PROCEDIMIENTO Y APARATO PARA OPERAR UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE.
Un procedimiento para operar un aparato (25-27, 109, 110) de localización en un sistema (10,
101) de posicionamiento por satélite, que comprende:
determinar y almacenar (41) una pluralidad de parámetros de corrección diferencial de pseudorrangos del GPS, cada uno con un correspondiente sello temporal de parámetros de corrección diferencial del GPS, caracterizado por:
recibir (43) una o más transmisiones desde una o más unidades móviles (12, 102b, 103b, 104b), comprendiendo las transmisiones conjuntos de pseudorrangos, teniendo cada conjunto un correspondiente sello temporal de pseudorrango; y
seleccionar, comparando los sellos temporales de parámetros de corrección diferencial del GPS y los sellos temporales de pseudorrangos, un parámetro de corrección diferencial del GPS y un conjunto de pseudorrangos, siendo el parámetro seleccionado de corrección diferencial del GPS para corregir el conjunto seleccionado de pseudorrangos (45)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07016080.
Solicitante: SNAPTRACK INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE,SAN DIEGO CA 92121-1714.
Inventor/es: KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Abril de 1999.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S1/00S2B4
- G01S1/00S2B5
- G01S5/14S1A1
Clasificación PCT:
- G01S5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
Procedimiento y aparato para operar un receptor de un sistema de posicionamiento por satélite.
Antecedentes de la invención
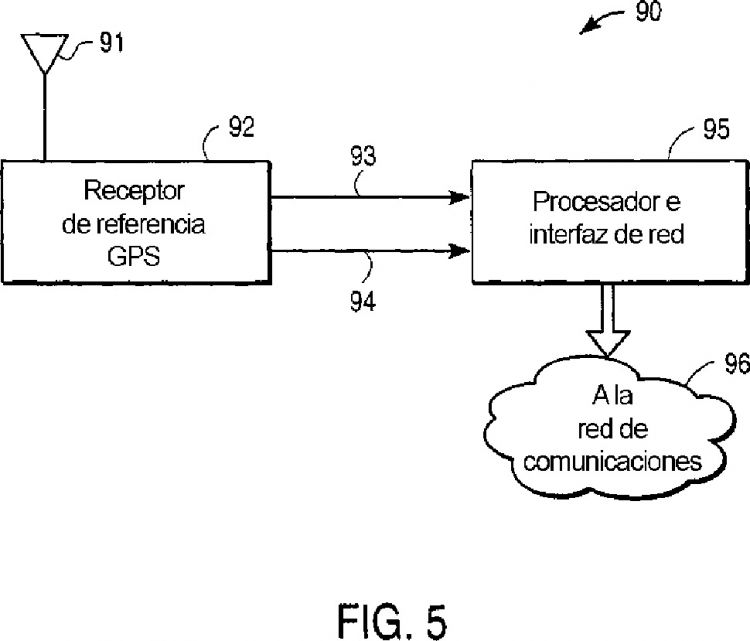
La presente invención se refiere a un procedimiento para operar un receptor de un sistema de posicionamiento por satélite (SPS) y, de manera más particular, se refiere a un sistema en el que el receptor proporciona, a través de un enlace de comunicaciones sin hilos, información relativa a su posición.
Los sistemas convencionales de posicionamiento por satélite (SPS) tales como el Sistema de Posicionamiento Global (GPS) usan señales provenientes de satélites para determinar su posición. Los receptores GPS normalmente determinan su posición mediante el cálculo de los tiempos relativos de llegada de las señales transmitidas de manera simultánea provenientes de una multiplicidad de satélites GPS. Estos satélites transmiten, como parte de su mensaje, tanto los datos de posicionamiento del satélite como los datos sobre la hora del día más la temporización del reloj, a los que se hace referencia conjuntamente como los datos de efemérides. El proceso de búsqueda y de adquisición de las señales GPS, la lectura de los datos de efemérides para una multiplicidad de satélites y el cálculo de la localización del receptor a partir de estos datos consumen tiempo, necesitando a menudo varios minutos. En muchos casos, este largo tiempo de procesamiento es inaceptable y además limita en gran manera la vida de la batería en operaciones y aplicaciones portátiles.
