PROCEDIMIENTO Y APARATO PARA ALMACENAR Y TRANSFERIR CONTENEDORES.
Un procedimiento para almacenar y transferir contenedores (C),
que comprende las etapas de: una etapa (S1) de recepción de información de contenedor para recibir información de los contenedores (C) transmitida desde una unidad (10) de carga/descarga mientras se descargan los contenedores (C) apilados en el buque (S) portacontenedores mediante la unidad (10) de carga/descarga; una etapa (S2) de desplazamiento de unidad de transferencia para desplazar una unidad (30) de transferencia hacia la unidad (10) de carga/descarga que ha transmitido la información de los contenedores (C) de modo que los contenedores (C) se cargan en la unidad (30) de transferencia; etapa (S3) de determinación de almacenamiento para analizar la información recibida de los contenedores (C) para determinar si los contenedores (C) colocados en la unidad (30) de transferencia han de desplazarse a una unidad (20) de apilamiento de modo que los contenedores (C) puedan almacenarse o han de desplazarse a una unidad (50) de entrada/salida de modo que los contenedores (C) puedan retirarse de una terminal de contenedores; una etapa (S4) de selección de posición de apilamiento para seleccionar una posición en la unidad (20) de apilamiento en la que van a apilarse los contenedores (C) después de seleccionar el almacenamiento de los contenedores (C) en la etapa (S3) de determinación de almacenamiento; una etapa (S5) de selección de la ruta más corta para analizar y seleccionar la ruta más corta de entre diversas rutas a lo largo de las cuales puede desplazarse la unidad (30) de transferencia a la posición seleccionada basándose en la determinación en cuanto a si los contenedores (C) han de almacenarse o no en la etapa (S3) de determinación de almacenamiento, y una etapa (S6) de transferencia de contenedor para desplazar la unidad (30) de transferencia a una posición seleccionada basándose en la determinación en cuanto a si los contenedores (C) han de almacenarse o no de modo que los contenedores (C) puedan transferirse, en el que el control de la unidad (30) de transferencia se consigue con transmisión y recepción de manera inalámbrica, en el que la unidad (30) de transferencia situada a la menor distancia con respecto a la unidad (10) de carga/descarga se selecciona en la etapa (S2) de desplazamiento de la unidad de transferencia
Tipo: Resumen de patente/invención. Número de Solicitud: W04001430KR.
Solicitante: JUNG, KYONG-JA.
Nacionalidad solicitante: República de Corea.
Dirección: 3427, SANGAEWON-DONG,JUNGWON-GU SEONGNAM-SI KYONGGI.
Inventor/es: JUNG,KYONG-JA.
Fecha de Publicación: .
Fecha Concesión Europea: 21 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B65G1/04B2
- B65G63/00A2
- B65G67/60A
- B66C19/00B
- G06Q10/00D
Clasificación PCT:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B65G63/00 B65G […] › Transferencia o transbordo a zonas de almacenaje, a estaciones de mercancías o a puertos; Instalaciones de estaciones de clasificación.
- G06F19/00
Clasificación antigua:
- G06F19/00
Fragmento de la descripción:
Procedimiento y aparato para almacenar y transferir contenedores.
Campo técnico
La presente invención se refiere a un procedimiento y aparato para almacenar y transferir contenedores que permite la rápida manipulación de contenedores cargados en o descargados de un buque portacontenedores, almacenándose y transfiriéndose de ese modo los contenedores con mayor facilidad.
Antecedentes de la técnica
Generalmente, los contenedores son receptáculos en forma de caja utilizados para transportar mercancías de manera eficaz y económica. Los contenedores tienen diferentes longitudes y alturas, aunque habitualmente se utilizan contenedores que tienen cada uno una longitud de 20 pies (6,096 m) o 40 pies (12,192 m).
Tales contenedores se apilan en una instalación específica, tal como una terminal de contenedores. La terminal de contenedores está ubicada normalmente enfrente de un puerto. Se apila un gran número de contenedores en la terminal de contenedores, y entonces se cargan en un buque portacontenedores.
Los contenedores pueden tener diferentes alturas aunque tengan la misma longitud. Por ejemplo, los contenedores pueden clasificarse en contenedores secos que tienen cada uno una longitud de 40 pies (12,192 m) y una altura de 2,4 m y contenedores secos altos que tienen cada uno una longitud de 40 pies (12,192 m) y una altura de 2,7 m. Por consiguiente, la diferencia de altura entre cada contenedor seco y cada contenedor seco alto es de 0,3 m.
