Métodos de control de prealimentación adaptativo en un sistema quirúrgico.
Método implementado por ordenador para utilizar una tabla de prealimentación (321) para controlar un componente (411) de un sistema quirúrgico,
que comprende:
recibir (105) un punto de ajuste de funcionamiento;
determinar si existe un término de prealimentación almacenado en una tabla de prealimentación para el punto de ajuste de funcionamiento, comprendiendo la tabla de prealimentación una pluralidad de puntos de ajuste;
si no existe el término de prealimentación para el punto de ajuste de funcionamiento,
cambiar (107) un valor asociado con el componente del sistema en incrementos utilizando una salida del controlador para mover un parámetro de rendimiento del sistema a una primera tolerancia aceptable del punto de ajuste de funcionamiento deseado;
determinar (111) si una medición de error de estado estacionario para el sistema está dentro de una segunda tolerancia aceptable;
si la medición del error de estado estacionario para el sistema está dentro de la segunda tolerancia aceptable, registrar el valor como el término de prealimentación correspondiente en la tabla de prealimentación para el punto de ajuste de funcionamiento actual;
si la medición de error de estado estacionario para el sistema no está dentro de la segunda tolerancia aceptable, no registrar el valor como el término de prealimentación correspondiente en la tabla de prealimentación para el punto de ajuste de funcionamiento actual;
si existe el término de prealimentación para el punto de ajuste de funcionamiento,
controlar (115) el componente utilizando la salida del controlador que corresponde al término de prealimentación asociado con el punto de ajuste de funcionamiento deseado para mover un parámetro de rendimiento del sistema hacia el punto de ajuste de funcionamiento deseado;
cuando se detecta un cambio en el sistema que está asociado con posibles cambios en los términos de prealimentación, generar (117) uno o más nuevos términos de prealimentación para la tabla de prealimentación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2010/055054.
Solicitante: ALCON RESEARCH, LTD..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 6201 South Freeway TB4-8 Fort Worth, TX 76134 ESTADOS UNIDOS DE AMERICA.
Inventor/es: AGAHI,DARYUSH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B13/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › eléctricos.
PDF original: ES-2533981_T3.pdf
Fragmento de la descripción:
Métodos de control de prealimentación adaptativo en un sistema quirúrgico.
Campo de la invención La presente invención se refiere en general a algoritmos de control. Más particularmente, pero no a título limitativo, la presente invención se refiere a la prealimentación (feedforward) dinámica.
Descripción de la técnica relacionada Los sistemas complejos, tales como las consolas quirúrgicas, pueden incluir muchos componentes diferentes que interactúan uno con otro y con el entorno. El control de estos sistemas (por ejemplo, a la vista de una entrada de usuario recibida o una respuesta programada) puede requerir sistemas de control que manipulen los componentes para lograr el rendimiento deseado. Frecuentemente, estos sistemas de control pueden controlar muchos componentes diferentes y utilizar entradas de varias fuentes diferentes (por ejemplo, entrada de usuario, entrada de sensor, etc.) .
El documento US5550685, por ejemplo, que se refiere al almacenamiento de información, describe la aplicación de un algoritmo de prealimentación adaptivo como filtro selectivo de frecuencia en un servosistema de accionamiento de disco en bucle cerrado a fin de compensar perturbaciones periódicas que aparecen de otra forma en la señal de error de posición del servosistema. El documento US7283321, por ejemplo, se refiere a accionamientos de disco y métodos que permiten un control de búsqueda adaptivo de actuador de etapa doble y una calibración de ganancia de microactuador.
Sumario La presente invención proporciona un método implementado por ordenador para utilizar una tabla de prealimentación para controlar un componente de sistema quirúrgico, y un software informático para ello, de acuerdo con las reivindicaciones que siguen.
