PLANIFICACIÓN DE INTINERARIO CON TERMINACIÓN SIN RIESGOS.
Un procedimiento para la creación de una representación de un volumen de una operación de terminación segura que indica la altitud de vuelo permisible más baja para conseguir una trayectoria de planeo de un vehículo hasta un punto de terminación de un área de interés,
caracterizado por la etapa de la toma en consideración de zonas de vuelo no permisibles mediante la adición de la altitud de vuelo de forma que rodee dichas zonas de vuelo no permisibles al calcular la altitud de vuelo permisible más baja, procedimiento que incluye, así mismo, las etapas de: a. la discretización del área de interés en áreas discretizadas; b. la introducción de datos relativos a las zonas de No vuelo y la relación de Sustentación y Resistencia Aerodinámica; c. la selección de al menos un punto que defina un punto de terminación; d. la conmutación de la altitud de vuelo permisible más baja para los puntos adyacentes al punto que define el punto de terminación, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto que define un punto de terminación; e. la repetición de la computación de la altitud de vuelo permisible más baja para cada punto adyacente al punto computado con anterioridad, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto computado con anterioridad; y f. la repetición de las etapas d - e para todos los puntos de terminación seleccionados hasta que todos los puntos del área discretizada hayan recibido una altitud de vuelo permisible más baja, dando como resultado una superficie inferior de un volumen de una operación de terminación segura
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06116479.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: Tyskeng,Mathias , Ivansson,Johan.
Fecha de Publicación: .
Fecha Solicitud PCT: 30 de Junio de 2006.
Clasificación Internacional de Patentes:
- G05D1/10B
Clasificación PCT:
- G05D1/10 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Campo de la Invención
La presente invención se refiere al campo de la navegación aérea, en particular a un llamado volumen de una operación de terminación segura calculada. Así mismo, se refiere a un procedimiento para la constitución de dicho volumen, y a una aeronave provista de un sistema que utiliza dicho volumen para planificar una ruta de vuelo y 5 / o una ruta de emergencia.
Antecedentes de la Invención
Dentro de un par de años los Vehículos Aéreos No Tripulados, UVAs, se prevé que vuelen en el territorio aéreo civil junto con los aviones civiles y de acuerdo con las reglas civiles del tráfico aéreo. Esto exigirá unas condiciones de seguridad muy elevadas de los sistemas de una tercera parte que entre en relación con el UAV, 10 tanto en el aire como en el suelo. Respecto de una tercera parte en el aire será preciso disponer de sistemas anticolisión y similares para garantizar la seguridad en el aire y será preciso disponer de sistemas similares para evitar que el vehículo choque con el suelo. Sin embargo, surge un problema cuando la propulsión del vehículo deja de funcionar, y el vehículo es incapaz de evitar terminar en el suelo.
Hoy en día, los vehículos aéreos no tripulados operan enteramente en áreas designadas en las que están 15 autorizados a terminar en el suelo. Para cumplir las condiciones de seguridad para volar en áreas no designadas, los territorios aéreos civiles, el vehículo debe ser capaz de controlar que termine dentro de las áreas autorizadas en las que no exista peligro para terceras partes.
En la actualidad los UVAs, ya se trate de vehículos pilotados por control remoto (RPVs) o semi o completamente autónomos, representan un campo de importancia creciente de la técnica aeronáutica. Cuando se 20 hacen volar vehículos autónomos, es de la mayor importancia asegurar la planificación de la ruta para que el vehículo aéreo sea capaz de llegar hasta un punto de terminación aprobado. Si se produce un fallo en el UAV, como por ejemplo un fallo del motor o evento similar, el UAV debe terminar el vuelo en un punto de terminación aprobado en el que haya un terreno aceptable. Sobre todo es necesario excluir completamente el riesgo de que el UAV termine o se estrelle en áreas pobladas. Esto puede conseguirse mediante el empleo de unos puntos de terminación 25 siendo estos puntos determinados de antemano como puntos aceptables. Así mismo, es importante, tal y como se expuso con anterioridad, que el UAV sea capaz de llegar hasta uno de sus puntos de terminación y que dicha circunstancia se produzca sin riesgos.
El sistema típico de seguridad de un UAV debe siempre determinar que no exista peligro para una tercera parte. Estos sistemas requieren que el vehículo pueda volar de manera normal. Si se produce un fallo de un motor 30 en un vehículo no tripulado es inevitable una terminación contra el suelo, lo que significa que, con el fin de garantizar la seguridad de terceras partes, el vehículo debe terminar sobre un punto predeterminado y seguro.