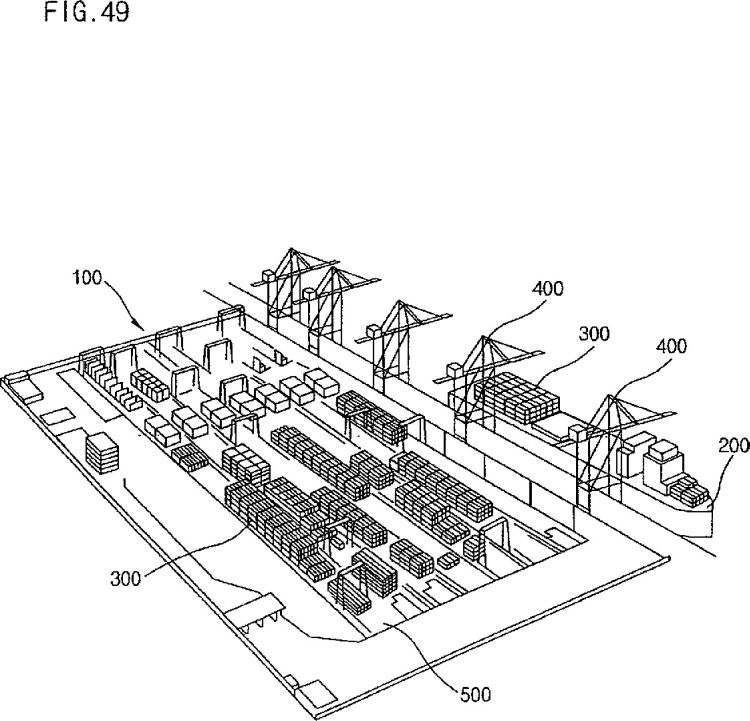
La figura 49 es una vista en perspectiva que muestra esquemáticamente una terminal de contenedores convencional.
Como se muestra en la figura 49, una terminal 100 de contenedores está ubicada enfrente de un puerto, en el que está atracado un buque 200 portacontenedores. Los contenedores 300 se descargan del buque 200 portacontenedores mediante grúas 400 de pórtico, y se transfieren después a un espacio 500 de almacenamiento de contenedores en campo mediante remolques, en el que se apilan los contenedores 300.
Por otro lado, los contenedores 300 apilados en el espacio 500 de almacenamiento de contenedores en campo u otros contenedores 300 llevados al espacio 500 de almacenamiento de contenedores en campo mediante remolques se desplazan a las grúas 400 de pórtico, mediante las cuales se cargan los contenedores 300 en el buque 200 portacontenedores.
Sin embargo, un gran número de contenedores se transfieren mediante las grúas de pórtico y los remolques de modo que los contenedores se cargan en o se descargan del buque portacontenedores. Como resultado, los contenedores descargados del buque portacontenedores o los contenedores cargados en el buque portacontenedores desde el espacio de almacenamiento de contenedores en campo no pueden manipularse con rapidez.
Además, los contenedores se apilan en el espacio de almacenamiento de contenedores en campo aunque sin clasificar los contenedores. Como resultado, los contenedores no se manipulan de manera razonable basándose en las longitudes de los contenedores y la diferencia en el tiempo transcurrido hasta que se retiran los contenedores de la terminal de contenedores, por lo que el almacenamiento y la retirada de los contenedores no se consiguen con facilidad.
Los remolques utilizados para transferir los contenedores a las grúas de pórtico son medios de transporte habituales, cada uno de los cuales se opera por un operario. Sin embargo, los medios de transporte no se controlan de manera razonable ni se manejan con facilidad. Como resultado, los contenedores no se cargan en o se descargan del buque portacontenedores con facilidad.
Además, los contenedores no se almacenan ni se transfieren con facilidad debido a los problemas anteriormente mencionados. Como resultado, se desperdician recursos humanos y materiales al operar la terminal de contenedores.
Es necesario que la terminal de contenedores tenga un área grande suficiente para apilar un gran número de contenedores en la misma. Sin embargo, es muy difícil conseguir un sitio para la terminal de contenedores. Aunque esté prevista una terminal de contenedores a gran escala, los contenedores no se apilan de manera eficaz en el espacio de almacenamiento de contenedores en campo de la terminal de contenedores.
Además, los contenedores se apilan en el espacio de almacenamiento de contenedores en campo de área grande de la terminal de contenedores dejándolos esparcidos, y los contenedores almacenados se guardan alejados del buque portacontenedores. Como resultado, son necesarios un gran número de equipos de transporte y mucha mano de obra para transferir los contenedores al buque portacontenedores.
El documento US 3,543,952 A da a conocer un sistema de almacenamiento y manipulación de contenedores. Comprende, por ejemplo, varias unidades de carga/descarga. Se utilizan lectores de código para los contenedores salientes y entrantes para identificar módulos de código correspondientes en los contenedores. Los contenedores se identifican cuando entran y salen de las estaciones de transferencia de grúa. Para la identificación, los contenedores ya están soportados por un coche o unidad transportadora, de manera que los contenedores se identifican cuando entra o salen de la estación de transferencia de grúa. Se utilizan bogies o unidades de transferencia correspondientes entre las unidades de carga/descarga y las unidades de apilamiento y también entre una unidad de carga/descarga y una unidad de entrada/salida para retirar el contenedor de la terminal de contenedores. Hay dos dispositivos diferentes en los que los coches se utilizan sólo para transferir los contenedores entre la unidad de carga/descarga y la unidad de apilamiento y hay dispositivos adicionales en un almacén de almacenamiento con estaciones de intercambio y transportadores aéreos que se necesitan para transferir los contenedores a la estación de admisión/extracción. Los contenedores se transfieren entonces a otros vehículos en esta estación de admisión/extracción.
Descripción de la invención
Es un objetivo de la presente invención proporcionar un procedimiento y aparato para almacenar y transferir contenedores que permiten una rápida manipulación de contenedores descargados de un buque portacontenedores, almacenándose y transfiriéndose de este modo los contenedores con facilidad, en el que los mismos se llevan a una terminal de contenedores para su carga en un buque portacontenedores o su descarga de dicho buque portacontenedores y se retiran de la terminal de contenedores.
