PROCEDIMIENTO Y APARATO PARA ESTIMAR LA LOCALIZACIÓN Y ORIENTACIÓN DE OBJETOS DURANTE LA FORMACIÓN DE IMÁGENES POR RESONANCIA MAGNÉTICA.
Un procedimiento para determinar la localización y la orientación instantánea de un objeto (30) que se mueve a través de un espacio tridimensional dentro del espacio de formación de imágenes de un aparato de IRM (40) durante la operación del citado aparato de formación de imágenes por resonancia magnética,
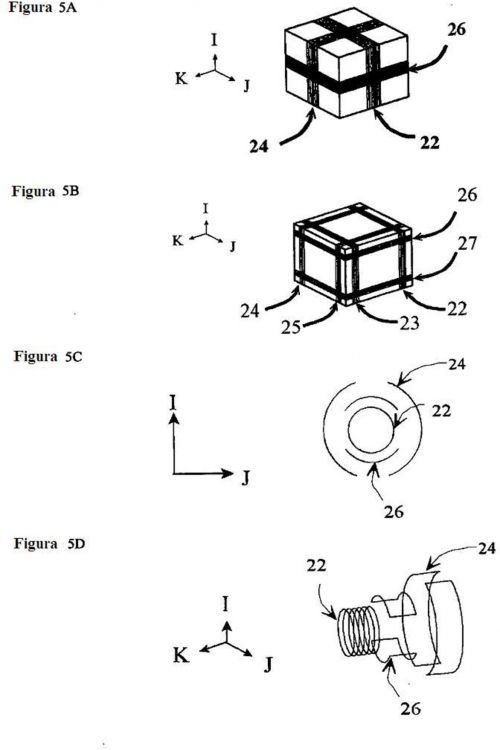
que se caracteriza porque el procedimiento comprende - proporcionar un conjunto de bobinas (20) que incluye una pluralidad de al menos tres bobinas de detección (22, 24, 26) que tienen ejes de orientación conocida unos con respecto a los otros, siendo mutuamente ortogonales los citados ejes, unos con respecto a los otros, estando conectado o integrado el conjunto de bobinas (20) en el citado objeto (30) , - medir los valores instantáneos de los potenciales eléctricos (700) inducidos en la citada pluralidad de bobinas de detección (22, 24, 26) por la activación de las bobinas de gradiente (43) del citado aparato de formación de imágenes por resonancia magnética (40) durante la operación del citado aparato de formación de imágenes por resonancia magnética (40), y - calcular la localización y la orientación instantánea del citado objeto (30) dentro del citado espacio comparando los citados valores instantáneos medidos de los potenciales eléctricos (700) con los mapas tridimensionales conocidos de la magnitud y la dirección de los campos magnéticos generados dentro del citado espacio de formación de imágenes por la citada activación de las bobinas de gradiente (43), la citada etapa de comparar haciendo uso de la orientación relativa conocida de la citada pluralidad de bobinas de detección (22, 24, 26)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US1999/020216.
Solicitante: ROBIN MEDICAL INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3101 NORTHBROOKE DRIVE BALTIMORE, MD 21208 ESTADOS UNIDOS DE AMERICA.
Inventor/es: NEVO,Erez.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Septiembre de 1999.
Clasificación PCT:
- G01R33/28 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 33/00 Dispositivos o aparatos para la medida de valores magnéticos. › Detalles de los aparatos previstos en los grupos G01R 33/44 - G01R 33/64.
Clasificación antigua:
- A61B5/05 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Detección, medida o registro para diagnóstico por medio de corrientes eléctricas o campos magnéticos; Medida mediante microondas u ondas de radio (pletismografía de impedancia A61B 5/0295; medición del movimiento de todo el cuerpo o partes del mismo A61B 5/11; detección, medición o registro de señales bioeléctricas o biomagnéticas del cuerpo o partes del mismo A61B 5/24).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Campo de la invención
La invención se refiere a la metodología y aparato para determinar la localización y orientación de un objeto, por ejemplo, un dispositivo médico, que se encuentra dentro o fuera de un cuerpo, mientras el cuerpo está siendo explo-rado con formación de imágenes por resonancia magnética (IRM). Más específicamente, la invención permite la estima-5 ción de la localización y orientación de los diferentes dispositivos (por ejemplo, catéteres, instrumentos de cirugía, agu-jas de biopsia, etc.) mediante la medición de voltajes inducidos por campos magnéticos variables en el tiempo en un conjunto de bobinas en miniatura. Tales campos magnéticos variables en el tiempo son generados por un escáner de IRM durante su operación normal.