En diversas formas de realización, un método de utilizar prealimentación para controlar un componente de sistema puede incluir subdividir un rango de funcionamiento del componente del sistema en dos o más puntos de ajuste o regiones de punto de ajuste de funcionamiento, crear una tabla de prealimentación para mapear términos de 35 prealimentación con respecto a los puntos de ajuste de funcionamiento, recibir un punto de ajuste de funcionamiento y determinar si existe un término de prealimentación para el punto de ajuste de funcionamiento. Si no existe un término de prealimentación para el punto de ajuste de funcionamiento, el componente del sistema puede incrementarse según sea necesario utilizando una salida de controlador para mover el sistema hasta dentro de una primera tolerancia aceptable del punto de ajuste deseado. En algunas formas de realización, una medición de error de estado estacionario para el sistema puede determinarse y compararse con una segunda tolerancia aceptable. Si la medición del error de estado estacionario para el sistema está dentro de la tolerancia aceptable, el término de prealimentación correspondiente puede registrarse en la tabla de prealimentación para el punto de ajuste actual. Si la medición de error de estado estacionario para el sistema no está dentro de la segunda tolerancia aceptable, el término de prealimentación correspondiente puede no cambiarse en la tabla de prealimentación.
En algunas formas de realización, si existe el término de prealimentación para el punto de ajuste de funcionamiento, el componente del sistema puede controlarse utilizando una salida de controlador que corresponde al término de prealimentación asociado con el punto de ajuste deseado en la tabla de prealimentación para mover el sistema hacia el punto de ajuste deseado. Cuando se detecta un cambio del sistema que esté asociado con posibles cambios en 50 los valores de prealimentación (por ejemplo, un cambio en la temperatura del sistema) , pueden generarse nuevos valores de prealimentación generados para la tabla de prealimentación.
Breve descripción de los dibujos 55 Para una comprensión más completa de la presente invención, se hace referencia a la siguiente descripción considerada conjuntamente con los dibujos adjuntos, en los que:
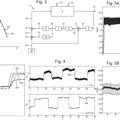
Las figuras 1a-b ilustran un diagrama de flujo de un método de prealimentación según una forma de realización;
Las figuras 2a-c ilustran formas de realización de tablas de prealimentación;
La figura 3 ilustra un esquema de un sistema que implementa prealimentación según una forma de realización; y La figura 4 ilustra una consola quirúrgica según una forma de realización. 65
Debe entenderse que tanto la descripción general anterior como la siguiente descripción detallada se proporcionan a título de ejemplo explicativo solamente y están destinadas a proporcionar una explicación adicional de la presente invención reivindicada.
Descripción detallada de las formas de realización Las consolas quirúrgicas pueden incluir una gama de sistemas (por ejemplo, sistemas neumáticos, sistemas fluídicos, etc.) utilizados para soportar la funcionalidad de diversos dispositivos quirúrgicos (por ejemplo, sonda de vitrectomía, pieza de mano de facoemulsificación, etc.) . La consola quirúrgica puede utilizar uno o más sistemas de control (por ejemplo, que incluyen uno o más controladores) para controlar y vigilar diferentes aspectos de estos sistemas. Por ejemplo, los sistemas de control pueden recoger datos sobre un sistema (por ejemplo, a través de una entrada de usuario, a través de uno o más sensores, etc.) y enviar señales de control (por ejemplo, una posición de válvula) dentro del sistema para conseguir un parámetro de rendimiento deseado cerca de un punto de ajuste (por ejemplo, un parámetro de rendimiento deseado por el sistema o solicitado por un usuario, tal como una presión deseada para un tanque acumulador) . En algunas formas de realización, el punto de ajuste puede recibirse de un usuario (por ejemplo, una presión deseada ajustada por un interruptor de pedal) o puede ser un punto de ajuste del sistema preprogramado/por defecto (son posibles también otras fuentes de puntos de ajuste) . En algunas formas de realización, el sistema de control puede controlar el sistema, por ejemplo, emitiendo una señal para mover un actuador, mover una válvula, incrementar la salida de potencia, etc.