Según la invención, también es posible permitir desembarcar con facilidad contenedores que tienen diferentes longitudes en bogies automáticos y un suministro sencillo de energía eléctrica a los bogies automáticos.
El objetivo correspondiente se soluciona mediante las características de las reivindicaciones independientes. Realizaciones ventajosas se dan a conocer en las reivindicaciones dependientes.
Preferiblemente, el procedimiento para almacenar y transferir contenedores comprende además las etapas de: una etapa de selección de la posición de apilamiento para seleccionar una posición en la unidad de apilamiento en la que van a apilarse los contenedores después de seleccionar el almacenamiento de los contenedores en la etapa de determinación del almacenamiento.
Preferiblemente, la posición en la unidad de apilamiento se selecciona basándose en las longitudes de los contenedores descargados y dependiendo de cuándo se retiren los contenedores en la etapa de selección de la posición de apilamiento.
Preferiblemente, los contenedores se apilan en diferentes unidades de apilamiento basándose en las longitudes de los contenedores, y los contenedores que es necesario retirar en primer lugar se apilan de manera que los contenedores están más próximos a la unidad de entrada/salida que contenedores que es necesario retirar más tarde.
Preferiblemente, la unidad de transferencia situada a la menor distancia con respecto al lugar correspondiente a la posición de los contenedores se selecciona en la etapa de desplazamiento de la unidad de transferencia.
Preferiblemente, la línea de ferrocarril comprende: una pluralidad de piezas de línea de ferrocarril transversales dispuestas en la parte inferior de la unidad de carga/descarga mientras son perpendiculares a la unidad de carga/descarga; piezas de línea de ferrocarril cruzadas que se cruzan entre sí, estando las piezas de línea de ferrocarril cruzadas conectadas a las piezas de línea de ferrocarril transversales en parejas y dispuestas desde las piezas...
Reivindicaciones:
1. Un procedimiento para almacenar y transferir contenedores (C), que comprende las etapas de:
una etapa (S1) de recepción de información de contenedor para recibir información de los contenedores (C) transmitida desde una unidad (10) de carga/descarga mientras se descargan los contenedores (C) apilados en el buque (S) portacontenedores mediante la unidad (10) de carga/descarga;
una etapa (S2) de desplazamiento de unidad de transferencia para desplazar una unidad (30) de transferencia hacia la unidad (10) de carga/descarga que ha transmitido la información de los contenedores (C) de modo que los contenedores (C) se cargan en la unidad (30) de transferencia;
etapa (S3) de determinación de almacenamiento para analizar la información recibida de los contenedores (C) para determinar si los contenedores (C) colocados en la unidad (30) de transferencia han de desplazarse a una unidad (20) de apilamiento de modo que los contenedores (C) puedan almacenarse o han de desplazarse a una unidad (50) de entrada/salida de modo que los contenedores (C) puedan retirarse de una terminal de contenedores;
una etapa (S4) de selección de posición de apilamiento para seleccionar una posición en la unidad (20) de apilamiento en la que van a apilarse los contenedores (C) después de seleccionar el almacenamiento de los contenedores (C) en la etapa (S3) de determinación de almacenamiento;
una etapa (S5) de selección de la ruta más corta para analizar y seleccionar la ruta más corta de entre diversas rutas a lo largo de las cuales puede desplazarse la unidad (30) de transferencia a la posición seleccionada basándose en la determinación en cuanto a si los contenedores (C) han de almacenarse o no en la etapa (S3) de determinación de almacenamiento, y
una etapa (S6) de transferencia de contenedor para desplazar la unidad (30) de transferencia a una posición seleccionada basándose en la determinación en cuanto a si los contenedores (C) han de almacenarse o no de modo que los contenedores (C) puedan transferirse,
en el que el control de la unidad (30) de transferencia se consigue con transmisión y recepción de manera inalámbrica,
en el que la unidad (30) de transferencia situada a la menor distancia con respecto a la unidad (10) de carga/descarga se selecciona en la etapa (S2) de desplazamiento de la unidad de transferencia.
2. El procedimiento según la reivindicación 1, en el que la posición en la unidad (20) de apilamiento se selecciona basándose en las longitudes de los contenedores (C) descargados y dependiendo de cuándo se retiren los contenedores (C) en la etapa (S4) de selección de posición de apilamiento.
3. El procedimiento según la reivindicación 2, en el que los contenedores (C) se apilan en diferentes unidades (20) de apilamiento basándose en las longitudes de los contenedores (C), y los contenedores (C) que es necesario retirar en primer lugar se apilan de manera que los contenedores (C) están más próximos a la unidad (50) de entrada/salida que los contenedores (C) que es necesario retirar más tarde.
