PROCEDIMIENJTO PARA LA MEDICIÓN DE UNA POSICIÓN DE VÍA.
Procedimiento para la medición de una posición de vía, que es registrada con relación a una cuerda larga (17) formada por un rayo láser (16) como recta de referencia de un sistema de medida (9) con formación de segmentos de medida (15) consecutivos,
en que un segmento de medida (15) está limitado por un lado por el comienzo de un tramo de medida (punto A) de un vagón de medida de vía (1) y por otro lado por el final del tramo de medida (punto B), tras lo cual un vagón de medida adelantado (12) que está en posición fija en la vía durante el tramo de medida es avanzado separándolo del vagón de medida de vía (1) para formar un segmento de medida (15) contiguo, que termina con el final (punto C) del siguiente tramo de medida del vagón de medida de vía (1), caracterizado porque un ángulo α formado por las dos cuerdas largas (17) de dos segmentos de medida (15) consecutivos es medido por un sistema de medida inercial (19) que registra las coordenadas espaciales de las cuerdas largas (17), y porque los distintos segmentos de medida (15) son unidos formando una imagen de lugar espacial con ayuda de los respectivos valores de medición de ángulo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/004812.
Solicitante: FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H..
Nacionalidad solicitante: Austria.
Dirección: JOHANNESGASSE 3 1010 WIEN AUSTRIA.
Inventor/es: THEURER, JOSEF, LICHTBERGER, BERNHARD DR..
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Junio de 2008.
Clasificación Internacional de Patentes:
- B61K9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61K EQUIPOS AUXILIARES ESPECIALMENTE ADAPTADOS PARA FERROCARRILES, NO PREVISTOS EN OTRO LUGAR (frenos acumuladores de la energía B61H; protección de la vía contra los agentes atmosféricos E01B; limpieza de raíles, quitanieves E01H). › B61K 9/00 Gálibos de perfiles de vehículos ferroviarios; Detección o indicación de calentamiento excesivo de órganos; Dispositivos sobre las locomotoras o los vagones que indican las secciones defectuosas de la vía; Características generales de vehículos de auscultación de la vía. › Instalaciones de medida para vigilar la vía (aplicación de aparatos o dispositivos de medida para trabajos de colocación de la vía E01B 35/00; técnicas de medida G01).
- E01B35/00 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › Aplicaciones de los aparatos o dispositivos de medida para la construcción de vías (aparatos para locomotoras o vagones para indicar o registrar secciones de vía en mal estado B61K 9/00; medida de ángulos, de dimensiones lineales o de irregularidades en general G01B, G01C).
- G01C15/00A
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
Clasificación PCT:
- E01B35/00 E01B […] › Aplicaciones de los aparatos o dispositivos de medida para la construcción de vías (aparatos para locomotoras o vagones para indicar o registrar secciones de vía en mal estado B61K 9/00; medida de ángulos, de dimensiones lineales o de irregularidades en general G01B, G01C).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359189_T3.pdf
Descripción:
La invención se refiere a un procedimiento para la medición de una posición de vía según la reivindicación principal.
A través del documento US 7 050 926 es conocido un procedimiento de este tipo, en que un vagón de medida de vía con un receptor láser es movido en dirección hacia un vagón adelantado en posición fija. Aquí se detecta un rayo láser, que es generado por un emisor láser situado en el vagón adelantado. Los valores de corrección determinados para la vía son grabados y transmitidos a una bateadora para la realización de una corrección de posición de vía.
A través del documento US 5 090 329 es conocida una medición de vía, que se realiza con un sistema de medida asociado a una bateadora. Éste comprende un vagón adelantado desplazable independientemente, situado delante de la bateadora en la dirección de trabajo y dotado de un emisor láser. La bateadora lleva asociado un receptor láser, que se encuentra en un extremo delantero de un sistema de referencia propio de la máquina.
Para la detección de la posición de un punto de referencia, el vagón adelantado es colocado cerca de ese punto y una cuerda larga formada por el emisor láser es llevada a una posición deseada. A continuación, la bateadora trabaja en dirección hacia el vagón adelantado en reposo. A continuación, el vagón adelantado es desplazado hasta el siguiente punto de referencia y es formada nuevamente una cuerda larga. Finalmente, a través del documento US 5 157 840 es conocido otro sistema de medida más, en el que la cuerda larga sigue al vagón de medida y se mide con ello permanentemente una variación de ángulo de la cuerda larga respecto al vagón adelantado en posición fija. A través de la medición de ángulo se calcula la diferencia entre la posición real y la deseada de la vía.
La tarea de la presente invención consiste entonces en crear un procedimiento del tipo citado al principio, con el que sobre todo en curvas de vía pueda conseguirse una optimización de la medición de posición de vía también cuando falten valores de puntos de referencia.
Esta tarea es resuelta conforme a la invención con un procedimiento del tipo en cuestión mediante las propiedades indicadas en la parte caracterizante de la reivindicación principal.
Con una medición de ángulo de este tipo es posible ahora obtener, también en curvas de vía sin datos de puntos de referencia, una imagen de lugar coherente de la posición espacial de toda la curva de vía. La ventaja particular consiste entonces en que para la corrección de la posición real de la curva de vía puede realizarse una compensación de errores de onda larga que comprende varios segmentos de medida. Además de ello, alternativamente y en conexión con una detección a posteriori de puntos de referencia puede obtenerse también una posición absoluta y una demarcación de la vía.
Otras ventajas de la invención resultan de las reivindicaciones subordinadas y de la descripción del dibujo.