El documento DE, A1, 3124553 divulga un cálculo de una trayectoria de planeo en el que la altitud necesaria es computada en base a la relación de sustentación y resistencia aerodinámica para llegar a un área elegida como objetivo. 35
El documento US, A, 5142480 divulga un procedimiento para proporcionar una indicación acerca de si una aeronave puede planear con seguridad hasta un aeropuerto seleccionado y representar los datos requeridos, como por ejemplo la altitud requerida, un número predeterminado de aeropuertos, etc.
El documento US, A1, 20040193334 divulga un procedimiento para proporcionar una ruta de terminación a un vehículo cuando se produce una situación de emergencia. La aeronave sigue una trayectoria de terminación 40 hasta un punto de terminación con una altitud y una velocidad específicas.
El documento EP-A-1 657 611 divulga un procedimiento y un aparato para la determinación automática de una rota para su uso por un sistema de control de vuelo en respuesta a las contingencias experimentadas por el vehículo aéreo.
Para hacer posible una terminación segura dentro de un área no designada se requiere lo siguiente: 45
- Debe existir al menos un punto o área en el que se permita la terminación segura.
- El vehículo debe siempre saber cuál es el punto de terminación al que debe dirigirse, con el fin de terminar de forma segura.
- El vehículo debe siempre estar en una posición en la que el vehículo pueda planear hasta dicho punto o área.
Así mismo, en los sistemas críticos de seguridad, como por ejemplo los sistemas de posicionamiento, deben, así mismo, funcionar unos sistemas de control con el fin de hacer posible la navegación hasta el punto de terminación.
El objetivo de la presente invención consiste en proporcionar un volumen estimado de una operación de terminación segura en el que cada coordenada del volumen satisfaga los requisitos para proporcionar una 5 trayectoria de planeo segura hasta un punto de terminación aprobado, volumen que puede ser utilizado para planificar una ruta de vuelo y una ruta de terminación en caso de emergencia.
Sumario de la Invención
La invención, tal y como se define, en las reivindicaciones 1 , 3 y 9 proporciona un procedimiento para la estimación de un volumen de operaciones de terminación segura respecto de un vehículo no tripulado que haga 10 posible un vuelo seguro en áreas no designadas, esto es, en áreas que no están reservadas explícitamente al ejército. El procedimiento está diseñado para ser completamente previsible, lo que significa que la operación del vehículo debe ser prevista incluso si se interrumpe la comunicación o el contacto con el vehículo. El volumen de una operación de terminación segura puede ser utilizado como un parámetro de limitación al planificar una ruta regular, mientras que un vehículo no tripulado de acuerdo con la invención, está diseñado para no planificar nunca una ruta 15 que no sea segura. El procedimiento puede, así mismo, ser utilizado en vehículos controlados por un piloto, en el que los parámetros del volumen de una operación de terminación segura puedan ser representados al piloto.
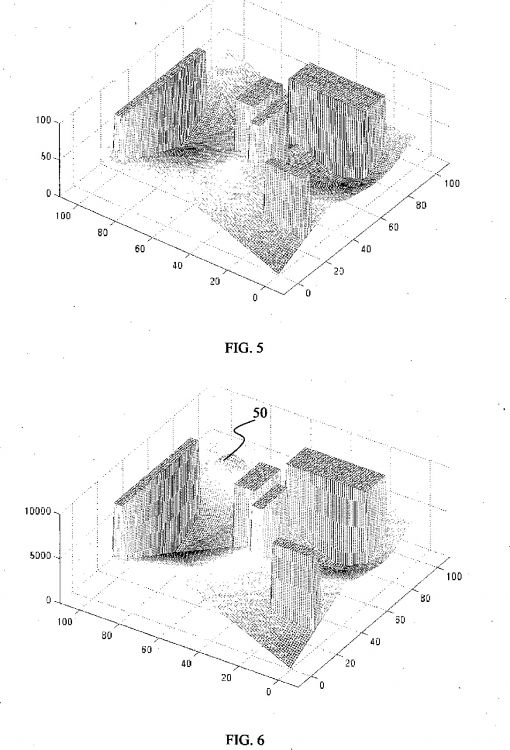
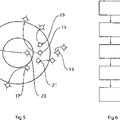
El objetivo de la invención se cumplimenta mediante la provisión de un procedimiento para la creación de una representación de un volumen de una operación de terminación segura que indique la altitud de vuelo permisible más baja para conseguir una trayectoria de planeo de un vehículo hasta un punto de terminación en un área de 20 interés. El procedimiento comprende la etapa de la toma en consideración de zonas de vuelo no permisibles mediante la adición de una altitud de vuelo que se sitúe alrededor de dichas zonas de vuelo permisibles al calcular la altitud de vuelo permisible más baja.