4. Un aparato para almacenar y transferir contenedores (C), que comprende:
una unidad (10) de carga/descarga para cargar o descargar contenedores (C) en o desde un buque (S) portacontenedores;
una unidad (20) de apilamiento para apilar los contenedores (C) descargados desde el buque (S) portacontenedores mediante la unidad (10) de carga/descarga y contenedores (C) llevados a una terminal de contenedores;
una unidad (30) de transferencia para transferir los contenedores (C) entre la unidad (10) de carga/descarga y la unidad (20) de apilamiento;
una unidad (40) de control central para recibir información de los contenedores (C) que van a cargarse en o descargarse desde el buque (S) portacontenedores desde la unidad (10) de carga/descarga para determinar si los contenedores (C) están apilados o no mientras se carga o descarga y para identificar la posición de los contenedores (C) y controlar el desplazamiento de la unidad (30) de transferencia de modo que los contenedores (C) puedan manipularse;
una unidad (50) de entrada/salida para llevar los contenedores (C) a la terminal de contenedores o retirar el contenedor (C) fuera de la terminal de contenedores,
en el que la unidad (30) de transferencia se desplaza hacia la unidad (50) de entrada/salida a través de la unidad (20) de apilamiento,
en el que la unidad (20) de apilamiento comprende:
un cuerpo (21) de armazón de acero construido en una estructura de múltiples pisos vertical de manera que el cuerpo (21) de armazón de acero tiene una pluralidad de cámaras (211) de apilamiento definidas en el mismo, teniendo el cuerpo (21) de armazón de acero raíles (212) horizontales dispuestos a ambos lados en cada cámara (211) de apilamiento y un canal (213) de elevación definido verticalmente en el cuerpo (21) de armazón de acero;
una jaula (22) dispuesta en el canal (213) de elevación, teniendo la jaula (22) raíles (221) horizontales correspondientes a los raíles (212) horizontales de la cámara (211) de apilamiento;
un carro (23) montado en la jaula (22) de manera que el carro (23) puede unirse a o separarse de la parte superior del contenedor (C), pudiendo desplazarse el carro (23) horizontalmente a lo largo de los raíles (212) horizontales de la cámara (211) de apilamiento y los raíles (221) horizontales de la jaula (22); y
piezas (24) de elevación unidas al extremo superior del cuerpo (21) de armazón de acero para desplazar la jaula (22) hacia arriba o hacia abajo a lo largo del canal (213) de elevación;
en el que la unidad (30) de transferencia comprende:
una línea (31) de ferrocarril conectada entre la parte inferior de la unidad (10) de carga/descarga y la unidad (50) de entrada/salida a través de la unidad (20) de apilamiento; y
una pluralidad de bogies (32) automáticos que pueden desplazarse automáticamente a lo largo de la línea (31) de ferrocarril,
en el que el control de la unidad (30) de transferencia se consigue con una transmisión y recepción de manera inalámbrica.
5. El aparato según la reivindicación 4, en el que la línea (31) de ferrocarril comprende:
una pluralidad de piezas (311) de línea de ferrocarril transversales dispuestas en la parte inferior de la unidad (10) de carga/descarga que a la vez son perpendiculares a la unidad (10) de carga/descarga;
piezas (312) de línea de ferrocarril cruzadas que se cruzan entre sí, estando conectadas las piezas (312) de línea de ferrocarril cruzadas con las piezas (311) de línea de ferrocarril transversales en parejas y dispuestas desde las piezas (311) de línea de ferrocarril transversales hasta la unidad (20) de apilamiento; y
piezas (313) de línea de ferrocarril convergentes que se extienden desde los extremos de las piezas (312) de línea de ferrocarril cruzadas de manera que las piezas (313) de línea de ferrocarril convergentes son convergentes hacia al menos una posición a través de la unidad (20) de apilamiento.
6. El aparato según la reivindicación 5, que comprende además:
piezas (33) giratorias de línea de ferrocarril dispuestas en la sección en la que las piezas (312) de línea de ferrocarril cruzadas se cruzan entre sí y en la sección en la que las piezas (313) de línea de ferrocarril convergentes son convergentes.
7. El aparato según la reivindicación 6, en el que cada una de las piezas (33) giratorias de línea de ferrocarril comprende:
una mesa (332) circular dispuesta en la sección en la que las piezas (312) de línea de ferrocarril cruzadas se cruzan entre sí y en la sección en la que las piezas (313) de línea de ferrocarril convergentes son convergentes, teniendo la mesa (332) circular piezas (331) de línea de ferrocarril de conexión dispuestas en la superficie superior de la misma, estando conectadas las piezas (331) de línea de ferrocarril de conexión con las piezas (312) de línea de ferrocarril cruzadas y las piezas (313) de línea de ferrocarril convergentes;
un árbol (333) giratorio montado en el centro de la superficie inferior de la mesa (332) circular;
una base (334) para soportar de manera giratoria el extremo inferior del árbol (333) giratorio; y
una pieza (335) de accionamiento giratorio conectada eléctricamente a la unidad (40) de control central para hacer girar la mesa (332) circular.
8. El aparato según la reivindicación 7, en el que un saliente (336) de soporte anular está unido a la superficie inferior de la mesa (332) circular de manera que el saliente (336) de soporte está dispuesto alrededor del árbol (333) giratorio mientras está distanciado del árbol (333) giratorio, y en el que una pluralidad de rodillos (337) de soporte están unidos de manera giratoria a la superficie inferior de los salientes (336) de soporte.
9. El aparato según la reivindicación 5, en el que la unidad (50) de entrada/salida comprende:
un cargador (51) para cargar el contenedor (C) desplazado mediante el bogie (32) automático por encima de la sección en la que las piezas (313) de línea de ferrocarril convergentes son convergentes según el control de la unidad (40) de control central en un remolque.
