Procedimiento y aparato para localizar objetos no visibles.
Procedimiento para localizar un objeto que se encuentra detrás de una superficie opaca haciendo el objeto no visible,
que comprende proporcionar en proximidad al objeto un campo magnético de fuerza variable, detectar la fuerza del campo magnético en una pluralidad de posiciones respecto del objeto usando un conjunto de detectores magnéticos de efecto Hall, estando el conjunto de detectores de efecto Hall asociados geométricamente a una guía de mecanizado, de tal manera que la guía de mecanizado y el conjunto de detectores se posicionan fijamente el uno respecto del otro, interrogar los detectores para determinar el valor de la fuerza de campo en al menos la mayoría de los detectores, analizar las respuestas de los detectores para determinar el desplazamiento entre el objeto y la guía de mecanizado, y desplazar el conjunto y la guía de mecanizado a una posición en la cual el desplazamiento es mínimo, de tal manera que una vez que la guía de mecanizado se sitúa adyacente a la superficie en dicho punto de la superficie inmediata y centralmente recubriendo el objeto en cuestión, la posición del conjunto y la guía de mecanizado se fija usando medios de fijación para garantizar que dicha posición se fija durante una operación mecánica, caracterizado porque los medios de fijación se pueden operar para proporcionar un nivel de pluralidad de la fuerza de bloqueo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2003/003624.
Solicitante: AB ELECTRONIC LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: SILVER KEY CHURCH MANORWAY BELVEDERE ERITH KENT DA8 1EX REINO UNIDO.
Inventor/es: HUGHES,RICHARD DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21J15/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21J FORJADO; MARTILLADO; PRENSADO DE METALES; REMACHADO; HORNOS DE FORJA (laminado de metales B21B; fabricación de productos particulares por forjado o prensado B21K; chapeado B23K; tratamiento o acabado de superficies por martillado B23P 9/04; aumento de la compacidad de superficies por chorro de materiales en partículas B24C 1/10; características generales de las prensas, prensas para compactar los residuos B30B; hornos en general F27). › B21J 15/00 Remachado. › Dispositivos de control especialmente adaptados a las máquinas de remachar, no limitados a alguno de los subgrupos precedentes.
- B23B49/00 B […] › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › Sistemas de medida o de calibrado de las máquinas de escariar para la colocación o el guiado del taladro; Dispositivos para indicar los defectos de los taladros durante el escariado; Dispositivos para centrar los orificios que van a ser escariados (equipo demarcado B25H 7/00; dispositivos de medida, calibres G01B).
- G01D5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2321507_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato para localizar objetos no visibles.
Esta invención se refiere a la localización de objetos no visibles, particularmente, aunque no exclusivamente con el fin de identificar la posición de un objeto no visible para llevar a cabo una etapa de procesamiento mecánico en la proximidad al objeto localizado de este modo.
Hay muchas situaciones en las cuales se desea localizar un objeto de manera precisa, aunque el objeto en cuestión no sea visible. Un sencillo ejemplo es la localización de la posición de un miembro portante en un tabique hecho de un bastidor de madera a ambos lados del cual se fijan las placas de cartón-yeso. Si se desea fijar algo a la pared, por ejemplo, usando un gancho, es necesario garantizar que el gancho, por ejemplo atornillado a la pared, forma parte del soporte de madera, en vez del cartón-yeso, a partir del cual será fácil de retirar cuando se aplica una carga, porque el cartón-yeso no es particularmente resistente. Los procedimientos convencionales, tales como golpear una pared con los nudillos para determinar la localización de los miembros del bastidor portante de madera no dan resultados particularmente precisos y requieren pericia. Realizar un agujero guía a través del cartón-yeso e insertar una pieza de alambre doblado a través del mismo y dentro de la cavidad, así mismo no es fácil de realizar de una manera sencilla, y aunque se puede llevar a cabo la localización, por ejemplo usando un pequeño imán, de los habituales clavos de hierro que sujetan el cartón-yeso a la estructura de madera, de nuevo, los resultados tienden a ser bastantes imprecisos, aunque este último enfoque tiene la ventaja de evitar el intento de insertar un gancho donde ya hay un clavo debajo. El documento US-A-5917314 desvela un sistema de detección capacitivo para encontrar tacos de pared, mientras que el documento US-A-5434500 describe un soporte para marcar una posición de una partición precisamente opuesta a una posición seleccionada del otro lado contra el cual se apoya un generador de campo magnético.
