PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE.
Plataforma de fondo submarino configurable para mediciones diversas,
con opción de control remoto, y modos cautivo o libre, consistente en una base estructural de 3 tubos curvados en "L"-fijados a 120º a una placa central- que acaban en planchas deslizantes o ruedas motrices. Su envolvente es prismático-triangular. Lleva adaptada una pértiga (y/u otros dispositivos) con reflector de infrarrojos (medición con Estación Total) o DGPS-RTK.
Deslizándola sobre fondo sedimentario -por arrastre (cautivo) o autopropulsión (control remoto, por cable o radiofrecuencia)- y midiendo la posición del extremo visible, a intervalos, se describen perfiles.
Compite con batimetrías desde barco que tienen muy baja precisión por referirse al variable nivel del mar y usar una medición indirecta (tiempo) que relacionada a una inconstante velocidad del sonido da espacio (profundidad).
Las playas requieren la alta precisión de la medición directa (espacio; longitud total plataforma/pértiga). Para ello se desarrolló este diseño con posibilidad de desplazamiento rápido sobre el fondo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900473.
Solicitante: ARREDONDO DIEZ, JOSE FRANCISCO.
Nacionalidad solicitante: España.
Provincia: CÁDIZ.
Inventor/es: ARREDONDO DIEZ,JOSE FRANCISCO.
Fecha de Solicitud: 11 de Febrero de 2009.
Fecha de Publicación: .
Fecha de Concesión: 13 de Enero de 2012.
Clasificación Internacional de Patentes:
B63C11/00TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
G01C15/00A
Clasificación PCT:
B63G8/42B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00). › Embarcaciones submarinas remolcadas.
G01C13/00FISICA. › G01METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Geodesia especialmente adaptada a aguas abiertas, p. ej. mar, lago, río o canal (medida del nivel de líquidos G01F).
G01C7/00G01C […] › Trazado de perfiles (mediante fotogrametría o videogrametría G01C 11/00).
Fragmento de la descripción:
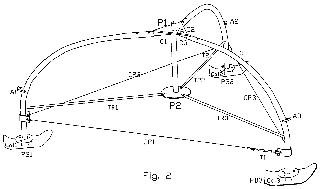
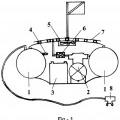
Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre. La presente invención se refiere a una plataforma, o armazón, que configurada con accesorios varios -al desplazarse sobre un fondo submarino sedimentario- capta información para almacenarla o trasmitirla a una base remota, o ambas cosas. Su aplicación más típica es la descripción morfológica (topográfica e hidrográfica) de playas y costas con fondos sedimentarios -hasta el nivel subacuático de base del movimiento de los sedimentos por el oleaje- mediante perfiles medidos con una Estación Total Topográfica o con DGPS-RTK. Antecedentes de la invención respecto a la configuración para perfiles de playas Son conocidos algunos intentos rudimentarios de uso de móviles para medición directa submarina de perfiles de playas por parte de instituciones de investigación y particulares. Se arrastraban sobre ruedas ó pletinas deslizadoras (tipo trineo o sledge). Se medía con un nivel y una pértiga graduada fijada al vehículo. Se conoce la patente US-5990809. A ojos expertos, llevarla a la práctica parece imposible, y aún más remoto que sea viable como alternativa a la práctica actual. Descripción de la invención La plataforma fundamental está formada por un chasis con una estructura central -un corto tubo vertical terminado en dos placas horizontales (P1, P2)- con tres tubos (o varillas) curvados en L (aprox.) fijados (a intervalos de 120º) a la placa superior (P1) y que terminan en placas horizontales de calibrado (Cal1-3). A estas se unen a modo