PROCEDIMIENTO Y APARATO PARA CONTROLAR UNA SUSPENSION SEMIACTIVA.
Procedimiento para controlar un generador de fuerza controlable (13) en un sistema de suspensión controlable (12),
estando interconectado dicho sistema de suspensión controlable (12) entre un primer elemento (14, 15) y un segundo elemento (15, 14), comprendiendo dicho procedimiento las etapas que consisten en:
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2007/002033.
Solicitante: POLITECNICO DI MILANO.
Nacionalidad solicitante: Italia.
Dirección: PIAZZA LEONARDO DA VINCI 32,20133 MILANO.
Inventor/es: SAVARESI,SERGIO,MATTEO, SPELTA,CRISTIANO.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Junio de 2010.
Clasificación Internacional de Patentes:
- B60G17/015B
- B60G17/0165 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › a una condición externa, p.ej. mal estado de la vía, viento lateral.
- B60G17/018 B60G 17/00 […] › caracterizadas por la utilización de un modo de tratamiento de la señal o de un método de control específicos.
Clasificación PCT:
- B60G17/015 B60G 17/00 […] › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B60G17/0165 B60G 17/00 […] › a una condición externa, p.ej. mal estado de la vía, viento lateral.
- B60G17/018 B60G 17/00 […] › caracterizadas por la utilización de un modo de tratamiento de la señal o de un método de control específicos.
Fragmento de la descripción:
Procedimiento y aparato para controlar una suspensión semiactiva.
La presente invención se refiere a un procedimiento y a un aparato para controlar una suspensión semiactiva según, respectivamente, el preámbulo de las reivindicaciones 1 y 14.
Más en particular, la invención se refiere a un procedimiento y a un aparato para controlar la dinámica de un generador de fuerza controlable en una suspensión semiactiva.
Las suspensiones semiactivas resultan aplicables en diversos campos industriales, tales como por ejemplo la industria automovilística, motocicletas, maquinaria agrícola, vehículos ferroviarios, electrodomésticos y similares.
En la presente descripción, la expresión masa suspendida se refiere al chasis de un vehículo a motor, mientras que la expresión masa no suspendida se refiere a las ruedas de un vehículo a motor, es decir, llanta, neumático, sistema de frenado y parte de los engranajes motrices.
Se garantiza la unión entre la masa suspendida y la masa no suspendida mediante la suspensión constituida por un sistema elástico y un elemento de amortiguación, también denominado amortiguador de choques.
Debe apreciarse que una autosimplificación de este tipo también se aplica, con simples consideraciones, a cualquiera de los campos industriales mencionados anteriormente.
Como es conocido, las suspensiones pueden dividirse en los tipos siguientes:
- pasiva: constituida por muelles y amortiguadores de choques cuyos parámetros se seleccionan en la etapa de diseño por el fabricante y no pueden cambiarse; y
- semiactiva: constituida por muelles y amortiguadores de choques cuyo valor de coeficiente de amortiguación puede cambiarse mediante un sistema de control.
Debe observarse que, independientemente del tipo de suspensión seleccionado, el propósito de las suspensiones es obtener los objetivos siguientes:
- comodidad de la conducción: que está estrictamente relacionada con el aislamiento del vehículo y por lo tanto del conductor, de las irregularidades de la carretera;
- agarre: que está estrictamente relacionado con la fuerza de contacto entre el neumático y el asfalto.
Es importante observar que los objetivos de comodidad y agarre son intrínsecamente contrapuestos y por tanto, será necesario establecer un compromiso entre los dos.
De hecho, como es bien conocido por el experto en la materia, un vehículo provisto de una suspensión particularmente "suave" podrá deformarse muy rápidamente y por tanto absorber cualquier irregularidad de la carretera, pero por otra parte, es susceptible de que se pierda el contacto fácilmente entre la rueda y el asfalto reduciendo el agarre del vehículo, imposibilitando prácticamente su conducción.
Por otra parte, un vehículo provisto de una suspensión particularmente "rígida" presentará un agarre excelente frente a la desventaja del aislamiento de la carretera, es decir, en detrimento de la comodidad de la conducción.
