Procedimiento y aparato para la determinación de posición.
Procedimiento para la determinación de la posición de un objeto móvil que comprende las siguientes etapas:
determinar la posición (Px) del objeto;
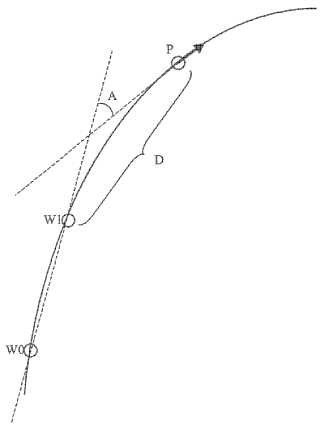
determinar la distancia actual (Dx) del objeto desde una posición anterior (Px-1) que ha sido almacenada como punto de ruta (Wx-1);
determinar una desviación actual (Ax) entre una dirección de desplazamiento actual y una dirección de desplazamiento anterior, cuya dirección de desplazamiento anterior es evaluada en base, como mínimo de, dos puntos de ruta anteriores;
comparar la distancia actual (Dx) y la desviación actual (Ax) con, como mínimo, un conjunto de parámetros (X, Y, Z) que definen criterios para almacenar una posición como nuevo punto de ruta; determinar la velocidad actual del objeto; determinar y almacenar la posición actual (Px) como nuevo punto de ruta (Wx) si los criterios se cumplen; y
repetir las etapas anteriores y almacenar un número predeterminado de últimos puntos de ruta (Wx, Wx-1, Wx-2, ...) para indicar posición y/o dirección de desplazamiento del objeto, caracterizado porque se define que los criterios se han cumplimentado si:
(1) la distancia actual (Dx) es superior al primer parámetro (X);
o bien (2a) la distancia actual (Dx) es superior al segundo parámetro (Y), de manera que Y
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2001/001730.
Solicitante: VOLVO TECHNOLOGY CORPORATION.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: JONSSON, SVEN, GUDMUNDSSON,Stefan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/28 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › con correlación de datos provenientes de varios instrumentos de navegación.
- G01S19/13 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Receptores.
- G01S19/35 G01S 19/00 […] › Detalles de construcción o detalles de hardware o de software de la cadena de procesamiento de la señal.
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G08G1/127 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › en una estación central.
PDF original: ES-2381741_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato para la determinación de posición La invención se refiere a un procedimiento y aparato para la determinación de la posición de un objeto móvil, tal como un vehículo, avión, barco, especialmente a lo largo de una trayectoria predeterminada (ruta) .
Los sistemas de navegación para determinación de posición por medio de GPS (Global Positioning System) son bien conocidos, no solamente para su aplicación en aviones y barcos, sino que tienen una importancia creciente también para la localización de la posición de vehículos.
Este objetivo requiere unidades receptoras y de evaluación de dimensiones compactas y costes razonables. Además, para reducir los tiempos de comunicación y costes de comunicación, los datos son condensados en la mayor medida posible, no obstante, esto está limitado por el hecho de que los datos tienen que ser suficientemente significativos para la determinación de la posición del vehículo con suficiente exactitud.
El documento WO 95/13594 da a conocer un dispositivo para registrar información con respecto al itinerario de un vehículo. El dispositivo comprende un receptor para recibir datos de posición del vehículo y un dispositivo de memoria para almacenar de manera continuada datos de posición, datos de tiempo de posiciones y datos que identifiquen al conductor del vehículo sobre un soporte de datos fácilmente sustituible.
El documento WO 00/34932 da a conocer un sistema de control para el seguimiento automático de las posiciones de una flota de unidades móviles. Cada unidad móvil lleva un medio de determinación de posición, un medio de proceso y un medio de transmisión para enviar la última posición de la unidad móvil a una unidad central de control a determinados intervalos. Para reducir la capacidad de transmisión requerida, los medios de proceso almacenan una serie de normas para determinar el intervalo entre la transmisión de mensajes de actualización de posición a la unidad central de control. Estas normas se basan en varios factores, tales como la dirección de desplazamiento de una unidad móvil, su localización o distancia desde otras localizaciones predeterminadas y almacenadas o una línea predeterminada que define la ruta o la exactitud de posición requerida u otras condiciones u eventos predeterminados.
El documento WO 00/10027 da a conocer un método y aparato para el control de posición para unidades móviles, en el que estas unidades transmiten datos de la posición actual a una unidad de control central periódicamente o cada vez que la unidad se ha desplazado en una distancia predeterminada. Las posiciones son mostradas sobre un mapa electrónico en una serie de formas seleccionables.