En un aspecto adicional, el procedimiento incluye las etapas de: la discretización del área de interés en áreas discretizadas; la introducción de datos relativos a las zonas de No vuelo y de la relación de Sustentación y 25 Resistencia aerodinámica; la selección de al menos un punto que defina un punto de terminación; la computación de la altitud de vuelo permisible más baja para los puntos situados en posición adyacente al punto que define el punto de terminación, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto que define un punto de terminación; la repetición de la computación de la altitud de vuelo más baja para el punto situado en posición adyacente al punto computado con 30 anterioridad, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto computado con anterioridad; la repetición de las etapas d - e para todos los puntos de terminación seleccionados hasta que todos los puntos del área discretizada hayan recibido una altitud de vuelo permisible más baja, lo que se traduce en una superficie inferior de un volumen de una operación de terminación segura. 35
Así mismo, la etapa de la introducción de datos comprende así mismo: la adición de los datos reales del terreno del suelo que se consideran a la hora de calcular el volumen de una operación de terminación segura.
La invención, divulga así mismo, una representación de un volumen de terminación segura creada...
Reivindicaciones:
1. Un procedimiento para la creación de una representación de un volumen de una operación de terminación segura que indica la altitud de vuelo permisible más baja para conseguir una trayectoria de planeo de un vehículo hasta un punto de terminación de un área de interés, caracterizado por la etapa de la toma en consideración de zonas de vuelo no permisibles mediante la adición de la altitud de vuelo de forma que rodee dichas zonas de vuelo no 5 permisibles al calcular la altitud de vuelo permisible más baja, procedimiento que incluye, así mismo, las etapas de:
a. la discretización del área de interés en áreas discretizadas;
b. la introducción de datos relativos a las zonas de No vuelo y la relación de Sustentación y Resistencia Aerodinámica;
c. la selección de al menos un punto que defina un punto de terminación; 10
d. la conmutación de la altitud de vuelo permisible más baja para los puntos adyacentes al punto que define el punto de terminación, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto que define un punto de terminación;
e. la repetición de la computación de la altitud de vuelo permisible más baja para cada punto adyacente al 15 punto computado con anterioridad, en el que la altitud de vuelo permisible más baja es computada para admitir el planeo del vehículo hasta la altitud de vuelo permisible más baja del punto computado con anterioridad; y
f. la repetición de las etapas d - e para todos los puntos de terminación seleccionados hasta que todos los puntos del área discretizada hayan recibido una altitud de vuelo permisible más baja, dando como 20 resultado una superficie inferior de un volumen de una operación de terminación segura.
2. El procedimiento de acuerdo con la reivindicación 1, en el que la etapa de la introducción de datos comprende así mismo:
la adición de los datos del terreno del suelo efectivo que son tenidos en cuenta al calcular el volumen de una operación de terminación segura. 25
3. Una representación de un volumen de una operación de terminación segura creado de acuerdo con el procedimiento de cualquiera de las reivindicaciones 1 y 2.
4. El uso de la representación de un volumen de una operación de terminación segura de acuerdo con la reivindicación 3 para la planificación de una ruta de vuelo mediante la determinación de la altitud del plan de vuelo para que nunca caiga por debajo de la altitud permisible más baja de acuerdo con el volumen de una operación de 30 terminación segura.
5. El uso de la representación del volumen de una operación de terminación segura de acuerdo con la reivindicación 3 para obtener un mapa de terminación (130) mediante la inclusión, así mismo, de las siguientes etapas:
- la discretización del mapa en áreas; y
- la determinación, para cada una de dichas etapas discretizadas, de una altitud a partir de dicho volumen 35 de una operación de terminación segura y de un vector que indique la dirección en la que debe desplazarse un vehículo con el fin de alcanzar un punto de terminación seguro.
6. El uso de la representación de un volumen de una operación de terminación segura de acuerdo con la reivindicación 3 para la planificación de una ruta de emergencia de un vehículo cuando se produzca un fallo en el vehículo, que provoque que el vehículo no pueda completar su ruta determinada de antemano en un área de interés 40 mediante la inclusión de las siguientes etapas:
a. la recepción de una indicación de que se ha producido el fallo;
b. el posicionamiento del vehículo;
c. la determinación de los parámetros de control;
d. el control del vehículo para que se desplace de acuerdo con los parámetros de control determinados; 45
en el que dichos parámetros de control incluyen una altitud leída a partir de dicho volumen de una operación de terminación segura que indica la altitud de vuelo permisible más baja para conseguir una trayectoria de planeo hasta un punto de terminación, y una dirección leída a partir de los vectores que señalan en la dirección hacia el punto de terminación.