Antecedentes de la invención 10
Procedimientos mínimamente invasivos: los procedimientos diagnósticos o de intervención mínimamente inva-sivos requieren una visualización visual directa o formación de imágenes indirecta del campo de operación y la determi-nación de la localización y orientación del dispositivo operativo. Por ejemplo, las intervenciones laparoscópicas son controladas por la visualización directa del campo operativo con endoscopios rígidos, mientras que los endoscopios flexibles son de uso general para los procedimientos de diagnóstico y de intervención en el interior del tracto gastro - 15 intestinal. Los catéteres vasculares son manipulados y maniobrado por el operador, con formación de imágenes de rayos X en tiempo real para presentar la localización y la orientación del catéter. La formación de imágenes por ultraso-nidos y los nuevos escáneres de IRM y TC en tiempo real se usan para guiar los procedimientos de diagnóstico (por ejemplo, aspiración y biopsia) y las intervenciones terapéuticas (por ejemplo, ablación, suministro local de medicamen-tos) en objetivos profundos. Aunque los ejemplos anteriores proporcionan una visualización del campo de operación y 20 del dispositivo ya sea directa (óptica) o indirectamente (formación de imágenes), otro enfoque se basa en la detección remota del dispositivo con medios mecánicos, ópticos o electromagnéticos para determinar la localización y la orienta-ción del dispositivo en el interior del cuerpo.
Estereotaxia: la estereotaxia asistida por ordenador es una técnica valiosa para la realización de procedimien-tos diagnósticos y de intervención, más típicamente en el cerebro. El concepto detrás de la técnica es tener mediciones 25 en tiempo real de la localización del dispositivo en el mismo sistema de coordenadas como una imagen del campo de operación. La localización actual del dispositivo y su trayectoria futura se presentan en tiempo real sobre la imagen y proporcionan al operador una información de retorno para manipular el dispositivo con un daño mínimo a los órganos. Durante la estereotaxia tradicional, el paciente lleva un casco especial en forma de halo, que proporciona el sistema de coordenadas común, y se realizan exploraciones por CT o IRM para crear una imagen computarizada tridimensional que 30 proporciona la localización exacta del objetivo (por ejemplo, un tumor) en relación con el casco. El dispositivo está co-nectado mecánicamente al casco y los sensores proporcionan su localización en relación con el casco. Cuando se utili-za esta técnica para realizar una biopsia o una cirugía mínimamente invasiva del cerebro, guía al cirujano para que determine donde hacer un pequeño agujero en el cráneo para llegar al objetivo. Una tecnología más nueva es la técnica sin casco, que utiliza un bastoncillo de navegación sin casco (por ejemplo, véase el documento de Nitin Patel y David 35 Sandeman, "Un Dispositivo de Guiado de Trayectoria Simple que Ayuda en la Biopsia a Mano Libre y Guiada por Ima-gen Interactiva de Objetivos Intracraneales Pequeños y Profundos", Comp. Aid Surg 2:186 - 192, 1997). En esta técnica, el sistema sensor remoto (por ejemplo, fuentes de luz y sensores) proporciona la localización en tiempo real del disposi-tivo con respecto al sistema de coordenadas de la imagen. Sin embargo, tanto la estereotaxia como las técnicas sin casco están limitadas típicamente a la utilización de dispositivos rígidos tales como agujas o fórceps de biopsia, puesto 40 que su operación adecuada requiere fijaciones mecánicas o bien una línea de visión entre las fuentes de luz y los sen-sores.
Detección electromagnética remota: Las nuevas técnicas de detección remota se basan en el electromagne-tismo. Por ejemplo, la técnica de Bladen y Anderson (WO 94/04938) es una metodología de seguimiento electromagné-tico activo que requiere el uso de un generador o generadores de campos electromagnéticos para determinar la locali-45 zación y la orientación de un sensor (Página 3, líneas de 17 - 36; Página 4, línea 24 hasta Página 5, línea 9). Esta me-todología no puede ser utilizada directamente en la IRM puesto que la aplicación de un campo electromagnético externo crea un nivel inaceptable de artefactos de imagen. Estos artefactos pueden ser evitados intercalando la etapa de segui-miento a la etapa de adquisición de imágenes , lo que requiere una modificación de las secuencias de impulsos de la IRM y alargar el tiempo de la formación de imágenes . También requiere la modificación mecánica del escáner, para 50 añadir los generadores de campo en la estructura del escáner. La adición de elementos conductores al escáner (las bobinas de los generadores) puede dar lugar a artefactos sustanciales debido a la creación de corrientes de Foucault y pueden crear interferencias electromagnéticas con el escáner.