Otra limitación actual de los receptores GPS actuales es que su funcionamiento está limitado a situaciones en las que claramente hay múltiples satélites a la vista, sin obstrucciones, y en las que una antena de buena calidad está colocada de manera apropiada para la recepción de dichas señales. De tal manera, son normalmente inutilizables en aplicaciones portátiles montadas sobre la estructura y en áreas en las que existe un significativo bloqueo por la vegetación o por edificaciones, y dentro de edificios.
Existen dos funciones principales de los sistemas de recepción del GPS: (1) cálculo de los pseudorrangos para los distintos satélites GPS; y (2) cálculo de la posición de la plataforma de recepción que usa estos pseudorrangos y estos datos de temporización y de efemérides de satélite. Los pseudorrangos son simplemente los retardos en el tiempo medidos entre la señal recibida desde cada satélite y un reloj local en el receptor del GPS. Las efemérides de satélite y los datos de temporización se extraen de la señal del GPS una vez que se ha adquirido y que se ha hecho su seguimiento. Como se ha declarado con anterioridad, la recogida de esta información normalmente lleva un tiempo relativamente largo (tal como de treinta segundos a varios minutos) y se debe llevar a cabo con un buen nivel de la señal recibida, a fin de conseguir bajas tasas de error.
Recientemente, los receptores del GPS se han usado con transmisores de radio, tales como un teléfono celular o un teléfono móvil en un coche, para transmitir la posición del receptor a medida que éste se desplaza. Los sistemas convencionales combinados de GPS/comunicaciones transmiten habitualmente una posición desde el transmisor de radio a una estación base situada remotamente. Habitualmente, el receptor del GPS determinará su posición y después proporcionará esa información al transmisor, que transmite entonces la posición determinada antes de que el receptor del GPS haya determinado una siguiente posición. Esto permite a un operador en la estación base situada remotamente, que recibe la posición a través de la señal de radio, seguir la ruta del receptor del GPS a medida que se desplaza a lo largo del tiempo. En una realización alternativa, descrita, por ejemplo, en la Patente de los Estados Unidos número 5.663.734, el receptor móvil del GPS, que incluye un transmisor de comunicaciones, transmite información de pseudorrango etiquetada con horas, en lugar de un cálculo completado de la posición (tal como la latitud, la longitud y la altitud del receptor del GPS). En este caso, la unidad móvil, que incluye al receptor del GPS, recogerá las señales del GPS y procesará esas señales para determinar los pseudorrangos para los diversos satélites que están a la vista en un instante particular, y después el transmisor transmitirá estos pseudorrangos a una estación base situada remotamente, que entonces procesará estos pseudorrangos con las etiquetas de horas de los pseudorrangos, más los datos de efemérides recogidos en, o suministrados a, la estación base a fin de determinar una posición de la unidad móvil. También, en este caso, el transmisor transmitirá un conjunto de pseudorrangos antes de que el receptor del GPS determine un siguiente conjunto de pseudorrangos.
Mientras que estos enfoques anteriores proporcionan una manera para hacer un seguimiento de la ruta de un receptor del GPS en movimiento, existen varios reparos con el uso de estas técnicas. En el caso del receptor móvil del GPS que determina su posición y que transmite la posición a una estación base situada remotamente, la unidad móvil debe tener una buena visión del cielo y recibir claramente múltiples satélites, a fin de poder calcular los pseudorrangos y leer los datos de efemérides antes de que el receptor del GPS pueda determinar su posición. Además, en el caso en el que este receptor móvil del GPS intente calcular varias posiciones y transmitirlas luego en una transmisión, este receptor habitualmente no podrá beneficiarse de las correcciones diferenciales del GPS, a menos que se almacenen temporalmente un gran conjunto de correcciones diferenciales en la estación base. Un receptor móvil del GPS que recoja una serie de muestras digitalizadas de señales del GPS y transmita la serie en una transmisión, consumirá grandes cantidades de energía de batería y puede provocar la congestión en el enlace inalámbrico, debido a la gran cantidad de datos que se están recogiendo, almacenando y transmitiendo. Véase por ejemplo, la Solicitud de Patente Europea 0 508 405.