Haciendo referencia a la figura 1, en la que se representa el espectro de aceleración de un elemento de una suspensión pasiva, por ejemplo de la masa suspendida, se observa un primer perfil 1, que corresponde a una suspensión pasiva particularmente "suave" o a un coeficiente de amortiguación mínimo Cmtext{í}n, un segundo perfil 2, que corresponde a una suspensión pasiva particularmente "rígida" o a un coeficiente de amortiguación máximo cmáx, y un tercer perfil 3, que corresponde a una suspensión pasiva de compromiso o convencional.
En particular, un tercer perfil 3 de este tipo es una de las posibles elecciones de compromiso que realizan habitualmente los fabricantes para garantizar un compromiso adecuado entre la comodidad y el agarre.
Para cumplir con esta necesidad es por lo que se han desarrollado las suspensiones semiactivas, que utilizan procedimientos o lógicas de control adecuados, implementados por un aparato de control específico, permiten mejorar tanto la comodidad de la conducción como el agarre al mismo tiempo, en comparación con las suspensiones pasivas.
Las principales diferencias encontradas entre las suspensiones semiactivas pueden identificarse en las diferentes lógicas de control o en los diferentes tipos de generadores de fuerza ajustables (o amortiguadores de choques) que pueden utilizarse.
En lo que se refiere a los procedimientos o lógicas de control, pueden desarrollarse partiendo de la base de un número finito de niveles preseleccionados por el fabricante en la etapa de diseño, por ejemplo dos niveles, tales como un nivel de "conexión" y un nivel de "desconexión", o continuos.
La figura 2 representa diversos perfiles típicos del espectro de aceleración de un elemento de una suspensión, tal como la masa suspendida, basándose en los procedimientos de control tales como cable-grúa, amortiguación accionada por aceleración (conocidos en la técnica anterior) y comparados con el perfil 3, que tal como se describió anteriormente haciendo referencia a la figura 1, corresponde a una suspensión pasiva que presenta un coeficiente de amortiguación de compromiso.
En particular, en tal figura 2, se observa un perfil 4 que representa un perfil de control de cable grúa (SH) de dos estados, normalmente "conexión" y "desconexión", y otro perfil 5 que representa otro procedimiento de control de amortiguación accionada por aceleración (ADD) de dos estados.
Tales procedimientos de control, cable-grúa y/o amortiguación accionada por aceleración, prevén en lo esencial la imposición, mediante sistemas de control adecuados, de una señal de control (por ejemplo una corriente pilotada por una unidad de control) que puede variar el coeficiente de amortiguación del amortiguador de choques, en particular entre un nivel de "conexión" y un nivel de "desconexión".
Debe observarse que el nivel de "conexión" coincide con el coeficiente de amortiguación cmáx y el nivel de "desconexión" coincide con el coeficiente de amortiguación cmtext{í}n del amortiguador de choques. Tales coeficientes cmáx y cmtext{í}n los selecciona el fabricante en la etapa de diseño de la suspensión en relación con el tipo de vehículo al que se dirige la propia suspensión.
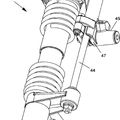
En lo que se refiere a los diferentes tipos de generadores de fuerza ajustables (o amortiguadores de choques), que presentan como característica peculiar la de variar su coeficiente de amortiguación según la señal de control, pueden distinguirse los siguientes tipos:
- amortiguadores de choques CDC (control continuo de la amortiguación), cuyo funcionamiento se basa en la variación del tamaño de los orificios que conectan la cámara superior e inferior del pistón del amortiguador de choques, es decir, es posible cambiar la velocidad a la que la suspensión vuelve a la posición de equilibrio; y
- amortiguadores de choques reológicos, cuyo funcionamiento prevé la utilización de fluidos reológicos, es decir, fluidos que representan una viscosidad variable basándose en un campo eléctrico y/o magnético adecuado (también denominados amortiguadores de choques electro-reológicos o magneto-reológicos).