El documento US-PS 5.598.167 da a conocer un método y aparato para determinar la posición actual de un vehículo para trasmitir de manera recurrente y de forma inalámbrica los mismos a una estación remota. Para reducir el número de transmisiones, se detecta un cambio interno discreto de situación (por ejemplo, una distancia recorrida predeterminada) en el vehículo y se efectúa la transmisión después de la detección de dicha situación.
El documento WO 98/27524 da a conocer un método para informar a un centro de información con respecto a la ruta recorrida por un vehículo, en el que se definen puntos de soporte a lo largo de la trayectoria del vehículo en varias localizaciones en base a ciertos criterios almacenados en el vehículo y se transmite información referente a estos puntos de soporte al centro de información.
Es un objetivo de la invención dar a conocer un procedimiento y aparato para la determinación de la posición del objeto móvil que es muy simple de implementar y que requiere solamente un gasto reducido en equipo de hardware.
Es otro objetivo de la invención dar a conocer un procedimiento y aparato para la determinación de la posición de un vehículo móvil que permite una determinación exacta de su posición, incluso con respecto a dos pistas paralelas de una sola vía en una carretera.
Otro objetivo de la invención consiste en dar a conocer un simple procedimiento y aparato para seleccionar datos de posición de un objeto móvil como puntos de la ruta a almacenar y visualizar, de manera que un número reducido de puntos de la ruta describen una ruta recorrida con mejor exactitud y error reducido, especialmente en el caso de recorridos con diferentes curvaturas y recorridos rectos, así como diferentes velocidades del objeto.
Estos y otros objetivos son solucionados por un procedimiento, según la reivindicación 1, y un aparato, según la reivindicación 11.
De esta manera, se realiza la decisión con respecto a almacenar datos de posición de un (nuevo) punto de la ruta en base y dependiendo de puntos de la ruta previamente almacenados y no en todos los datos de posición anteriores. Utilizando (solamente) los puntos de la ruta para indicar y/o visualizar la ruta recorrida, se consigue una mayor exactitud de la descripción de la ruta recorrida con un volumen de datos reducido.
Las reivindicaciones dependientes están dirigidas a realizaciones ventajosas de las soluciones, según las reivindicaciones 1 y 11, respectivamente.
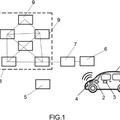
Otros detalles, características y ventajas quedarán evidentes de la siguiente descripción de una realización preferente de la invención con referencia a los dibujos, en los que se muestran: La figura 1, un diagrama esquemático del entorno de un procedimiento y aparato, según la invención; La figura 2, un diagrama de bloques esquemático de un aparato, de acuerdo con la presente invención; La figura 3, una vista esquemática para explicar la selección de puntos de la ruta; y La figura 4, un gráfico de una ruta de desplazamiento de un vehículo en la que se han indicado los puntos de la ruta seleccionados.
Un entorno preferente de un procedimiento y aparato, según la invención, se muestra en la figura 1. Comprende un centro 10 de servicio de clientes con un operador 11. Como mínimo, un vehículo 20, como mínimo, un barco o embarcación 24, así como uno o varios equipos estacionarios 25, tales como una instalación o planta remota comunican con el centro de servicio 10 con intermedio de una red de comunicación celular 30, tal como GSM (norma europea) o AMPS (norma US) y/o una red de comunicación por satélite 31, destinados ambos a intercambiar información, datos y comunicación de voz, cada uno en ambas direcciones. Se pueden transmitir incluso programas de software en caso necesario.
Vehículos de asistencia de emergencia 22 y un vehículo 23 de asistencia a lo largo de la carretera comunican con el centro de servicio 10 de manera similar o de cualquier otra manera y son activados por el centro de servicio en caso de necesidad por uno de los objetos 20, 24, 25. La posición de cada objeto se puede detectar por medio del sistema de posicionamiento global (GPS) 40.
Los vehículos, especialmente camiones, que son guiados o controlados por el centro de servicio están dotados de medios de transmisión apropiados para transmitir datos de posición al centro de servicio.
En caso de accidente o de emergencia, si se necesita un vehículo de asistencia 23, el conductor del mismo debe saber con exactitud la posición real del vehículo que está pidiendo ayuda, especialmente si este vehículo estaba circulando en una autovía o carretera con pistas separadas para cada dirección. La indicación de la posición promedio de GPS no es habitualmente suficientemente satisfactoria para permitir la distinción entre dos pistas paralelas de una vía (una para cada dirección) y una indicación de cuál es la pista en la que se desplaza el vehículo objetivo.