El documento de Acker et al (patente norteamericana número 5.558.091) desvela un procedimiento y aparato para determinar la posición y la orientación de un dispositivo en el interior del cuerpo. Este procedimiento utiliza campos 55 magnéticos generados por bobinas de Helmholtz, y un conjunto de sensores ortogonales para medir los componentes de estos campos y para determinar la posición y la orientación a partir de estas medidas. La medición de los componen-tes del campo magnético se basa en el efecto Hall y requiere corrientes de excitación en los sensores con el fin de ge-nerar las señales medidas. La técnica requiere un control de los campos magnéticos externos y campos de régimen
permanente u oscilantes, para que los voltajes inducidos alcancen un estado de equilibrio. Estos requisitos impiden, o complican en gran medida, el uso de esta técnica con los campos magnéticos generados por el sistema IRM y requiere la adición de un conjunto dedicado de bobinas para generar los campos magnéticos requeridos.
Un enfoque diferente para la detección remota de la localización es desvelado por el documento de Pfeifer et al. (patente norteamericana número 5.042.486) y es utilizado adicionalmente por Ben-Haim para la formación de imágenes 5 intracorporal (patente norteamericana número 5.391.199). Su tecnología se basa en generar señales débiles de radio-frecuencia (RF) desde tres transmisores diferentes, recibir las señales por medio de una antena de RF en el interior del dispositivo, y calcular las distancias desde los transmisores, las cuales definen la localización espacial del dispositivo. Al igual que con la metodología anterior, la aplicación de la tecnología a la IRM es problemática debido a la utilización simultánea de señales de RF en la exploración por RM. Las dificultades potenciales son el calentamiento de la antena 10 de recepción en el dispositivo por la excitación de gran amplitud de las transmisiones de RF del escáner de IRM y arte-factos en la imagen de RM.
Dumoulin y sus colegas desvelan otro enfoque para determinar la localización de un dispositivo, utilizando una bobina de recepción pequeña que es sensible a la señal de RF emitida en posición cercana durante el proceso de for-mación de imágenes por RM (Dumoulin CL, Darro RD, Souza SP, "Seguimiento por Resonancia Magnética" en Inter-15 ventional MR, editada por Jolesz FA y Young IY, Mosby, 1998; US -A- 5.318.025). En el documento US- A - 5.318.025, se describe un procedimiento para determinar la localización y la orientación instantáneas de un objeto que se mueve por un espacio tridimensional en el espacio de formación de imágenes de un aparato de formación de imágenes por resonancia magnética de acuerdo con el preámbulo de la reivindicación 1.
Un aparato para determinar la localización y la orientación instantáneas de un objeto que se mueve por un es-20 pacio tridimensional en el espacio de formación de imágenes de un aparato de formación de imágenes por...
Reivindicaciones:
1. Un procedimiento para determinar la localización y la orientación instantánea de un objeto (30) que se mueve a través de un espacio tridimensional dentro del espacio de formación de imágenes de un aparato de IRM (40) durante la opera-ción del citado aparato de formación de imágenes por resonancia magnética, que se caracteriza porque el procedimien-to comprende 5
- proporcionar un conjunto de bobinas (20) que incluye una pluralidad de al menos tres bobinas de detección (22, 24, 26) que tienen ejes de orientación conocida unos con respecto a los otros, siendo mutuamente ortogonales los citados ejes, unos con respecto a los otros, estando conectado o integrado el conjunto de bobinas (20) en el citado objeto (30) ,
- medir los valores instantáneos de los potenciales eléctricos (700) inducidos en la citada pluralidad de bobinas 10 de detección (22, 24, 26) por la activación de las bobinas de gradiente (43) del citado aparato de formación de imágenes por resonancia magnética (40) durante la operación del citado aparato de formación de imágenes por resonancia magnética (40), y
- calcular la localización y la orientación instantánea del citado objeto (30) dentro del citado espacio comparando los citados valores instantáneos medidos de los potenciales eléctricos (700) con los mapas tridimensionales co-15 nocidos de la magnitud y la dirección de los campos magnéticos generados dentro del citado espacio de forma-ción de imágenes por la citada activación de las bobinas de gradiente (43), la citada etapa de comparar hacien-do uso de la orientación relativa conocida de la citada pluralidad de bobinas de detección (22, 24, 26).