Se conocen en la técnica varios documentos de patente, que describen las diferentes lógicas y/o aparatos de control que pueden controlar la dinámica de una suspensión semiactiva, tal como por ejemplo los mencionados a continuación:
- el documento US nº 6.904.344 titulado "Semi-Active Shock Absorber Control System";
- el documento US nº 6.311.110 titulado "Adaptive Off-State Control Method";
- el documento US nº 6.115.658 titulado "No-Jerk Semi-Active Skyhook Control Method and Apparatus";
- el documento US nº 5.732.370 titulado "Method for Controlling Motion Using two-stage Adjustable Damper";
- el documento US nº 5.088.760 titulado "Semi-Active Suspension Control System with Reduced Switching Frequency in Hard and Soft Suspension Characteristics"; y
- el documento US nº 5.062.657 titulado "On/Off Semi-Active Suspension Control".
Tales documentos de patente se basan en un análisis "simplificado" de la dinámica de suspensión, que desde el punto de vista conceptual se representa en la figura 3.
La figura 3 representa una denominada "vista de cuarto de coche", es decir, una vista parcial y esquemática del vehículo que se está simulando, en la que se observa un sistema de suspensión controlable 6, que puede interconectar la masa suspendida 7 ("M") de un vehículo con...
Reivindicaciones:
1. Procedimiento para controlar un generador de fuerza controlable (13) en un sistema de suspensión controlable (12), estando interconectado dicho sistema de suspensión controlable (12) entre un primer elemento (14, 15) y un segundo elemento (15, 14), comprendiendo dicho procedimiento las etapas que consisten en:
- detectar una primera señal (S1) representativa de la aceleración (
- detectar una segunda señal (S2) representativa de la velocidad (
- determinar el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado; y
- aplicar una señal de control (Sin) a dicho generador de fuerza controlable (13) basándose en el valor de dicha razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado, para discriminar si dicho sistema de suspensión controlable (12) representa una dinámica de alta o baja frecuencia.
2. Procedimiento según la reivindicación 1, en el que dicha etapa que consiste en aplicar una ley de control de amortiguación (Sin) a dicho generador de fuerza controlable (13) comprende las etapas adicionales que consisten en:
- aplicar una primera ley de amortiguación (L1, L2) a dicho generador de fuerza controlable (13) si el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado es inferior o igual a una constante predeterminada (a) al cuadrado, es decir, z(
- aplicar una segunda ley de amortiguación (L1, L2) a dicho generador de fuerza controlable si el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado es mayor que dicha constante predeterminada (a) al cuadrado, es decir, z(
3. Procedimiento según la reivindicación 2, en el que dicha etapa que consiste en aplicar una primera ley de amortiguación (L1, L2) a dicho generador de fuerza controlable (13) comprende la etapa que consiste en imponer un primer coeficiente de amortiguación (cmáx, cmtext{í}n) a dicho generador de fuerza controlable (13).
4. Procedimiento según la reivindicación 2 ó 3, en el que dicha etapa que consiste en aplicar una segunda ley de amortiguación (L1, L2) comprende la etapa que consiste en imponer un segundo coeficiente de amortiguación (cmtext{í}n, cmáx) a dicho generador de fuerza controlable (13).
5. Procedimiento según las reivindicaciones 1 a 4, que comprende la etapa adicional que consiste en repetir las etapas que consisten en detectar dichas primera y segunda señales (S1, S2), determinar el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado y aplicar una señal de control (Sin) a dicho generador de fuerza controlable (13) según el valor de dicha razón entre dicha primera señal (S1) al cuadrado a intervalos de tiempo predeterminados (T).
6. Procedimiento según las reivindicaciones 1 y 2, que comprende las etapas adicionales que consisten en:
- detectar una tercera señal (S3) representativa de la aceleración de dicho segundo elemento (14, 15), es decir,
- detectar una cuarta señal (S4) representativa de la velocidad de dicho segundo elemento (14, 15), es decir,
7. Procedimiento según la reivindicación 6, en el que dicha etapa que consiste en aplicar una señal de control (Sin) comprende la etapa que consiste en imponer una primera ley de amortiguación (L1, L2) si:
en las que
a es la frecuencia de invariancia.