de pies por medio de 3 tornillos bien placas basales (PB1-3) en forma de láminas deslizantes con 6 huecos para 3 fijaciones (bi-direccionalidad), ó ruedas (ó combinación de ambas) que en todo caso se apoyan en un mismo plano base. Los tubos curvados están afianzados en el otro extremo por 3 separadores (TR1-3), que irradian de la placa inferior, más 3 cables perimetrales (CP1-3). En su envolvente, tiene forma de prisma triangular. Sus extremos inferiores forman un trípode. Adaptándola distintos accesorios, puede operar en varias configuraciones (con ruedas y/o planchas deslizadoras inferiores) para aplicaciones diferentes. En una de ellas -la batimétrica llamada Flamenco- en el centro de la placa superior (P1) tiene un vástago (VA). Este acoge la base de una pértiga de materiales ligeros (fibra de carbono, o aluminio, o madera-aluminio) con diámetros de 3Q, 25 y 2Q mm. La pértiga lleva un reflector de infrarrojos (IRR) en su extremo y 3 tirantes (para fijación y ajuste de la verticalidad) de varilla de acero inoxidable de 3 mm roscada en los extremos, o bien de cable de acero inoxidable o de nylon, con diámetros de 1,5 a 2 mm. Las varillas roscadas, o tensores, fijados en A1-3 permiten ajustar la perpendicularidad de la pértiga al plano de la placa 1ª (P1) y al que describen las tres bases (PB1-3). El reflector está siempre a la vista, fuera del agua. Al deslizar la plataforma sobre un fondo arenoso hacia tierra, tanto por cabestrante e hilo como por autopropulsión a control remoto, se toman los datos con medios de alta precisión: ya sea una Estación Total, un DGPS-RTK, ó ambos. Así se realizan perfiles de playas muy precisos hasta distancias (~500 m de la orilla) más allá de las Profundidades de Cierre típicas del transporte de sedimentos, con un sólo equipo instrumental. A gran profundidad la pértiga no es práctica y la plataforma está unida por cable (o módem acústico) al módulo receptor que permanece a flote para el control remoto. El presente nuevo método de medición directa (longitudes) respecto al fondo, da una precisión muy superior a la de la tecnología estándar, con GPS y sonar, para perfilar playas. El SONAR da la profundidad por medición indirecta (tiempos, que se pasan a longitudes por medio de una velocidad del sonido, VS). Sus limitaciones mayores son dos: que el 0, u origen de medida, es el plano de agua de posición muy difícil de precisar, y que se usa una V S constante (de una densidad superficial) aunque suele ser variable en la columna. En casos reales (estructura térmica de verano) puede alcanzarse un error superior al 10% del fondo de escala (20%, por ida y vuelta), al ser las aguas costeras un medio de densidad tan anisótropa. El diseño del presente invento, prácticamente, no tiene nada en común con móviles de medición de playas conocidas hasta ahora. Sus ventajas que vienen de un diseño de carácter acuático en sentido estricto, con una razón peso/volumen mínima y con forma óptima para regímenes de alto N (número de Reynolds), son: forma, dimensiones y materiales inéditos, óptimos para operar en el ámbito costero, y a mayores profundidades, sobre todo en presencia de fuertes corrientes, unidireccionales (tipo de marea) u oscilatorias (tipo oleaje), peso muy reducido (transportable por una sola persona), construcción modular (montaje/desmontaje rápido y muy sencillo), rigidez estructural muy alta (indeformable, para medición de alta precisión), 2 ES 2 352 490 A1 excelente penetración hidrodinámica (velocidad de desplazamiento, >1 m/s, y desacople de la acción del oleaje en la crítica zona de rompientes), operación