2. El procedimiento de la reivindicación 1, que se caracteriza porque la citada etapa de medir incluye, además, la etapa de identificar una pluralidad de activaciones (712) de los campos de gradiente magnético del citado aparato de forma-20 ción de imágenes por resonancia magnética (40), en el que la citada etapa de identificar proporciona la temporización y la amplitud de las activaciones de una única bobina de gradiente (43) o activaciones combinadas de dos o tres bobinas de gradiente (43) del citado aparato de formación de imágenes por resonancia magnética (40), y en el que la citada etapa de calcular comprende:
i. calcular el vector de voltaje para cada bobina de detección (22, 24, 26) con una magnitud igual a los citados po-25 tenciales eléctricos inducidos (700) generados en la citada bobina de detección (22, 24, 26) y la dirección defini-da por el vector unitario perpendicular al plano de la citada bobina de detección (22, 24, 26);
ii. calcular el vector suma de voltajes por la suma vectorial de los citados vectores de voltaje en las diferentes bobi-nas de detección para cada una de las, citadas activaciones de los campos de gradiente del escáner de IRM;
iii. calcular (716) las magnitudes de todos los citados vectores de suma de voltajes y los ángulos entre todos los pa-30 res posibles de los citados vectores de suma de voltajes;
iv. almacenar en la memoria los mapas de campo magnético de referencia de cada una de las tres bobinas de gra-diente (43) del citado aparato de formación de imágenes por resonancia magnética (40) para el espacio de for-mación de imágenes del citado aparato de formación de imágenes por resonancia magnética (40);
v. estimar la localización de la sonda mediante la aplicación (718) de un algoritmo de búsqueda que compara las ci-35 tadas magnitudes calculadas y los ángulos de los citados vectores de suma de voltajes con los mapas del campo magnético de referencia conocidos y los mapas del campo magnético de referencia 3 conocido usando la orien-tación relativa conocida de las bobinas de detección (22, 24, 26) en el citado conjunto de bobinas, y
vi. estimar la orientación del sensor (20) por un procedimiento de optimización iterativo para determinar los tres ángulos de rotación que transforman, en la localización del dispositivo estimada en el etapa (v), desde un siste-40 ma de coordenadas local, conectado al objeto al sistema de coordenadas de referencia de IRM definido por las citadas bobinas de gradiente,
en el que la etapa de estimar la orientación implica
procesar (720) los citados potenciales eléctricos inducidos (700) generados en las citadas bobinas de detección (22, 24, 26), junto con los mapas de campo magnético de referencia conocidos y la orientación relativa conocida 45 de las bobinas de detección (22, 24, 26) en el citado conjunto de bobinas.
3. El procedimiento se acuerdo con la reivindicación 1, que se caracteriza porque el citado conjunto de bobinas incluye tres pares de bobinas de detección (22 - 27), en el que una bobina de detección (22 - 27) en cada par tiene la misma orientación que la otra bobina de detección (22 - 27) en el par respectivo, y en el que cada par de bobinas de detección (22 - 27) tiene una orientación diferente de los otros pares de bobinas de detección (22 - 27). 50
4. El procedimiento de acuerdo con la reivindicación 1, que se caracteriza porque el citado conjunto de bobinas incluye una bobina de detección cilíndrica y dos pares de bobinas de detección orientadas ortogonalmente una con respecto a la otra y situadas ortogonalmente con respecto a la bobina de detección cilíndrica.