Estos sistemas son útiles en el sector de la construcción, pero no se adaptan a su uso en situaciones en las cuales las dimensiones están sometidas a estrechos límites de tolerancia, algunas de los cuales son particularmente críticas en la fabricación. Por ejemplo, en la fabricación de aeronaves, una técnica ampliamente usada es la aplicación de una placa de metal o revestimiento a un bastidor subyacente, por ejemplo hecho de nervaduras o largueros. Con el fin de garantizar una conexión firme entre el revestimiento y la nervadura o travesaño, una técnica comúnmente empleada es la de fijar los dos juntos, por ejemplo con un remache o dispositivo de fijación especial. Con el fin de llevar a cabo esto último, las aberturas en el revestimiento y la nervadura o travesaño necesitan coincidir y esta coincidencia necesita ser particularmente precisa ya que si hay imprecisión, el remachado se puede volver más difícil, o incluso imposible y los remaches mal ajustados o mal aplicados se pueden aflojar cuando la aeronave está en servicio, lo cual conduce a un fallo potencialmente catastrófico. Por consiguiente, los requisitos para el emparejamiento preciso del agujero en el revestimiento con el agujero en la nervadura o larguero son muy estrictos y el precio por una precisión inadecuada puede ser el fallo del conjunto acabado en el cumplimiento de las rigurosas normas de seguridad, lo cual conduce a que todo el conjunto se ha de reciclar. Aunque si la nervadura o travesaño tiene agujeros preformados, es teóricamente posible usar cada uno de estos agujeros como guías sucesivas para realizar agujeros en un revestimiento aplicado, pero esto es normalmente poco práctico y algunas veces prácticamente imposible por razones de espacio, y porque aparecen imprecisiones. Además, perforar un agujero a través del revestimiento desde el interior no siempre proporciona una alineación precisa del agujero en el revestimiento, de manera que su eje corre exactamente en perpendicular a la superficie del revestimiento. Este es un problema particular cuando el revestimiento varía en espesor, por ejemplo ahusado desde una sección gruesa a 45 una sección fina. Sin embargo, trabajar desde el exterior, es decir trabajar con el revestimiento entre el operador y el larguero o nervadura significa que las posiciones de los agujeros no se pueden ver. Los intentos de usar plantillas para solucionar este caso no han tenido éxito. El documento EP1132164 desvela un procedimiento para instalar dispositivos de fijación en grandes estructuras de fuselaje.
La presente invención busca proporcionar un aparato para la detección rápida y muy precisa de un objeto no visible. Se ha de subrayar que el término "objeto" tal como se usa en la presente memoria está destinado a cubrir una gran variedad de posibilidades, incluyendo, en particular, un agujero.
Por consiguiente, en líneas generales con la presente invención se proporciona un procedimiento según la 55 reivindicación 1.
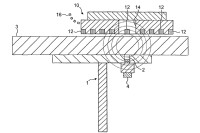
Usando tal enfoque, la localización del objeto detrás de la superficie opaca se puede determinar rápida y fácilmente y cuando el desplazamiento es mínimo, la guía de mecanizado se localiza entonces adyacente a la superficie, en el punto de la superficie que recubre inmediata y centralmente el objeto en cuestión. La posición del conjunto y de la guía de mecanizado se puede fijar bloqueando el conjunto sobre la superficie, después se puede usar la guía de mecanizado, por ejemplo un tubo guía para guiar, por ejemplo una broca para hacer un agujero en la superficie opaca precisamente localizada respecto del objeto no visible. El bloqueo del conjunto sobre la superficie se puede realizar mediante ventosas de vacío.
La presente invención proporciona, por consiguiente, también el aparato según la reivindicación 3.
El miembro base está adaptado preferiblemente para moverse a través de la superficie y permitir que la guía de mecanizado se alinee con el objeto. El aparato incluye medios de fijación adaptados para bloquear la posición relativa del miembro base y el objeto, el uno respecto del otro. Preferiblemente, los medios para analizar incluyen un medio de visualización adaptado para indicar la localización del objeto respecto del conjunto de detectores, y por consiguiente para indicar cuando el conjunto está posicionado con la guía de mecanizado asociada al mismo localizado lo más cerca del objeto no visible.