8. Procedimiento según la reivindicación 7, en el que dicha primera ley de amortiguación (L1, L2) prevé imponer un primer coeficiente de amortiguación (cmtext{í}n, cmáx) a dicho generador de fuerza controlable (13).
9. Procedimiento según las reivindicaciones 6 a 8, en el que dicha etapa que consiste en aplicar una señal de control (Sin) comprende la etapa que consiste en imponer una segunda ley de amortiguación (L1, L2) si:

en las que
a es la frecuencia de invariancia.
10. Procedimiento según la reivindicación 9, en el que dicha segunda ley de amortiguación (L1, L2) prevé imponer un segundo coeficiente de amortiguación (cmtext{í}n, cmáx) a dicho generador de fuerza controlable (13).
11. Procedimiento según las reivindicaciones 6 a 10, que comprende la etapa adicional que consiste en repetir las etapas que consisten en detectar dichas tercera y cuarta señales (S3, S4) y aplicar una señal de control (Sin) a dicho generador de fuerza controlable (13) a intervalos de tiempo predeterminados (T).
12. Procedimiento según las reivindicaciones 2 a 11, en el que dicha constante predeterminada (a) es la frecuencia de invariancia, siendo dicha constante predeterminada igual a a =
13. Procedimiento según las reivindicaciones 2 a 12, en el que dicho primer coeficiente de amortiguación (cmtext{í}n, cmáx) es un coeficiente de amortiguación rígido cuyo valor está predeterminado, dicho segundo coeficiente de amortiguación (cmtext{í}n, cmáx) es un coeficiente de amortiguación suave cuyo valor está predeterminado.
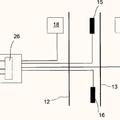
14. Aparato de control (11) para controlar un generador de fuerza controlable (13) en un sistema de suspensión controlable (12), estando interconectado dicho sistema de suspensión controlable (12) entre un primer elemento (14, 15) y un segundo elemento (14, 15), comprendiendo dicho aparato de control:
- unos primeros medios de detección (19) para detectar una primera señal (S1) representativa de la aceleración (
- unos medios de control (20) adecuados para recibir dicha primera señal (S1) y dicha segunda señal (S2);
caracterizado porque dichos medios de control (20) están adaptados para generar una señal de control (Sin) para controlar dicho generador de fuerza controlable (13), generándose dicha señal de control (Sin) según el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado, para discriminar si dicho sistema de suspensión controlable (12) representa una dinámica de alta o baja frecuencia.
15. Aparato de control según la reivindicación 14, caracterizado porque dichos medios de control (20) son adecuados para generar dicha señal de control (Sin) basándose en una primera ley de amortiguación (L1, L2) si el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado es inferior o igual a una constante predeterminada (a) al cuadrado, o basándose en una segunda ley de amortiguación (L1, L2) si el valor de la razón entre dicha primera señal (S1) al cuadrado y dicha segunda señal (S2) al cuadrado es mayor que una constante predeterminada (a) al cuadrado.
16. Aparato de control según la reivindicación 15, caracterizado porque dicha primera ley (L1, L2) es igual a un primer coeficiente de amortiguación (cmáx, cmtext{í}n) y dicha segunda ley de amortiguación (L1, L2) es igual a un segundo coeficiente de amortiguación (cmtext{í}n, cmáx).
17. Aparato según las reivindicaciones 14 a 16, en el que dichos primeros medios de detección (19) comprenden un acelerómetro (19A) asociado funcionalmente a dicho primer elemento (14, 15), adecuado para detectar la aceleración (
18. Aparato de control según las reivindicaciones 14 y 15, caracterizado porque comprende unos segundos medios de detección (21) para detectar una tercera señal (S3) representativa de la aceleración de dicho segundo elemento (14, 15) es decir, (
19. Aparato de control según la reivindicación 18, caracterizado porque dichos medios de control (20) son adecuados para recibir dicha tercera señal (S3) y dicha cuarta señal (S4) para generar dicha señal de control (Sin) basándose en una primera ley de amortiguación (L1, L2) si:

o
en las que
a es la frecuencia de invariancia.