5. El procedimiento de acuerdo con la reivindicación 1, que se caracteriza porque el citado objeto (30) es un instrumento médico en movimiento en el cuerpo de una persona con propósitos de diagnóstico o de tratamiento médicos. 55
6. Aparato para determinar la localización y la orientación instantáneas de un objeto (30) que se mueve a través de un espacio tridimensional en el espacio de formación de imágenes de un aparato de formación de imágenes por resonancia magnética (40) durante la operación del citado aparato de formación de imágenes por resonancia magnética (40), que se caracteriza porque comprende:
un conjunto de bobinas (20) que incluye una pluralidad de al menos tres bobinas de detección (22, 24, 26), que 5 tienen ejes de orientación conocida unos con respecto a los otros, siendo los citados ejes mutuamente ortogona-les unos con respecto a los otros, el conjunto de bobinas (20) está conectado o integrado en el citado objeto (30),
un medio para medir los valores instantáneos de los potenciales eléctricos (700) inducidos en la citada pluralidad de bobinas de detección (22, 24, 26) por la activación de las bobinas de gradiente (43) del citado aparato de for-mación de imágenes por resonancia magnética (40) durante la operación del citado aparato de formación de 10 imágenes por resonancia magnética (40), y
un procesador (10) para calcular la localización y la orientación instantáneas del citado objeto (30) dentro del ci-tado espacio comparando los citados valores instantáneos medidos de los potenciales eléctricos (700) con los mapas tridimensionales conocidos de la magnitud y de la dirección de los campos magnéticos generados dentro del citado espacio de formación de imágenes por la citada activación de las bobinas de gradiente (43), haciendo 15 uso la citada comparación de la orientación relativa conocida de la citada pluralidad de bobinas de detección (22, 24, 26).
7. El aparato de la reivindicación 6, que se caracteriza porque el citado medio de medición incluye, además, un medio para identificar una pluralidad de activaciones de campos de gradiente magnético del citado aparato de formación de imágenes por resonancia magnética (40), en el que el citado medio para identificar proporciona la temporización y la 20 amplitud de las activaciones de una única bobina de gradiente o activaciones combinadas de dos o tres bobinas de gradiente (43) del citado aparato de formación de imágenes por resonancia magnética (40), y porque el citado procesa-dor (10) comprende además:
i. un medio para calcular el vector de voltaje para cada bobina de detección (22, 24, 26) con una magnitud igual a los citados potenciales eléctricos inducidos generados en la citada bobina de detección (22, 24, 26) y la direc-25 ción definida por el vector unitario perpendicular al plano de la citada bobina de detección (22, 24, 26);
ii. un medio para calcular el vector de la suma de voltajes por la suma vectorial de los citados vectores de voltaje en las diferentes bobinas de de detección (22, 24, 26) para cada una de las citadas activaciones de los campos de gradiente del escáner de IRM;
iii. un medio para calcular las magnitudes de todos los citados vectores de suma de voltajes y los ángulos entre 30 todos los pares posibles de los citados vectores de suma de voltajes;
iv. memoria para almacenar los mapas de campo magnético de referencia de cada una de las tres bobinas de gradiente (43) del citado aparato de formación de imágenes por resonancia magnética (40) para el espacio de formación de imágenes del citado aparato de formación de imágenes por resonancia magnética (40);
v. un medio para estimar la localización de la sonda (20) mediante la aplicación de un algoritmo de búsqueda que 35 compara las citadas magnitudes y los ángulos calculados de los citados vectores de suma de voltajes con los mapas de campo magnético de referencia conocidos y los mapas de campo angular de referencia conocidos utilizando la orientación relativa conocida de las bobinas de detección (22, 24, 26) en el citado conjunto de bo-binas, y
vi. un medio para estimar la orientación del sensor (20) por un procedimiento de optimización iterativo con el fin 40 de determinar los tres ángulos de rotación que transforman, en la localización del dispositivo estimada por el ci-tado medio para estimar la localización del sensor, desde un sistema de coordenadas conectado al objeto, lo-cal, a un sistema de coordenadas de referencia de IRM definido por las citadas bobinas de gradiente, proce-sando los citados potenciales eléctricos inducidos generados en las citadas bobinas de detección (22, 24, 26), junto con los mapas magnéticos de referencia conocidos y la orientación relativa conocida de las bobinas de 45 detección ( 22, 24, 26) en el citado conjunto de bobinas.
8. El aparato de acuerdo con la reivindicación 6, que se caracteriza porque el citado conjunto de bobinas (20) incluye tres pares de bobinas de detección (22 - 27), en el que una bobina de detección en cada par tiene la misma orientación que la otra bobina de detección (22 - 27) en el par respectivo, y en el que cada par de bobinas de detección (22 - 27) tiene una orientación diferente de los otros pares de bobinas de detección (22 - 27). 50
9. El aparato de acuerdo con la reivindicación 6, que se caracteriza porque el citado conjunto de bobinas incluye una bobina de detección cilíndrica y dos pares de bobinas de detección orientadas ortogonalmente una con respecto a la otra y colocados ortogonalmente con respecto a la bobina de detección cilíndrica.