10. El aparato según la reivindicación 9, en el que el cargador comprende:
un armazón (52) de cargador montado por encima de los extremos convergentes de las piezas (331) de línea de ferrocarril convergentes;
un bogie (53) móvil que puede desplazarse a lo largo del armazón (52) de cargador;
una pluralidad de piezas (54) de sujeción unidas al bogie (53) móvil para sujetar el contenedor (C); y
una pieza de accionamiento del cargador (51) conectada eléctricamente a la unidad (40) de control central para accionar el bogie (53) móvil.
11. El aparato según la reivindicación 5, en el que el bogie (32) automático comprende:
un cuerpo (321) de bogie con forma de armazón rectangular;
una pluralidad de ejes (322) de bogie montados de manera giratoria en la parte inferior del cuerpo (321) de bogie;
ruedas (323) de bogie fijadas de manera segura a ambos extremos de cada uno de los ejes (322) de bogie;
piezas (324) de accionamiento de bogie para accionar los ejes (322) de bogie;
una pieza (325) de control de bogie para controlar una de las piezas (324) de accionamiento de bogie; y
un transceptor (326) inalámbrico conectado eléctricamente a la pieza (325) de control de bogie para realizar una operación de transmisión y recepción inalámbrica con la unidad (40) de control central.
12. El aparato según la reivindicación 11, en el que el cuerpo (321) de bogie está dotado en la superficie superior del mismo de una pluralidad de salientes (327) de fijación de manera que los salientes (327) de fijación pueden insertarse de manera segura en las zonas de esquina de un contenedor (C) de gran tamaño colocado sobre la superficie superior del bogie (32) automático.
13. El aparato según la reivindicación 11, en el que el cuerpo (32) de bogie está dotado de baterías (328) recargables para suministrar corriente eléctrica a las piezas (324) de accionamiento de bogie, respectivamente.
14. El aparato según la reivindicación 4, en el que el carro (23) comprende:
una pieza (231) de accionamiento horizontal que incluye un cuerpo (231A) principal dispuesto en la jaula (22), y una pluralidad de rodillos (231B) de accionamiento dispuestos de manera giratoria a ambos lados del cuerpo (231A) principal de manera que los rodillos (231B) de accionamiento se desplazan a lo largo de los raíles (221) horizontales de la jaula (22) mientras están en contacto de rodadura con los raíles (221) horizontales de la jaula (22) mediante un motor (231C) de accionamiento fijado al cuerpo (231A) principal; y
piezas (232) de sujeción formadas en la superficie inferior del cuerpo (231A) principal de manera que las piezas (232) de sujeción pueden acoplarse en o desacoplarse de orificios (H) formados en la superficie superior del contenedor (C).
15. El aparato según la reivindicación 4 ó 14, en el que la unidad (20) de apilamiento comprende además:
piezas (25) de enclavamiento para enclavar la jaula (22) en el cuerpo (21) de armazón de acero en la posición en la que los raíles (212) horizontales de la cámara (211) de apilamiento están a nivel con los raíles (221) horizontales de la jaula (22).
16. El aparato según la reivindicación 15, en el que cada una de las piezas (24) de elevación comprende:
un motor (241) hidráulico montado en el extremo superior del cuerpo (21) de armazón de acero;
una polea (242) de accionamiento que puede ponerse en funcionamiento mediante el motor (241) hidráulico; y
cables (243) de alambre conectados a la jaula (22) de manera que los cables (243) de alambre pueden enrollarse mediante la polea (242) de accionamiento.
17. El aparato según la reivindicación 16, en el que una pluralidad de raíles (214) de guiado están dispuestos verticalmente a lo largo del canal (213) de elevación, y una pluralidad de rodillos (222) están unidos de manera giratoria con el exterior de la jaula (22) de manera que los rodillos (222) pueden estar en contacto con los raíles (214) de guiado.