El procedimiento y aparato, según la invención, permite esta distinción y la indicación al determinar no solamente la posición, sino también la dirección de movimiento del objeto. Esto se consigue en base a una serie de posiciones previamente localizadas que son seleccionadas bajo ciertos criterios y almacenadas en una memoria correspondiente como puntos de la ruta y que son transmitidos en caso necesario al centro de servicio o a un vehículo de asistencia, de manera que se pueden determinar la posición real del objeto, así como su ruta de desplazamiento antes de dicha posición y como consecuencia su dirección de movimiento, lo que permite la decisión de cuál es la pista sobre la que se encuentra el objetivo.
La posición del objetivo es determinada, por ejemplo, a cada segundo de manera conocida evaluando señales... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación de la posición de un objeto móvil que comprende las siguientes etapas:
determinar la posición (Px) del objeto; determinar la distancia actual (Dx) del objeto desde una posición anterior (Px-1) que ha sido almacenada como punto de ruta (Wx-1) ; determinar una desviación actual (Ax) entre una dirección de desplazamiento actual y una dirección de desplazamiento anterior, cuya dirección de desplazamiento anterior es evaluada en base, como mínimo de, dos puntos de ruta anteriores; comparar la distancia actual (Dx) y la desviación actual (Ax) con, como mínimo, un conjunto de parámetros (X, Y, Z) que definen criterios para almacenar una posición como nuevo punto de ruta; determinar la velocidad actual del objeto; determinar y almacenar la posición actual (Px) como nuevo punto de ruta (Wx) si los criterios se cumplen; y repetir las etapas anteriores y almacenar un número predeterminado de últimos puntos de ruta (Wx, Wx-1, Wx-2, ...) para indicar posición y/o dirección de desplazamiento del objeto, caracterizado porque se define que los criterios se han cumplimentado si:
(1) la distancia actual (Dx) es superior al primer parámetro (X) ; o bien (2a) la distancia actual (Dx) es superior al segundo parámetro (Y) , de manera que Y<X, y (2b) la desviación (Ax) entre la dirección de desplazamiento actual y la dirección establecida por la conexión de los dos últimos puntos de ruta (Wx-1, Wx-2) es superior que el tercer parámetro (Z) , y (2c) la velocidad actual del objeto es superior a una velocidad mínima predeterminada (S) .
2. Procedimiento, según la reivindicación 1, en el que la velocidad mínima (S) está ajustada a 5 km/h.
3. Procedimiento, según la reivindicación 1, que comprende las siguientes etapas: comparar la velocidad actual con, como mínimo, una velocidad límite (L1; L2;...) ; aplicar uno de una serie de juegos predeterminados de parámetros [ (X1, Y1, Z1) ; (X2, Y2, Z2) ;...] dependiendo de cuál de los límites de velocidad (L1; L2;...) se encuentra por debajo o por encima de la velocidad actual del objeto.
4. Procedimiento, según una de las reivindicaciones 1 a 3, que comprende la siguiente etapa: transmitir el número predeterminado de últimos puntos de ruta (Wx, Wx-1, Wx-2, ...) en un evento predeterminado.
5. Procedimiento, según una de las reivindicaciones 1 a 4, en el que un primer conjunto de parámetros (X1, Y1, Z1) es fijado para velocidades del objeto por debajo de una velocidad límite (L) y un segundo juego de parámetros (X2, Y2, Z2) es fijado para velocidades del objeto por encima de una velocidad límite (L) .
6. Procedimiento, según la reivindicación 5, en el que la velocidad límite (L) es aproximadamente de 50 km/h.
7. Procedimiento, según la reivindicación 5, en el que el primer juego de parámetros está fijado en (500m, 50m, 45º) .
8. Procedimiento, según la reivindicación 5, en el que el segundo juego de parámetros está fijado en (1000m, 100m, 45º) .
9. Programa de ordenador que comprende medios de código de programa de ordenador adaptados para llevar a cabo un procedimiento, según una de las reivindicaciones 1 a 8, cuando dicho programa es utilizado en un ordenador.
10. Producto de programa de ordenador almacenado en un medio utilizable en un ordenador, que comprende medios de código de programa de ordenador para llevar a cabo un procedimiento, según una de las reivindicaciones 1 a 8, cargado en la memoria interna de un ordenador.