10. El aparato de acuerdo con la reivindicación 6, que se caracteriza porque el citado objeto (30) es un instrumento médico en movimiento en el cuerpo de una persona con fines de diagnóstico o tratamiento médicos, y en el que el cita-55 do sensor (20) está adherido, o integrado, en el citado instrumento médico.
Patentes similares o relacionadas:
Procedimiento para optimizar la predeterminación del perfil de tiempo de la concentración de un agente de contraste en imágenes de diagnóstico mediante la utilización de un sistema de resonancia magnética, del 20 de Marzo de 2019, de Bayer Pharma Aktiengesellschaft: Un procedimiento para predeterminar un perfil de tiempo de la concentración del agente de contraste en una posición en un vaso sanguíneo de un paciente en el contexto […]
Método de obtención de imágenes de la función metabólica, del 18 de Septiembre de 2018, de Aurum Biosciences Limited: Un método de obtención de imágenes de la función metabólica en un área objetivo de un organismo mediante el uso de imágenes de resonancia […]
Inyector con sistema de motor piezoeléctrico con ajuste de la forma de onda, del 6 de Septiembre de 2018, de LIEBEL-FLARSHEIM COMPANY LLC: Un inyector de potencia para formación de imágenes por resonancia magnética, que comprende: un accionador de émbolo de jeringuilla ; un motor piezoeléctrico […]
Procedimiento para la producción de partículas submicrométricas y su uso teranóstico en oncología con un aparato específico, del 27 de Diciembre de 2017, de MBN Nanomaterialia SpA: Procedimiento para la producción de partículas submicrométricas para el tratamiento in vivo de células tumorales, que comprende las etapas siguientes: A. tratamiento […]
APANTALLAMIENTO DE RADIOFRECUENCIA PARA EQUIPOS DE IMAGEN HÍBRIDOS, del 7 de Julio de 2016, de GENERAL EQUIPMENT FOR MEDICAL IMAGING, S.A: Un dispositivo híbrido de imagen médica PET-SPECT/MR que comprende: -al menos un cristal centelleador, y -al menos un módulo de detección de radiación […]
 Aparato de IRM combinado con cámara de campo de luz, del 26 de Febrero de 2016, de Aspect Imaging Ltd: Un aparato de IRM para proporcionar imágenes de IRM y plenópticas superpuestas, en el que dicho aparato comprende:
polos de imán para crear un campo magnético […]
Aparato de IRM combinado con cámara de campo de luz, del 26 de Febrero de 2016, de Aspect Imaging Ltd: Un aparato de IRM para proporcionar imágenes de IRM y plenópticas superpuestas, en el que dicho aparato comprende:
polos de imán para crear un campo magnético […]
 Procedimiento y dispositivo de medición para aplicaciones de resonancia magnética, del 23 de Diciembre de 2015, de UNIVERSITE CLAUDE BERNARD-LYON I: Dispositivo de medición para aplicaciones de resonancia magnética, que incluye tres ejes de mediciones (x, y, z) que corresponden al eje de […]
Procedimiento y dispositivo de medición para aplicaciones de resonancia magnética, del 23 de Diciembre de 2015, de UNIVERSITE CLAUDE BERNARD-LYON I: Dispositivo de medición para aplicaciones de resonancia magnética, que incluye tres ejes de mediciones (x, y, z) que corresponden al eje de […]
 Procedimiento y aparato para hiperpolarizar materiales para técnicas de RM potenciadas, del 29 de Julio de 2015, de GENERAL ELECTRIC COMPANY: Un sistema de polarizador para polarizar un material a usar en la formación de imágenes por resonancia magnética (RM), comprendiendo el sistema:
un contenedor […]
Procedimiento y aparato para hiperpolarizar materiales para técnicas de RM potenciadas, del 29 de Julio de 2015, de GENERAL ELECTRIC COMPANY: Un sistema de polarizador para polarizar un material a usar en la formación de imágenes por resonancia magnética (RM), comprendiendo el sistema:
un contenedor […]