En lo que sigue se describe más detalladamente la invención con ayuda de un ejemplo de realización representado en el dibujo. Muestran:
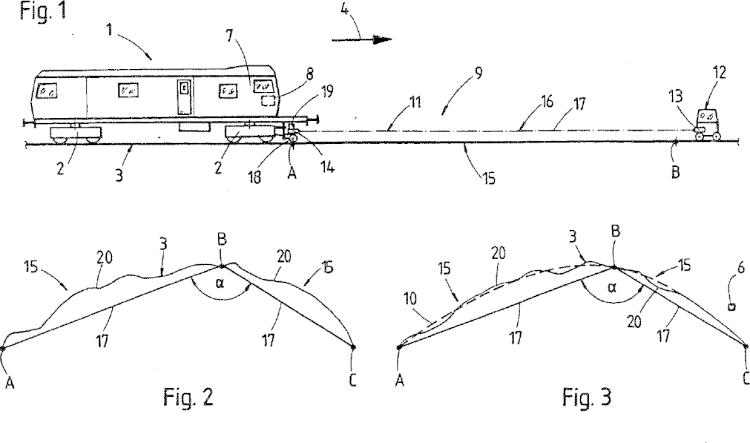
la figura 1 una vista lateral esquemática de un vagón de medida de vía con un vagón de medida adelantado
para la medición de un segmento de medida, y
las figuras 2, 3 respectivamente una representación de dos segmentos de medida consecutivos.
Un vagón de medida de vía 1 representado en la figura 1 puede desplazarse a través de bogies 2 sobre una vía 3 en una dirección de trabajo 4. En una cabina de conducción 7 delantera se encuentra una unidad de control y computación 8.
Un sistema de medida 9 para la detección de la posición de vía consta de un sistema de referencia de láser 11. Éste tiene un vagón de medida adelantado 12, desplazable independientemente sobre la vía 3, con un emisor láser 13. Éste lleva asociado un receptor láser 14, que se encuentra sobre un eje de medida delantero 18 del vagón de medida de vía 1. Sobre este eje de medida 18 está dispuesto también un sistema de medida inercial (IMU, del inglés “Inertial Measurement Unit”) 19.
Un segmento de medida 15 está limitado por un lado por un punto A, en el que el vagón de medida de vía 1 comienza la exploración de la vía 3 con ayuda de una cuerda larga 17 formada por un rayo láser 16 del emisor láser 13. El segmento de medida 15 termina por otro lado (véase el punto B), tan pronto como el vagón de medida de vía 1, captando continuamente los datos de posición real, ha alcanzado al vagón de medida adelantado 12 en posición fija.
La figura 2 muestra dos segmentos de medida 15 consecutivos de la vía 3, que están limitados por los puntos A, B o respectivamente B, C. Cada segmento de medida 15 contiene una cuerda larga 17 y una posición real 20 de la vía 3. Cuando el vagón de medida de vía 1 empieza el tramo de medida en el punto A, las coordenadas espaciales para el punto A son registradas y almacenadas en la unidad de computación 8, con ayuda del sistema de medida inercial 19. Una vez registradas también las coordenadas espaciales para los puntos B y C, se produce el cálculo de un ángulo α, que es formado por las dos cuerdas largas 17 consecutivas.
Con esta medición continua de ángulo puede calcularse mediante integración la imagen de lugar o la trayectoria posicional de la vía 3 en altura, dirección e inclinación transversal con las correspondientes coordenadas espaciales. La posición espacial real 20 de la vía 3, determinada con ello y que se extiende sobre varios segmentos de medida 15, es suavizada a continuación computacionalmente – tanto en lo relativo a la posición en altura como también a la posición lateral – por superposición de una curva de compensación 10 de onda larga (véase la figura 3). Para ello, a continuación podría calcularse a modo de ejemplo sobre una longitud de por ejemplo 100 m una curva de tipo spline móvil. Esto tendría como consecuencia que las longitudes de onda erróneas de hasta 100 m pueden eliminarse sin problemas. La curva de compensación 10 da como resultado la posición deseada para una corrección de posición de vía a realizar
**(Ver fórmula)**
posteriormente mediante una bateadora. Los datos almacenados podrían transmitirse a una bateadora por ejemplo mediante un disco o mediante transmisión inalámbrica.
Paralelamente a la medición de la posición de vía puede producirse de modo ventajoso también una medición de puntos de referencia 6, que son integrados en la curva de compensación 10 determinada.
**(Ver fórmula)**
Reivindicaciones:
1. Procedimiento para la medición de una posición de vía, que es registrada con relación a una cuerda larga
(17) formada por un rayo láser (16) como recta de referencia de un sistema de medida (9) con formación de segmentos de medida (15) consecutivos, en que un segmento de medida (15) está limitado por un lado por el comienzo de un tramo 5 de medida (punto A) de un vagón de medida de vía (1) y por otro lado por el final del tramo de medida (punto B), tras lo cual un vagón de medida adelantado (12) que está en posición fija en la vía durante el tramo de medida es avanzado separándolo del vagón de medida de vía (1) para formar un segmento de medida (15) contiguo, que termina con el final (punto C) del siguiente tramo de medida del vagón de medida de vía (1), caracterizado porque un ángulo α formado por las dos cuerdas largas (17) de dos segmentos de medida (15) consecutivos es medido por un sistema de medida inercial (19) que registra las coordenadas espaciales de las cuerdas largas (17), y porque los distintos segmentos de medida (15) son unidos formando una imagen de lugar espacial con ayuda de los respectivos valores de medición de ángulo.
2. Procedimiento según la reivindicación 1, caracterizado porque sobre varios segmentos de medida (15) consecutivos se calcula una curva de compensación (10) de onda larga como posición deseada de la vía.
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]