En algunas formas de realización, el sistema de control (por ejemplo, a través de un controlador de realimentación 301 como se ve en la figura 3) puede cambiar el sistema en incrementos (por ejemplo, mover la válvula en un porcentaje incremental, tal como 1% de apertura, o en un incremento posicional, tal como 1 grado de rotación) . Son posibles también otros tipos de incremento. En algunas formas de realización, un usuario puede ajustar el tamaño del incremento o el tamaño del incremento puede ser un valor por defecto predeterminado (una resolución de incremento mayor puede dar como resultado cambios más rápidos que en el caso de un incremento menor, pero puede dar como resultado una probabilidad más alta de rebasar/no alcanzar el blanco) . En algunas formas de realización, los incrementos pueden ser variables (por ejemplo, el sistema puede utilizar incrementos más pequeños cuando el sistema se aproxima más al punto de ajuste de blanco) . Después de incrementar un componente del sistema, el sistema de control puede obtener nuevos datos (por ejemplo, para obtener una medición de presión resultante de un sensor de presión) . El sistema puede determinar si es necesario un ajuste adicional y puede emitir una señal de control correspondiente (por ejemplo, para mover la válvula en un porcentaje incremental adicional (o deshacer un movimiento incremento previo) ) . En algunas formas de realización, el sistema puede dejar de incrementar cuando el sistema está dentro del punto de ajuste de blanco. La tolerancia puede recibirse de usuario o preprogramarse en el sistema. Este tipo de control puede caracterizarse como un bucle de control cerrado. El tamaño del incremento y la frecuencia del cambio pueden dar como resultado tiempos de respuesta del sistema más rápidos o más lentos con mayor o menor rebasamiento/alcance insuficiente correspondientes (lo que puede afectar al error de estado estacionario del sistema) . En algunas formas de realización, el sistema de control puede vigilar continuamente diversos parámetros del sistema y hacer ajustes según sea necesario para mantener uno o más parámetros de rendimiento dentro de un rango de los parámetros de rendimiento deseados.
En algunas formas de realización, el sistema de control (por ejemplo, a través del controlador de prealimentación 303 como se ve en la figura 3) puede utilizar también prealimentación en sus algoritmos de control para mejorar diversos parámetros de rendimiento y producir una salida del sistema que siga una trayectoria deseada. Por ejemplo, un sistema de control puede almacenar... [Seguir leyendo]
Reivindicaciones:
1. Método implementado por ordenador para utilizar una tabla de prealimentación (321) para controlar un componente (411) de un sistema quirúrgico, que comprende:
recibir (105) un punto de ajuste de funcionamiento;
determinar si existe un término de prealimentación almacenado en una tabla de prealimentación para el punto de ajuste de funcionamiento, comprendiendo la tabla de prealimentación una pluralidad de puntos de ajuste;
si no existe el término de prealimentación para el punto de ajuste de funcionamiento, cambiar (107) un valor asociado con el componente del sistema en incrementos utilizando una salida del controlador para mover un parámetro de rendimiento del sistema a una primera tolerancia aceptable del punto de ajuste de funcionamiento deseado;
determinar (111) si una medición de error de estado estacionario para el sistema está dentro de una segunda tolerancia aceptable;
si la medición del error de estado estacionario para el sistema está dentro de la segunda tolerancia aceptable, registrar el valor como el término de prealimentación correspondiente en la tabla de prealimentación para el punto de ajuste de funcionamiento actual;
si la medición de error de estado estacionario para el sistema no está dentro de la segunda tolerancia aceptable, no registrar el valor como el término de prealimentación correspondiente en la tabla de prealimentación para el punto de ajuste de funcionamiento actual;
si existe el término de prealimentación para el punto de ajuste de funcionamiento, controlar (115) el componente utilizando la salida del controlador que corresponde al término de prealimentación asociado con el punto de ajuste de funcionamiento deseado para mover un parámetro de rendimiento del sistema hacia el punto de ajuste de funcionamiento deseado;
cuando se detecta un cambio en el sistema que está asociado con posibles cambios en los términos de prealimentación, generar (117) uno o más nuevos términos de prealimentación para la tabla de prealimentación.