18. El aparato según la reivindicación 15, en el que cada una de las piezas (24) de elevación comprende:
un cilindro (244) fijo inferior que tiene un extremo inferior abierto, estando dotado el cilindro (244) fijo inferior en la parte superior del mismo de una primera entrada (244B) superior;
un vástago (245) de actuación inferior insertado en el cilindro (244) fijo inferior a través de la parte superior del cilindro (244) fijo inferior, teniendo el vástago (245) de actuación inferior un primer canal (245C) central y un primer canal (245E) interno definido en el mismo, teniendo el primer canal (245C) central extremos superior e inferior abiertos y teniendo el primer canal (245E) interno extremos superior e inferior cerrados mediante un primer reborde (245A) superior y un primer pistón (245B), teniendo el vástago (245) de actuación inferior una primera entrada (245D) inferior y una primera salida (245F) superior formadas en las partes superior e inferior del primer canal (245E) interno, respectivamente;
un primer canal (246) externo definido entre el vástago (245) de actuación inferior y el cilindro (244) fijo inferior para comunicarse con la primera entrada (244B) superior del cilindro (244) fijo inferior y la primera entrada (245D) inferior del vástago (245) de actuación inferior;
un cilindro (247) móvil superior formado de manera solidaria con la parte superior del primer reborde (245A) superior, teniendo el cilindro (247) móvil superior un extremo inferior abierto para comunicarse con el vástago (245) de actuación inferior, teniendo el cilindro (247) móvil superior una segunda entrada (247A) superior formada en la parte superior del mismo;
un vástago (248) de actuación superior insertado en el cilindro (247) móvil superior a través de la parte superior del cilindro (247) móvil superior, teniendo el vástago (248) de actuación superior un segundo canal (248D) central y un segundo canal (248E) interno definido en el mismo, teniendo el segundo canal (248D) central un extremo inferior abierto y un extremo superior cerrado mediante un segundo reborde (248A) superior y teniendo el segundo canal (248E) interno extremos superior e inferior cerrados mediante el segundo reborde (248A) superior y un segundo pistón (248B), teniendo el vástago (248) de actuación superior una segunda entrada (248C) inferior y una segunda salida (248F) superior cerrada formadas en las partes superior e inferior del segundo canal (248E) interno, respectivamente, estando el vástago (248) de actuación superior conectado a la jaula (22);
un segundo canal (249) externo definido entre el vástago (248) de actuación superior y el cilindro (247) móvil superior para comunicarse con la segunda entrada (247A) superior del cilindro (247) móvil superior y la segunda entrada (248C) inferior del vástago (248) de actuación superior;
un primer conducto (250) de suministro que tiene un extremo conectado a la primera entrada (245F) superior del cilindro (244) fijo inferior y el otro extremo conectado a un tanque de fluido externo que incluye una bomba hidráulica; y
un segundo conducto (251) de suministro que tiene un extremo conectado a la primera salida (245F) superior del vástago (245) de actuación inferior y el otro extremo conectado a la segunda entrada (247A) superior del cilindro (247) móvil superior.
19. El aparato según la reivindicación 18, en el que el primer conducto (250) de suministro, el segundo conducto (251) de suministro, el primer canal (245E) interno del vástago (245) de actuación inferior y el segundo canal (248E) interno del vástago (248) de actuación superior están construidos de manera que la cantidad de fluido suministrada a través del primer conducto (250) de suministro y el segundo conducto (251) de suministro es igual a la cantidad de fluido suministrada a través del primer canal (245E) interno del vástago (245) de actuación inferior y el segundo canal (248E) interno del vástago (248) de actuación superior.
20. El aparato según la reivindicación 18, en el que
el extremo de un primer tope (244C) superior del cilindro (244) fijo inferior se extiende hacia abajo de manera que el extremo del primer tope (244C) superior del cilindro (244) fijo inferior bloquea aproximadamente la mitad superior de la primera entrada (245F) superior del cilindro (244) fijo inferior,
el extremo de un segundo tope (247B) superior del cilindro (247) móvil superior se extiende hacia abajo de manera que el extremo del segundo tope (247) superior del cilindro (247) móvil superior bloquea aproximadamente la mitad superior de la segunda entrada (247A) superior del cilindro (247) móvil superior,
el primer pistón (245B) del vástago (245) de actuación inferior está distanciado del extremo inferior del cilindro (244) fijo inferior una distancia que corresponde a aproximadamente la mitad inferior de la primera entrada (244B) superior del cilindro (244) fijo inferior, y
el segundo pistón (248B) del vástago (248) de actuación superior está distanciado del extremo inferior del cilindro (247) móvil superior una distancia que corresponde a aproximadamente la mitad inferior de la segunda entrada (247A) superior del cilindro (247) móvil superior.
21. El aparato según la reivindicación 18, en el que una polea (255) de accionamiento está unida a la superficie superior del segundo reborde (248A) superior, un cable (256) de alambre enrollado en la polea (255) de accionamiento está conectado a la jaula (22), y rodillos (252) de guiado están montados en un lado de la polea (255) de accionamiento de manera que los rodillos (252) de guiado pueden desplazarse a lo largo de los raíles (253) de guiado dispuestos verticalmente en el canal (213) de elevación mientras están en contacto de rodadura con los raíles (253) de guiado, estando dispuestos los rodillos (252) de guiado en parejas en una disposición superior e inferior.
22. El aparato según la reivindicación 15, en el que cada una de las piezas (25) de enclavamiento comprende:
una pieza (251) de enclavamiento móvil que incluye un cilindro (251A) de actuación montado en la jaula (22) y un vástago (251B) de inserción unido de manera solidaria con el extremo de un vástago de pistón del cilindro (251A) de actuación de manera que el vástago (251B) de inserción puede desplazarse hacia delante o hacia atrás con respecto a la jaula (22) mediante el cilindro (251A) de actuación; y
una pieza (252) de inserción de enclavamiento formada en el cuerpo (21) de armazón de acero correspondiente a la cámara (211) de apilamiento para enclavar de manera segura el vástago (251B) de inserción.
23. El aparato según la reivindicación 22, en el que la pieza (252) de inserción de enclavamiento comprende:
un elemento (252A) de enclavamiento unido al extremo superior de la cámara (211) de apilamiento correspondiente al canal (213) de elevación; y
un orificio (252B) de inserción formado en el elemento (252A) de enclavamiento para permitir al vástago (251B) de inserción insertarse a través del mismo.
