la invención;
La figura 2 es un diagrama que muestra un proceso de transformación de coordenadas globales utilizando transmisores IGPS dispuestos en una superficie vertical, y sensores de referencia, según una realización de la invención;
La figura 3 es un diagrama que muestra un proceso de transformación de coordenadas global que utiliza transmisores IGPS dispuestos en la superficie vertical opuesta y sensores de referencia, según una realización de la invención;
La figura 4 es un diagrama ilustrativo de un proceso de transformación de coordenadas globales utilizando transmisores IGPS dispuestos en una superficie vertical adyacente, de acuerdo con una realización a título de ejemplo de la invención;
La figura 5 es un diagrama que muestra un procedimiento para mantener coordenadas globales en un espacio, de acuerdo con una realización de la invención; y
La figura 6 es un diagrama de flujo que muestra un procedimiento de creación de coordenadas globales utilizando un transmisor IGPS, de acuerdo con una realización de la invención.
Mejor forma de llevar a cabo la invención
A continuación, se describirá en detalle una realización de la invención, haciendo referencia a los dibujos adjuntos.
El IGPS (Sistema de Posicionamiento Global) se refiere a un concepto que determina la posición de un receptor utilizando tres o más satélites, y este concepto es aplicado a interiores, implementando de esta manera un IGPS (GPS de interiores) que se describe más adelante. Es decir, una serie de transmisores queda dispuesta en un espacio, y un receptor es situado en una posición predeterminada, pudiéndose obtener un valor de coordenadas tridimensionales relativo de la posición determinada. Los detalles se dan a conocer en la patente US No. 6.501.543.
Un sistema de coordenadas global tridimensional, de acuerdo con una realización de la invención, incluye una serie de IGPS, compuesta cada una de ellas de transmisores y receptores dispuestos en una superficie de fondo (A) , una primera superficie vertical (e) perpendicular a la superficie de fondo (A) , y una segunda superficie vertical f opuesta a la primera superficie... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la creación de las coordenadas globales de una estructura poliédrica hueca, cuyo procedimiento comprende las siguientes etapas:
una primera etapa para disponer una serie de transmisores (100) y sensores de referencia (110) sobre la superficie de referencia (A) en la estructura hueca, analizar señales procedentes de la serie de transmisores (100) de la superficie de referencia (A) utilizando los sensores de referencia (110) de las superficies de referencia (A) y creando un sistema de coordenadas local de la superficie de referencia en base a las coordenadas de posición medidas por
los sensores de referencia (110) de la superficie de referencia (A) ; una segunda etapa de disponer sensores de referencia (110) en puntos comunes de una primera superficie vertical adyacente a la superficie de referencia y midiendo y almacenando las coordenadas de los puntos comunes utilizando los sensores de referencia (110) en los puntos comunes; una tercera etapa de disponer una serie de transmisores (100) y sensores de referencia (110) sobre la primera
superficie vertical adyacente a la superficie de referencia, analizando señales desde la serie de transmisores (100) de la primera superficie vertical, utilizando los sensores de referencia (110) de la primera superficie vertical, y creando un sistema de coordenadas local de la primera superficie vertical; una cuarta etapa de transformar los sistemas de coordenadas locales creados en la primera y segunda etapas en un sistema de coordenadas global utilizando las coordenadas de los puntos comunes medidas en la segunda etapa;
una quinta etapa de realización repetida desde la segunda etapa hasta la cuarta etapa sobre superficies verticales restantes de la estructura poliédrica hueca, para transformar los sistemas de coordenadas locales respectivos en un sistema de coordenadas global unificado; una sexta etapa de disponer transmisores (100) en una superficie superior adyacente a cada superficie vertical y obtener la relación entre el sistema de coordenadas global y un sistema de coordenadas local de la superficie
superior utilizando las coordenadas del punto común; y una séptima etapa de creación y aplicación de un sistema de coordenadas global utilizando la relación obtenida en la sexta etapa.
2. Procedimiento, según la reivindicación 1, en el que los sensores de referencia (110) están dispuestos en los
puntos comunes que tienen tres o más puntos marcados cuando la serie de transmisores (100) es dispuesta sobre una superficie vertical de la estructura hueca.
3. Procedimiento, según la reivindicación 1, en el que los puntos comunes son puntos en los que se reciben
señales procedentes de los transmisores (100) sobre una superficie adyacente a la superficie de referencia (A) 35 correspondiente a coordenadas locales predeterminadas cuando se miden las coordenadas locales respectivas.
4. Procedimiento, según la reivindicación 1, en el que, cuando una superficie de referencia (A) es {G}; un sistema de coordenadas por tres o más sensores de referencia (110) es {R}; un sistema de coordenadas en una
;
superficie vertical es {H}; una transformación del sistema de coordenadas entre {R} y {G} se representa por
una transformación del sistema de coordenadas entre {R} y {H} se representa por y una transformación del
sistema de coordenadas entre {H} y {G} se representa por .
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Punta para un escáner óptico, del 25 de Diciembre de 2019, de 3SHAPE A/S: Una punta para un escáner 3D, en donde la punta comprende: - un armazón de punta , donde una primera parte (605a) del armazón comprende un primer material […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
Dispositivo de medición y procedimiento para la medición por triangulación, del 5 de Junio de 2019, de Pepperl+Fuchs AG: Dispositivo de medición para la medición por triangulación, que presenta - un transmisor de luz para emitir luz de iluminación en un modo de medición, […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de monumento montado en robótica para sistemas de metrología, del 14 de Febrero de 2019, de THE BOEING COMPANY: Un aparato que comprende: uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos está configurado para moverse a una posición respectiva […]
Procedimiento para medir el estado de una vía usando un vehículo en funcionamiento, y vehículo en funcionamiento para medir el estado de una vía, del 9 de Enero de 2019, de NIPPON STEEL CORPORATION: Procedimiento de medición de un estado de una vía (R) usando un vehículo para operaciones comerciales, en el que el vehículo para operaciones comerciales […]
Dispositivo auxiliar y procedimiento para colocar a medida una disposición de medición óptica que se puede montar en un manipulador, del 10 de Enero de 2018, de KUKA ROBOTER GMBH: Dispositivo auxiliar para la colocación a medida de una disposición de medición óptica que puede montarse en un manipulador , […]