2. Método según la reivindicación 1, en el que el cambio en el sistema que está asociado con un posible cambio en los términos de prealimentación incluye un cambio de temperatura.
3. Método según la reivindicación 1, en el que la generación de nuevos términos de prealimentación cuando se detecta un cambio en el sistema incluye registrar un nuevo término de prealimentación si una medición del error de estado estacionario para el sistema está dentro de la segunda tolerancia aceptable cuando el sistema está posteriormente dentro de una primera tolerancia aceptable del punto de ajuste de funcionamiento deseado.
4. Método según la reivindicación 1, en el que la determinación de la medición del error de estado estacionario para el sistema comprende calcular una desviación estándar y una media de múltiples muestras de la salida del controlador durante el tiempo en el que el sistema está dentro de la primera tolerancia aceptable del punto de ajuste de funcionamiento deseado, siendo la medición determinada del error de estado estacionario para el sistema la desviación estándar dividida por la media.
5. Método según la reivindicación 1, en el que el punto de ajuste de funcionamiento es una presión de depósito (407) y en el que la salida del controlador y los términos de prealimentación comprenden unas posiciones de una válvula
(405) acoplada a un depósito (407) .
6. Método según la reivindicación 1, en el que el sistema es una consola quirúrgica (401) y en el que el punto de ajuste de funcionamiento es recibido a través de una pantalla táctil (403) o un interruptor de pedal (409) de la consola quirúrgica (401) .
7. Método según la reivindicación 1, en el que la tabla de prealimentación (321) no está poblada antes del funcionamiento del componente (411) del sistema y en el que los términos de prealimentación son determinados y utilizados para poblar la tabla de prealimentación durante el funcionamiento posterior del componente del sistema.
8. Método según la reivindicación 1, en el que la tabla de prealimentación (321) está poblada antes del funcionamiento del componente (411) del sistema con términos de prealimentación calculados o por defecto y en el
que unos términos de prealimentación actualizados son determinados y utilizados para sobrescribir unos términos de prealimentación existentes en la tabla durante el funcionamiento posterior del componente del sistema.
9. Software informático que, cuando se ejecuta en un procesador de ordenador, lleva a cabo las etapas de método según cualquiera de las reivindicaciones 1 a 8.
Patentes similares o relacionadas:
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
 Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Procedimiento y aparato de administración de energía eléctrica y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de administración de energía eléctrica, aplicado en un dispositivo electrónico cargado por un adaptador de alimentación eléctrica […]
MÉTODO DE CONTROL DE UN CONVERTIDOR ELECTRÓNICO CC/CA TRIFÁSICO CON FALLO EN UNA FASE, del 19 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método de control de un convertidor electrónico CC/CA trifásico con fallo en una fase. Se divulga un método de control de un convertidor electrónico de CC/CA trifásico […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Método de control de bomba, del 4 de Diciembre de 2019, de Grundfos Holding A/S: Procedimiento de control de bombas para controlar el funcionamiento de un sistema der bombas con al menos dos equipos de bombas , que están dispuestos en paralelo […]
MÉTODO Y SISTEMA DE CONTROL PREDICTIVO DE UN CONVERTIDOR CC/CA, del 2 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de control predictivo de un convertidor CC/CA. Se divulga un método y un sistema de control predictivo de un convertidor CC/CA para transmisión […]
Equilibrio de par síncrono en sistemas de múltiples bombas, del 5 de Noviembre de 2019, de ITT Manufacturing Enterprises LLC: Un método de control en un sistema que tiene múltiples bombas (18a-18d), en donde las múltiples bombas (18a-18d) se accionan y funcionan conjuntamente […]