rápida, de gran sencillez, y alto rendimiento (en modo perfiles de playa -con Estación Total- la precisión es mejor que 1 cm en X-Y-Z). El peso inicial puede alterarse con sencillez (a más o a menos) según la aplicación. Lo que tienen en común los métodos clásico y novedoso, para hacer perfiles de playas, es la parte de topografía terrestre. Como extra, el método clásico -para la parte marina (denominada batimetría, para profundidades superiores a 1,20 m)- necesite una embarcación con equipamientos complejos, así como un operativo y cálculos a posteriori complicados. El nuevo método puede realizar perfiles hasta las profundidades de 6 (Flamenco) y 11 m (Estrella), manteniendo la sencillez y alta precisión de la topografía terrestre. En resumen, las ventajas de la invención son: necesitar un solo equipo con medios sencillos y no dos (tierra-mar) con medios muy complejos; alcanzar una precisión elevada (una mejora cercana a 2 órdenes de magnitud); obtener un perfil completo sin las típicas discontinuidades tierra-mar; y facilitar una entrega inmediata de los datos (sin la complejidad de las integraciones -Campaña de Tierra/Campaña de Mar, posición/profundidad- y de las correcciones de nivel del Mar, oleaje, etc.). Breve descripción de los dibujos Para la mejor comprensión de cuanto queda descrito en esta memoria se añaden unos dibujos en los que, tan sólo a título de ejemplo, se representan casos prácticos de realización de Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre. Figura 1, la plataforma en modalidad Flamenco, configurada para batimetría hasta 6 m de profundidad con dos patas avante, con pértiga en dos tramos y sus tres tirantes, más el Reflector IR de 360º (IRR) y un Flotador (FL) antivuelco. Figura 2, detalle de la plataforma fundamental y sus componentes (sin pértiga), configurada para batimetría con 2 patas avante. Figura 3, placa basal deslizadora. Figura 4, la rueda doble con el motor y engranaje. Figura 5, plataforma para más de 11 m en modo Estrella, con dos ruedas y cable extensible (en su módulo de almacenamiento) de unión al conjunto flotante de trasmisiones (control y datos) y de posicionamiento (GPS u otro). En raso necesario, como en presencia de fuertes corrientes en la columna de agua, puede prescindirse del cable y comunicar por medio de módems acústicos. Descripción de dos realizaciones preferidas para distintas profundidades Hasta 6 m. en aluminio (tubos: A= 30x3,3 y B= 20x1,5 mm; pletinas de 8 a 6 mm). El trípode tiene como tronco o núcleo un tubo A con dos placas horizontales soldadas en sus extremos: la triangular central primaria (P1) con el vástago de anclaje de la pértiga (VA) atornillado, y la secundaria (P2) en posición inferior. La placa 1ª tiene soldados 3 cilindros (C1-3), a 120º, en los que se insertan tres tubos A (de 1,5 m) que de la horizontal se curvan hasta la vertical a modo de patas. Estos tubos se afirman por un pasador a otros tubos B rectos (TR1-3) horizontales anclados a la placa 2ª (P2). El conjunto se mantiene rígido por medio de tres finos cables perimetrales (CP1 -3) de acero inoxidable con tensores (T1-3). Cada tubo-pata tiene soldado un anclaje (A1-3) para uno de los tirantes que adrizan la pértiga. Por abajo, llevan soldada una placa de calibrado (Cal1-3) a la que se fija cada placa basal deslizadora o pie (PB1-3) por tres tornillos (en vértices de triángulo equilátero) regulables. Estos pies, en forma de patín o miniski (Figs. 2-3), se deslizan sobre la superficie sedimentaria del fondo sin alterarla. Los anclajes tipo A1-3, sirven como puntos de tracción...