El documento US 5563607 describe una técnica de realizar la corrección diferencial del GPS de ajustes de posición, determinados por un errabundo (una estación móvil), sobre la base de datos de corrección de errores transmitidos por una estación base. El errabundo almacena datos de ajuste no corregidos y la hora del ajuste, y transmite una solicitud de datos de corrección de errores a una estación de referencia. La estación base responde con datos de corrección de errores válidos en el momento del ajuste, y el errabundo emplea entonces los datos de corrección de errores recibidos para calcular un ajuste diferencialmente corregido.
En el caso del receptor móvil del GPS que transmite pseudorrangos de uno en uno, el transmisor de comunicación debe arrancarse repetidamente a fin de transmitir cada conjunto de pseudorrangos después de que éstos hayan sido determinados. Esto puede tender a disminuir la vida de la batería en la unidad móvil y también puede provocar la congestión en el enlace de comunicación inalámbrica entre la unidad móvil y una estación base. Además, los costes de tiempo en el aire pueden ser altos para dicho funcionamiento.
De esta manera, es deseable proporcionar un procedimiento y un sistema mejorados para proporcionar múltiples conjuntos de información de posición durante un período de tiempo a través de una unidad móvil del GPS.
Resumen de la invención
La presente invención proporciona procedimientos y aparatos para operar un receptor de un sistema de posicionamiento por satélite de forma que se pueda hacer un seguimiento en el tiempo de la posición del receptor.
Según un primer aspecto de la invención, se proporciona un procedimiento para operar un aparato de localización en un sistema de posicionamiento por satélite, como se declara en la reivindicación 1.
Según un segundo aspecto de la invención, se proporciona un aparato de localización para su empleo en un sistema de posicionamiento por satélite, como se declara en la reivindicación 7.
En un ejemplo de un procedimiento según la presente invención, se determina una primera pluralidad de pseudorrangos una primera vez, y se determina una segunda (y tal vez adicional) pluralidad de pseudorrangos una segunda (y tal vez adicional) vez, que tiene lugar después de la primera vez. La primera pluralidad de pseudorrangos y la segunda pluralidad de pseudorrangos se almacenan en el receptor del sistema de posicionamiento por satélite. Después de la segunda vez, la primera pluralidad de pseudorrangos y la segunda pluralidad de pseudorrangos...
Reivindicaciones:
1. Un procedimiento para operar un aparato (25-27, 109, 110) de localización en un sistema (10, 101) de posicionamiento por satélite, que comprende:
2. El procedimiento de la reivindicación 1, en el cual el conjunto seleccionado de parámetros de corrección tiene un correspondiente sello temporal de parámetros de corrección que es el más próximo al sello temporal de pseudorrango correspondiente al conjunto seleccionado de pseudorrangos.
3. El procedimiento de las reivindicaciones 1 o 2, en el cual la determinación de los parámetros de corrección incluye recibir los parámetros de corrección.
4. El procedimiento de cualquiera de las reivindicaciones 1 a 3, en el cual los parámetros de corrección son distintas correcciones del sistema de posicionamiento global, y cada sello temporal de parámetros de corrección es una hora del GPS que indica cuándo se determinó el correspondiente parámetro de corrección.
5. El procedimiento de cualquiera de las reivindicaciones 1 a 4, que comprende adicionalmente:
6. El procedimiento de la reivindicación 5, que comprende adicionalmente proporcionar (49) servicios de red o servicios de aplicación basados en la posición de la unidad móvil (12, 102b, 103b, 104b).