24. El aparato según la reivindicación 22, en el que la pieza (252) de inserción de enclavamiento comprende:
un elemento (252C) de enclavamiento de guiado unido al extremo superior de la cámara (211) de apilamiento correspondiente al canal (213) de elevación; y
una ranura (252D) en forma de cuña formada en el elemento (252C) de enclavamiento de guiado de manera que el vástago de inserción puede insertarse en la ranura (252D) en forma de cuña mientras se guía a lo largo de la ranura (252D) en forma de cuña.
25. El aparato según la reivindicación 23, en el que el orificio (252B) de inserción es un orificio oblongo que se extiende verticalmente, aumentando la anchura del orificio (252B) de inserción gradualmente desde el extremo inferior al extremo superior del orificio (252B) de inserción de manera que la anchura del orificio en el extremo superior del orificio (252B) de inserción es mayor que el diámetro del vástago (251B) de inserción.
26. El aparato según la reivindicación 24, en el que un rodillo (251E) está unido de manera giratoria al extremo del vástago (251B) de inserción de manera que el vástago (251B) de inserción puede guiarse con facilidad a lo largo de la ranura (252D) en forma de cuña mientras está en contacto de rodadura con la ranura (252D) en forma de cuña mediante el rodillo (251E).
27. El aparato según la reivindicación 23 ó 24, en el que la pieza de enclavamiento móvil comprende además:
un tubo (251C) de deslizamiento que rodea el vástago (251B) de inserción de manera que el vástago (251B) de inserción puede deslizarse a través del tubo (251C) de deslizamiento; y
una barra (251D) de soporte unida entre el tubo (251C) de deslizamiento y la jaula (22).
28. El aparato según la reivindicación 14, en el que la unidad (20) de apilamiento comprende además:
piezas (26) de regulación de la altura, comprendiendo cada una de las piezas (26) de regulación de la altura:
un cilindro (261) hidráulico montado hacia abajo en una esquina correspondiente del carro (23); y
un bastidor (262) de izado, que tiene una pieza (232) de sujeción correspondiente, montado en el extremo del vástago de pistón del cilindro (261) hidráulico de manera que el bastidor (262) de izado se desplaza hacia arriba o hacia abajo mediante el cilindro (261) hidráulico y la altura de la pieza (232) de sujeción se regula según el desplazamiento del bastidor (262) de izado.
29. El aparato según la reivindicación 28, en el que cada una de las piezas (26) de regulación de la altura comprende:
un vástago (263) de guiado dispuesto en un lado del cilindro (261) hidráulico, estando el vástago (263) de guiado unido al bastidor (262) de izado a través del carro (23).
30. El aparato según la reivindicación 29, en el que cada una de las piezas (26) de regulación de la altura comprende:
un tope (265) unido al carro (23) de manera que el tope (265) puede engancharse en una ranura (264) de enganche formada en el extremo superior del vástago (263) de guiado para sujetar el vástago (263) de guiado.
31. El aparato según la reivindicación 30, en el que el tope (265) comprende:
una placa (265A) de tope dispuesta en la superficie superior del carro (23), teniendo la placa (265A) de tope ranuras (265B) de acoplamiento formadas en ambos extremos de la misma de manera que las ranuras (265B) de acoplamiento pueden acoplarse simultáneamente con las correspondientes ranuras (264) de enganche de un par de vástagos (263) de guiado; y
un cilindro (265C) hidráulico de tope dispuesto por debajo de la placa (265A) de tope para desplazar la placa (265A) de tope hacia un lado.
32. El aparato según la reivindicación 31, en el que el tope (265) comprende además:
un par de orificios (265D) de regulación de la distancia formados en la placa (265A) de tope mientras están distanciados entre sí; y
un par de barras (265E) de regulación montadas en la superficie superior del carro (23) de manera que las barras (265E) de regulación se insertan en los orificios (265D) de regulación de la distancia, respectivamente, para regular la distancia desplazable de la placa (265A) de tope.
33. El aparato según la reivindicación 32, en el que el carro (23) está dotado de un tubo (266) de guiado que rodea el vástago (263) de guiado.
34. El aparato según la reivindicación 4 ó 15,
en el que la unidad (20) de apilamiento comprende: una instalación (L) de apilamiento de armazón de acero que incluye una pluralidad de cuerpos (21) de armazón de acero conectados entre sí de manera que los suelos de uno de los cuerpos (21) de armazón de acero se comunican con los suelos del otro cuerpo (21) de armazón de acero, respectivamente, teniendo cada uno de los cuerpos (21) de armazón de acero al menos dos cámaras (211) de apilamiento dispuestas a lo largo de ambos lados del canal (213) de elevación, y
en el que el carro (23) se desplaza horizontalmente desde uno de los canales (213) de elevación al otro canal (213) de elevación en la instalación (L) de apilamiento de armazón de acero.
35. El aparato según la reivindicación 34, en el que la unidad (20) de apilamiento comprende además:
una pieza (27) que impide la introducción para evitar que el carro (23) previsto en uno de los canales (213) de elevación se introduzca en el otro canal (213) de elevación.
36. El aparato según la reivindicación 34 ó 35, en el que la instalación (L) de apilamiento de armazón de acero incluye diversos cuerpos (21) de armazón de acero que tienen diferentes tamaños de modo que pueden apilarse diversos contenedores (C) que tienen diferentes tamaños y alturas.