11. Aparato para la determinación de la posición de un objeto móvil, que comprende:
un primer medio (100) para determinar la posición actual (Px) del objeto; un segundo medio (110) para almacenar posiciones previas (Px-1, Px-2, ...) de los puntos de ruta (Wx-1, Wx-2, ...) ; y un tercer medio (120) para determinar la distancia actual (Dx) del objeto desde un punto de ruta anterior (Wx-1) , para determinar la desviación actual (Ax) entre la dirección de desplazamiento actual y una dirección de desplazamiento previa del objeto, y para determinar la velocidad actual del objeto;
caracterizado por:
cuartos medios (130) para comparar la distancia actual (Dx) y la desviación actual (Ax) con, como mínimo, un juego de parámetros (X, Y, Z) que definen criterios para almacenar una posición como nuevo punto de ruta y para comparar la velocidad actual con una velocidad mínima predeterminada (S) y si los criterios se cumplen, para almacenar la posición actual (Px) en los segundos medios (110) como nuevo punto de ruta (Wx) , en el que se define que los criterios se cumplen si:
(1) la distancia actual (Dx) es superior al primer parámetro (X) ; o bien (2a) la distancia actual (Dx) es superior al segundo parámetro (Y) de manera que Y<X; y (2b) la desviación (Ax) entre la dirección de desplazamiento actual y la dirección establecida por la conexión de los dos últimos puntos de ruta (Wx-1, Wx-2) es superior que el tercer parámetro (Z) y (2c) la velocidad actual del objeto es superior a una velocidad mínima predeterminada (S) .
12. Aparato, según la reivindicación 11, en el que:
los cuartos medios (130) están dispuestos para comparar la velocidad actual con, como mínimo, una velocidad límite (L1; L2;...) y para aplicar uno de una serie de juegos de parámetros predeterminados
Patentes similares o relacionadas:
SISTEMA DE GESTIÓN DE UNA INSTALACIÓN EN FUNCIÓN DEL NIVEL DE EFICIENCIA DE UN VEHÍCULO, del 31 de Octubre de 2019, de MAESTRO CAPITAL LIMITED: Sistema de gestión de una instalación en función del nivel de eficiencia de un vehículo que comprende: medios de determinación de la cantidad […]
 Sistema de gestión de una instalación en función del nivel de eficiencia de un vehículo, del 31 de Octubre de 2019, de MAESTRO CAPITAL LIMITED: Sistema de gestión de una instalación en función del nivel de eficiencia de un vehículo que comprende: medios de determinación de la cantidad de […]
Sistema de gestión de una instalación en función del nivel de eficiencia de un vehículo, del 31 de Octubre de 2019, de MAESTRO CAPITAL LIMITED: Sistema de gestión de una instalación en función del nivel de eficiencia de un vehículo que comprende: medios de determinación de la cantidad de […]
Provisión de servicios municipales usando dispositivos móviles y una red de sensores, del 11 de Septiembre de 2019, de Stationnement Urbain Developpements et Etudes: Un dispositivo móvil que comprende: un procesador , una memoria acoplada al procesador, un visualizador , un mecanismo de entrada […]
Determinación de viaje para administrar horarios de vehículos de tránsito, del 3 de Julio de 2019, de Global Traffic Technologies LLC: Un procedimiento de administración de horarios de vehículos de tránsito, que comprende: determinar una ubicación actual y rumbo actual de un vehículo de tránsito mediante […]
Provisión de servicios telemáticos por medio de una red de telefonía móvil, del 17 de Diciembre de 2018, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Método de control de un servidor de aplicaciones accesible por medio de una red de telefonía móvil, que comprende las siguientes etapas llevadas a cabo por un dispositivo […]
Perfeccionamiento del dispositivo electrónico para controlar rutas escolares y su funcionamiento, del 5 de Octubre de 2018, de NUNSYS, S.L: Perfeccionamiento del dispositivo electrónico para controlar rutas escolares y su funcionamiento. Constituido a partir de un dispositivo electrónico GPS/GPRS portado […]
Dispositivo electrónico para controlar rutas escolares y su funcionamiento, del 4 de Mayo de 2016, de GARRIDO SORIANO, Ángel: Dispositivo electrónico para controlar rutas escolares y su funcionamiento. Constituido a partir de un dispositivo electrónico GPS/GPRS portado por la […]
Sistema de detección para regiones bidimensionales para la detección de vehículos con GPS, del 21 de Mayo de 2014, de KAPSCH TRAFFICCOM AG: Sistema de detección para la detección de vehículos con un sistema de determinación de posición digital asistido por satélite al usar al menos una región bidimensional […]