La presente invención es particularmente valiosa en el área técnica de la localización de agujeros, particularmente, aunque no exclusivamente, en el campo técnico anteriormente mencionado, es decir en el ajuste de un revestimiento metálico opaco sobre miembros de soporte subyacentes en la construcción de aeronaves. Aunque es teóricamente posible detectar la presencia de un agujero en un larguero o montante subyacente, porque las propiedades físicas del agujero difieren de las del material circundante que define el agujero, los detectores apropiados pueden ser caros y la calibración y alineación normalmente necesaria de un conjunto de estos últimos pueden ser complejas. Sin embargo, en esta aplicación particular del procedimiento de la presente invención, un enfoque sencillo y altamente eficaz es poner un imán en el propio agujero, o localizar uno respecto de los detectores de efecto Hall y localizar un material ferromagnético, por ejemplo un disco de hierro dulce, en el agujero.
Las aleaciones convencionales usadas en la construcción de aeronaves son predominantemente aleaciones de aluminio que no son ferromagnéticas, por lo tanto el uso de un pequeño imán cilíndrico permite obtener señales muy claras y definidas procedentes de un conjunto de detectores de efecto Hall, incluso si el revestimiento es espeso, es decir de hasta 70 mm de espesor. Otros materiales pueden ser incluso más espesos, por ejemplo los materiales compuestos de fibra de carbono de 70 mm o más de espesor.
Como se ha señalado anteriormente, el objeto a localizar detrás del revestimiento opaco es un agujero en el larguero. Sin embargo, el objeto puede ser, por ejemplo, un imán situado respecto de un larguero (no perforado) usando una plantilla apropiada de posicionamiento, de manera que cuando, por ejemplo, se perfora un agujero usando la guía de mecanizado, se perfora a través tanto del revestimiento como del larguero, pero en la posición deseada del larguero.
El conjunto de detectores es, por regla general, un conjunto simétrico alrededor de la guía de mecanizado. El número y el posicionamiento de los detectores en el conjunto se pueden variar dependiendo del grado de precisión requerido, así como del tipo de detector. Un enfoque particularmente preferido es la utilización... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para localizar un objeto que se encuentra detrás de una superficie opaca haciendo el objeto no visible, que comprende proporcionar en proximidad al objeto un campo magnético de fuerza variable, 5 detectar la fuerza del campo magnético en una pluralidad de posiciones respecto del objeto usando un conjunto de detectores magnéticos de efecto Hall, estando el conjunto de detectores de efecto Hall asociados geométricamente a una guía de mecanizado, de tal manera que la guía de mecanizado y el conjunto de detectores se posicionan fijamente el uno respecto del otro, interrogar los detectores para determinar el valor de la fuerza de campo en al menos la mayoría de los detectores, analizar las respuestas de los detectores para determinar el desplazamiento 10 entre el objeto y la guía de mecanizado, y desplazar el conjunto y la guía de mecanizado a una posición en la cual el desplazamiento es mínimo, de tal manera que una vez que la guía de mecanizado se sitúa adyacente a la superficie en dicho punto de la superficie inmediata y centralmente recubriendo el objeto en cuestión, la posición del conjunto y la guía de mecanizado se fija usando medios de fijación para garantizar que dicha posición se fija durante una operación mecánica, caracterizado porque dicha fijación se realiza bloqueando el conjunto de en la superficie a través de ventosas de vacío en uno de los dos niveles de la fuerza de sujeción, un nivel que proporciona una fuerza de sujeción suficiente para fijar el conjunto y la guía de mecanizado a la superficie con suficiente holgura para la realización de dicho desplazamiento, y un nivel de sujeción más resistente en el que el conjunto y la guía de mecanizado se sujetan de forma firme básicamente en una posición fija contra la superficie opaca.
2. Un procedimiento según la reivindicación 1, en el que el objeto es un agujero respecto del cual se sitúa un imán o un cuerpo de material ferromagnético.