37. El aparato según la reivindicación 35, en el que la pieza (27) que impide la introducción comprende:
salientes (271) de seguridad unidos, en parejas, a los interiores de las cámaras (211) de apilamiento opuestas que se comunican entre sí; y
escuadras (272) de detención unidas, en parejas, al carro (23) de manera que las escuadras (272) de detención pasan por un par de salientes (271) de seguridad situados cerca del carro (23) y chocan contra el otro par de salientes (271) de seguridad situados alejados del carro (23).
38. El aparato según la reivindicación 37, en el que
cada uno de los salientes (271) de seguridad está hecho de caucho de modo que pueden absorberse impactos mediante los salientes (271) de seguridad.
39. El aparato según la reivindicación 37, que comprende además:
piezas (28) de introducción de contenedor dispuestas a ambos lados de la instalación (L) de apilamiento de armazón de acero para introducir contenedores (C) en los canales (213) de elevación.
40. El aparato según la reivindicación 39, en el que cada una de las piezas (28) de introducción de contenedor comprende:
raíles (281) de introducción montados en el exterior del extremo inferior de cada canal (213) de elevación;
bogies (282) dispuestos sobre los raíles (281) de introducción de manera que los bogies (282) pueden desplazarse a lo largo de los raíles (281) de introducción;
raíles (283) superiores dispuestos por encima de los raíles (281) de introducción que a la vez son perpendiculares a los raíles (281) de introducción; y
cargadores (284) de apilamiento dispuestos sobre los raíles (283) superiores de manera que los cargadores (284) de apilamiento pueden desplazarse a lo largo de los raíles (283) superiores para cargar contenedores (C) en los bogies (282).
41. El aparato según la reivindicación 40, en el que cada uno de los cargadores (284) de apilamiento comprende:
un bogie (284A) móvil que puede desplazarse a lo largo de los raíles (283) superiores;
un armazón (284B) de fijación dispuesto por debajo del bogie (284A) móvil; y
una pluralidad de piezas (284C) de sujeción unidas al armazón (284B) de fijación para sujetar contenedores (C) que tienen diferentes tamaños.
Patentes similares o relacionadas:
SISTEMAS Y MÉTODOS PARA GESTIONAR INFORMACIÓN RELATIVA A FLUIDOS MÉDICOS Y RECIPIENTES PARA LOS MISMOS, del 7 de Diciembre de 2011, de MALLINCKRODT INC.: Un recipiente de producto radiofarmacéutico conteniendo un producto radiofarmacéutico y que tiene una etiqueta RFID asociada con él, siendo […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA TRANSMISIÓN DE NOTIFICACIONES, del 1 de Diciembre de 2011, de DEUTSCHE POST AG: Sistema de envío postal, que comprende una instalación electrónica de compartimentos para paquetes, un dispositivo para la transmisión de […]
UN MÉTODO Y SISTEMA PARA REALIZAR EL SEGUIMIENTO DE ARTÍCULOS ALIMENTARIOS, del 14 de Noviembre de 2011, de MAREL HF.: Un método combinado de gestión de información y de tratamiento de artículos alimentarios, comprendiendo el citado método las etapas de: almacenar un conjunto de datos de […]
MÉTODO Y APARATO PARA EL SEGUIMIENTO Y LOCALIZACIÓN DE UN ARTÍCULO MÓVIL, del 3 de Noviembre de 2011, de UNITED STATES POSTAL SERVICE: Método para la determinación de la localización de un artículo móvil en el que el artículo es un envío postal, comprendiendo el método las siguientes etapas: dar instrucciones […]
ACTIVACIÓN SELECTIVA DE DISPOSITIVOS DE RF, del 9 de Junio de 2011, de INTELLEFLEX CORPORATION: Método que es para activar un dispositivo y comprende los pasos de: recibir un código de activación , teniendo el código de activación un campo de […]
 AYUDA A LA CONDUCCIÓN DE UN VEHÍCULO, del 29 de Abril de 2011, de NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO: Sistema para suministrar información para la ayuda a la conducción de un vehículo , comprendiendo el sistema: - unidades sensoras para […]
AYUDA A LA CONDUCCIÓN DE UN VEHÍCULO, del 29 de Abril de 2011, de NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO: Sistema para suministrar información para la ayuda a la conducción de un vehículo , comprendiendo el sistema: - unidades sensoras para […]
SISTEMA INTELIGENTE DE ALMACENAJE DE MUESTRAS, del 7 de Febrero de 2011, de UNIVERSIDAD DE ALCALA UNIVERSIDAD DE ZARAGOZA: Sistema inteligente de almacenaje de muestras.Recipiente que incluye, en una sola construcción, depósito para muestras y chip RFID (Radio […]
 TECNOLOGÍA DE MALLA INALÁMBRICA MÓVIL PARA LA SEGURIDAD DE CONTENEDORES DE TRANSPORTE, del 22 de Diciembre de 2010, de THE BOEING COMPANY: Sistema de seguridad de contenedores de carga o cargamento, que una red de sensores inalámbrica que comprende un primer dispositivo de seguridad […]
TECNOLOGÍA DE MALLA INALÁMBRICA MÓVIL PARA LA SEGURIDAD DE CONTENEDORES DE TRANSPORTE, del 22 de Diciembre de 2010, de THE BOEING COMPANY: Sistema de seguridad de contenedores de carga o cargamento, que una red de sensores inalámbrica que comprende un primer dispositivo de seguridad […]