Reivindicaciones:
1. Plataforma de fondo submarino configurable pana mediciones diversas, con opción de control remoto, y modos cautivo o libre, formada por un chasis con una estructura central -un corto tubo vertical terminado en dos placas horizontales (P1 y P2)- a cuya placa superior se afianzan tres tubos (o varillas) curvados en L (aprox.) terminados en placas horizontales de calibrado (Cal1-3); a ellas se unen a modo de pies por medio de 3 tornillos bien las placas basales (PB1-3), ó las ruedas, ó combinación de ambas, que en cualquier caso se apoyan en un mismo plano base. Al calibrar se ajustan tanto el paralelismo de los 4 planos -el de la placa 1ª (P1), y los 3 planos de apoyo (PB1-3)- como las distancias entre ellos para igualarlas. Los tubos curvados se fijan a intervalos de 120º a la placa 1ª (P1) y se afirman por el otro extremo con tres tubos separadores (TR1-3) que irradian de la placa inferior (P2) más tres cables perimetrales (CP1-3). La estructura de placas (y/o ruedas), tubos (o varillas) y cables tiene un plano vertical de simetría paralelo al vector del desplazamiento (normal al eje de giro de las ruedas). 2. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, con vástago de anclaje (VA) para pértiga de materiales ligeros (fibra de carbono, o aluminio, o madera-aluminio) con diámetros de 30, 25 y 20 mm, y con anclajes (A1-3) para los tirantes de soporte de la pértiga. 3. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, con tirantes para la pértiga o bien de varilla de acero inoxidable de 3 mm roscada en los extremos, o bien de cable de acero inoxidable o de nylon, con diámetros de 1,5 a 2 mm. Las varillas roscadas andadas en A1-3, o tensores, permiten ajustar la perpendicularidad de la pértiga al plano de la placa 1ª (P1) y al que describen las tres bases (PB1-3) que son paralelos entre sí todos ellos. 4. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, con bases de apoyo (PB1-3) en forma de láminas adecuadas (espátula) para deslizar sobre la superficie sedimentaria, con 6 huecos para 3 fijaciones (PB1-3) para la bi-direccionalidad. 5. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, con ruedas (Fig. 4) de llanta bi-cilíndrica (sin neumático) directamente en contacto con el fondo. 6. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, con control remoto por radio, o por cable (A), o por módem acústico (B), para el caso de la configuración más de 11 m de profundidad, o combinación de los anteriores. 7. Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, según la Reivindicación 1, en configuración para batimetría, o hidrografía, del fondo sedimentario con una pértiga que porta un reflector de infrarrojos IRR sencillo, o múltiple (360º), ó un DGPS-RTK, en su extremo visible, y que al tener una altura conocida con gran precisión, por la triangulación típica de la topografía convencional y aplicando una Función de Transferencia que depende de dicha altura y de la pendiente media del terreno, consigue con gran precisión las coordenadas de posición y la cota del punto de intersección de la proyección de la pértiga con el suelo. Al desplazarla por una alineación determinada con un cabestrante y cable, o por sus propios medios, describe perfiles topográfico-batimétricos con estas mediciones, que una vez integrados dan la superficie que es el objetivo final de la campaña de mediciones. ES 2 352 490 A1 6 ES 2 352 490 A1 7 ES 2 352 490 A1 8 ES 2 352 490 A1 9 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
Robot submarino humanoide transformable, del 26 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación […]
VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO, del 3 de Diciembre de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un […]
SISTEMA COMBINADO PARA EL REGISTRO Y LA CONSERVACION ARQUEOLOGICA SUBACUATICA IN SITU., del 1 de Octubre de 2005, de UNIVERSIDAD DE CADIZ: Sistema combinado para el registro y la conservación arqueológica subacuática in situ. Permite el registro documental en objetos arqueológicos subacuáticos y […]
COLECTOR SUBMARINO DE CRUDO, del 19 de Septiembre de 2011, de LAZES, RICHARD J.: Colector submarino de fluído, que comprende un contenedor y un dispositivo de posicionamiento de nave que se puede unir a una nave sumergida […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]
Equipo autónomo de buceo con umbilical, del 3 de Noviembre de 2015, de ESCRIVA MORANT, Emilio: 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, […]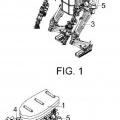 Robot submarino humanoide transformable, del 26 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación […]
Robot submarino humanoide transformable, del 26 de Agosto de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación […] VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO, del 3 de Diciembre de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un […]
VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO, del 3 de Diciembre de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un […]