7. Un aparato (25-27, 109, 110) de localización para su empleo en un sistema (10, 101) de posicionamiento por satélite, que comprende:
8. El aparato (25-27, 109, 110) de localización de la reivindicación 7, en el cual el medio para seleccionar (51, 95) comprende adicionalmente medios para seleccionar el parámetro de corrección con un correspondiente sello temporal de parámetro de corrección que sea el más próximo al sello temporal de pseudorrango correspondiente al conjunto seleccionado de pseudorrangos.
9. El aparato (25-27, 109, 110) de localización de las reivindicaciones 7 u 8, en el cual los parámetros de corrección son correcciones diferenciales del sistema de posicionamiento global, y cada sello temporal de parámetros de corrección es una hora del GPS que indica cuándo se determinó el correspondiente parámetro de corrección.
10. El aparato (25 - 27, 109, 110) de localización de cualquiera de las reivindicaciones 7 a 9, que comprende adicionalmente:
11. El aparato de localización de la reivindicación 10, que comprende adicionalmente medios transmisores (25, 102a, 103a, 104a) para transmitir información de posición de la unidad móvil (12, 102b, 103b, 104b).
12. El aparato de localización de cualquiera de las reivindicaciones 7 a 11, en el cual el medio para seleccionar es un procesador (51, 95).
13. Un sistema de comunicación que comprende una pluralidad de unidades móviles (12, 102b, 103b, 104b) y una pluralidad de aparatos (25, 26, 27, 109, 110) de localización según cualquiera de las reivindicaciones 7 a 12, en el cual al menos uno de los aparatos de localización determina información de posición de al menos una de las unidades móviles sobre la base del conjunto corregido de pseudorrangos.
14. Un programa de ordenador que comprende medios de código de ordenador adaptados para realizar las etapas del procedimiento de cualquiera de las reivindicaciones 1 a 6 cuando dicho programa se ejecuta en un procesador.
Patentes similares o relacionadas:
 RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
 PROCEDIMIENTO Y SISTEMA DE POSICIONAMIENTO POR SATELITES, del 16 de Septiembre de 2010, de ASTRIUM SAS: Procedimiento para el posicionamiento de un usuario sobre la Tierra (T), empleando el citado procedimiento una pluralidad de satélites […]
PROCEDIMIENTO Y SISTEMA DE POSICIONAMIENTO POR SATELITES, del 16 de Septiembre de 2010, de ASTRIUM SAS: Procedimiento para el posicionamiento de un usuario sobre la Tierra (T), empleando el citado procedimiento una pluralidad de satélites […]
 DETERMINACION DE UN RENDIMIENTO PREDICHO DE UN SISTEMA DE NAVEGACION, del 2 de Septiembre de 2010, de RAYTHEON COMPANY: Método para determinar un rendimiento predicho de un sistema de aumentación de navegación, que comprende:
determinar un rendimiento normal del sistema de aumentación de […]
DETERMINACION DE UN RENDIMIENTO PREDICHO DE UN SISTEMA DE NAVEGACION, del 2 de Septiembre de 2010, de RAYTHEON COMPANY: Método para determinar un rendimiento predicho de un sistema de aumentación de navegación, que comprende:
determinar un rendimiento normal del sistema de aumentación de […]
Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, sistema para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, programa y producto de programa informático, del 22 de Julio de 2020, de DEUTSCHE TELEKOM AG: Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones […]
Servicios sensibles al contexto, del 24 de Junio de 2020, de Nokia Technologies OY: Un método que comprende: recibir, en un dispositivo inalámbrico , señales de sensor que caracterizan una o más condiciones ambientales, […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
Procedimientos y sistemas para la detección mejorada de mensajes de navegación electrónica, del 6 de Mayo de 2020, de exactEarth Ltd: Un procedimiento de generación y transmisión de una señal de sistema de identificación automática, AIS, que comprende un mensaje de navegación electrónica, comprendiendo […]