20. Aparato de control según la reivindicación 19, en el que dicha primera ley de amortiguación (L1, L2) prevé imponer un primer coeficiente de amortiguación (cmtext{í}n, cmáx) a dicho generador de fuerza controlable (13).
21. Aparato de control según las reivindicaciones 19 a 20, caracterizado porque dichos medios de control (20) son adecuados para recibir dicha tercera señal (S3) y dicha cuarta señal (S4) para generar dicha señal de control (Sin) basándose en una segunda ley de amortiguación (L1, L2) si:
en las que
a es la frecuencia de invariancia.
22. Aparato de control según la reivindicación 21, en el que dicha segunda ley de amortiguación (L1, L2) prevé imponer un segundo coeficiente de amortiguación (cmtext{í}n, cmáx) a dicho generador de fuerza controlable (13).
23. Aparato de control según las reivindicaciones 18 a 22, en el que dichos segundos medios de detección (21) comprenden un acelerómetro (21A) asociado funcionalmente a dicho segundo elemento (14, 15), adecuado para detectar la aceleración (
24. Aparato de control según las reivindicaciones 14 a 23, en el que dicho primer coeficiente de amortiguación (cmtext{í}n, cmáx) es un coeficiente de amortiguación rígido cuyo valor está predeterminado, dicho segundo coeficiente de amortiguación (cmtext{í}n, cmáx) es un coeficiente de amortiguación suave cuyo valor está predeterminado.
Patentes similares o relacionadas:
 DISPOSITIVO ANTIBALANCEO PARA VEHICULOS, del 22 de Febrero de 2010, de PIAGGIO & C. S.P.A.: Dispositivo antibalanceo para un vehículo del tipo equipado con un sistema de conducción delantero con una estructura de cuadrilátero articulado (41, […]
DISPOSITIVO ANTIBALANCEO PARA VEHICULOS, del 22 de Febrero de 2010, de PIAGGIO & C. S.P.A.: Dispositivo antibalanceo para un vehículo del tipo equipado con un sistema de conducción delantero con una estructura de cuadrilátero articulado (41, […]
Sistema de control de la suspensión de vehículos con mecanización del escape de alto caudal, del 3 de Junio de 2019, de BeijingWest Industries Co. Ltd: Un sistema de control neumático para un vehículo con carrocería y varias ruedas, incluyendo dicho sistema de control neumático (120, […]
Procedimiento y sistema para influir en el movimiento de una estructura de vehículo en un automóvil y vehículo controlado y regulado en sus procesos de movimiento, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para generar señales para influir en el movimiento de una estructura de vehículo , controlable o regulable en sus procesos de movimiento, de un […]
Aparato para el ajuste de suspensión, del 14 de Marzo de 2018, de Fox Factory, Inc: Sistema de suspensión, que comprende: una suspensión de vehículo; un sensor situado para detectar una característica del sistema de suspensión […]
Procedimiento y sistema para influir en el movimiento de una carrocería cuyos desarrollos de movimiento pueden controlarse o regularse de un automóvil y vehículo, del 12 de Julio de 2017, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para generar señales para influir en el movimiento de una carrocería cuyos desarrollos de movimiento pueden controlarse o regularse de un automóvil, […]
 Método para la determinación de la vida útil de un eje, del 9 de Marzo de 2016, de WABCO GMBH: Método para la determinación de una distancia realmente recorrida B o de una distancia realmente recorrida D de un eje elevable en […]
Método para la determinación de la vida útil de un eje, del 9 de Marzo de 2016, de WABCO GMBH: Método para la determinación de una distancia realmente recorrida B o de una distancia realmente recorrida D de un eje elevable en […]
Regulación de la carga de apoyo de un remolque de eje central, del 25 de Febrero de 2015, de WABCO GMBH: Procedimiento para la regulación de la carga de apoyo (Fs) de un remolque de eje central con al menos dos ejes de suspensión neumática y una instalación […]
Un sistema y procedimiento de estimación de estilo de conducción de vehículo automotor, del 26 de Marzo de 2014, de Teleparking S.r.l: Un sistema de estimación de estilo de conducción de vehículo automotor , que comprende: - un aparato de medición de una señal cinemática representativa de una tendencia […]