3. Aparato para localizar un objeto no visible posicionado detrás de una superficie opaca, un objeto que tiene en su proximidad un campo magnético de fuerza variable, dicho aparato comprende medios para generar una 25 campo magnético de fuerza variable, un elemento de base adaptado para colocarse sobre o contra la superficie, medios en el miembro base que definen una guía de mecanizado, un conjunto de detectores de efecto Hall situados respecto de la guía de mecanizado, medios para recoger y analizar las salidas de al menos algunos de los detectores para proporcionar una indicación de la variación del campo magnético asociado al objeto respecto de la posición del miembro base, y para proporcionar una indicación suplementaria de que la guía de mecanizado está 30 situada adyacente a la superficie en dicho punto de la superficie que recubre inmediata y centralmente el objeto en cuestión, y medios de fijación adaptados para bloquear la posición del miembro base y del objeto el uno respecto del otro una vez que dicha indicación suplementaria se ha proporcionado, de manera que la posición del miembro base se fija durante una operación mecánica, caracterizado porque dicho medio de fijación comprende ventosas de vacío para bloquear el miembro base sobre la superficie y es operable para proporcionar dos niveles de fuerza de
sujeción, un nivel que proporciona una fuerza de sujeción suficiente para fijar el miembro base a la superficie con suficiente holgura para desplazar dicho conjunto y la guía de mecanizado, y un nivel de sujeción más resistente en el que el miembro base se sujeta de forma firme básicamente en una posición fija contra la superficie opaca.
4. Aparato según la reivindicación 3, en el que el miembro base está adaptado para ser desplazado a 40 través de la superficie para permitir que la guía de mecanizado se alinee con el objeto.
5. Aparato según la reivindicación 3 ó 4, en el que los medios de análisis incluyen medios de visualización adaptados para indicar la localización del objeto respecto del conjunto de detectores, y por consiguiente para indicar cuando el conjunto está posicionado con la guía de mecanizado asociada al mismo,
situada lo más cerca del objeto no visible.
6. Aparato según una cualquiera de las reivindicaciones 3 a 5, en el que el conjunto de detectores de efecto Hall es un conjunto cruciforme.
7. Aparato según una cualquiera de las reivindicaciones 3 a 6, en el que la visualización de señales es una pantalla plana controlada por ordenador adaptada para representar de manera aproximadamente simbólica la localización del objeto y la localización de la guía de mecanizado.
Patentes similares o relacionadas:
Método para la configuración del mandril de una remachadora para elementos de remache ciegos y remachadora, del 27 de Mayo de 2020, de HONSEL Distribution GmbH & Co: Método para la configuración de una remachadora manual , accionada por un accionamiento eléctrico , para la colocación de elementos de remache ciegos , presentando la […]
Procedimiento para la unión de al menos dos componentes, del 29 de Abril de 2020, de DAIMLER AG: Procedimiento para la unión de un primer componente al menos a un segundo componente mediante al menos un elemento de ensamblaje que se inserta […]
Remachadora manual y método para su configuración, del 6 de Noviembre de 2019, de VVG-Befestigungstechnik GmbH & Co. KG: Método para la configuración de una remachadora manual provista de un accionamiento eléctrico para colocar elementos de remache ciego en un taladro de alojamiento […]
Procedimiento y dispositivo para colocar un tornillo, del 9 de Octubre de 2019, de Weber Schraubautomaten GmbH: Procedimiento para colocar un tornillo especialmente un tornillo formador de agujero por fluencia, en el que se acciona el tornillo […]
Procedimiento y aparato para la inspección de unión de materiales, del 2 de Octubre de 2019, de Comau LLC: Un procedimiento para realizar secuencialmente una pluralidad de operaciones de unión, comprendiendo el procedimiento: posicionar un dispositivo […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Método de control de calidad incorporado al proceso durante un ensamblaje de taladrado-llenado, del 1 de Julio de 2019, de THE BOEING COMPANY: Un método para ensamblar una estructura , comprendiendo dicho método: localizar una posición en un apilamiento vertical de ensamblaje donde debe instalarse un […]
Sistema de instalación de un elemento de sujeción inteligente, del 2 de Octubre de 2018, de THE BOEING COMPANY: Un método de instalación de un elemento de sujeción que comprende: proporcionar dos componentes ; identificar una ubicación para instalar un elemento de sujeción […]