7. El uso de acuerdo con la reivindicación 6, en el que la etapa de determinación de los parámetros de control 5 incluye así mismo la selección de un volumen de una operación de terminación segura que indica la altitud de vuelo permitida más baja y una dirección en base a qué tipo de fallo se ha producido y que se indica.
8. El uso de acuerdo con la reivindicación 6, en el que la etapa de la determinación de los parámetros de control incluye, así mismo, la selección de un volumen de una operación de terminación segura que indica la altitud de vuelo permisible más baja y una dirección en base a una indicación acerca de la dirección en la que el vehículo se está 10 desplazando.
9. Un sistema de control para el control de un vehículo no tripulado, sistema de control que comprende:
a. un sistema de supervisión funcional que recibe indicaciones cuando se produce un fallo;
b. una unidad de posicionamiento que puede posicionar el vehículo con la información de posicionamiento; 15
c. una unidad de procesamiento central que determina los parámetros de control; y
d. un sistema de control de vuelo que comprende:
i. un subsistema de control de misión principal adaptado para controlar el movimiento del vehículo no tripulado de acuerdo con una ruta predefinida, en el que los parámetros de control han sido tomados en cuenta; y 20
ii. un subsistema de control de emergencia adaptado para controlar el movimiento del vehículo no tripulado de acuerdo con los parámetros de control recibidos desde la unidad de procesamiento central;
caracterizado porque dicho subsistema de control utiliza la representación de un volumen de una operación de terminación segura de acuerdo con la reivindicación 3, por medio de lo cual dichos 25 parámetros de control incluyen una altitud leída a partir de dicha representación que indica la altitud de vuela permitida más baja que define un punto de terminación para conseguir una trayectoria de planeo del vehículo hasta el punto de terminación, en el que se calcula la altitud permisible más baja para los puntos adyacentes al punto que define el punto de terminación.
10. El sistema de control de acuerdo con la reivindicación 9, en el que los parámetros de control incluyen, así mismo, 30 una dirección leída a partir de un mapa de vectores que señala en la dirección hacia el punto de terminación en base a la posición recibida de la unidad de posicionamiento cuando se indica un fallo mediante el sistema de supervisión funcional.
11. El sistema de control de acuerdo con la reivindicación 9, en el que el sistema de control comprende, así mismo, un almacenamiento de memoria con el fin de almacenar los volúmenes de una operación de terminación segura que 35 indican la altitud de vuelo permisible más baja para conseguir una trayectoria de planeo hasta el punto de terminación, y una pluralidad de mapas con vectores que señalan en la dirección hacia el punto de terminación.
12. Un producto de programa informático que, cuando es ejecutado en una computadora, ejecuta un procedimiento de creación de un volumen de una operación de terminación segura de acuerdo con cualquiera de las reivindicaciones 1 y 2. 40
Patentes similares o relacionadas:
PROCEDIMIENTO Y APARATO PARA GENERAR AL MENOS UNA TRAYECTORIA DE VUELO VOTADA DE UN VEHÍCULO, del 3 de Noviembre de 2011, de SAAB AB: Un aparato para un primer vehículo , adaptado para generar una trayectoria votada de al menos un vehículo , estando configurado […]
 SISTEMA Y PROCEDIMIENTO PARA TRANSFERIR UN AVION DE UN ESTADO DE VUELO SITUADO FUERA DE UN INTERVALO DE ESTADOS DE VUELO ADMISIBLES A UN ESTADO DE VUELO SITUADO DENTRO DEL INTERVALO DE ESTADOS DE VUELO ADMISIBLES, del 18 de Mayo de 2010, de EADS DEUTSCHLAND GMBH: Sistema para transferir un avión de un estado de vuelo situado fuera de un intervalo de estados de vuelo admisibles a un estado de vuelo situado […]
SISTEMA Y PROCEDIMIENTO PARA TRANSFERIR UN AVION DE UN ESTADO DE VUELO SITUADO FUERA DE UN INTERVALO DE ESTADOS DE VUELO ADMISIBLES A UN ESTADO DE VUELO SITUADO DENTRO DEL INTERVALO DE ESTADOS DE VUELO ADMISIBLES, del 18 de Mayo de 2010, de EADS DEUTSCHLAND GMBH: Sistema para transferir un avión de un estado de vuelo situado fuera de un intervalo de estados de vuelo admisibles a un estado de vuelo situado […]
 PROCEDIMIENTO Y UNIDAD DE CALCULO PARA CALCULAR UNA TRAYECTORIA DE VUELO DE RECUPERACION, del 31 de Marzo de 2010, de SAAB AB: Una unidad de cálculo de colisión con el suelo concebida para calcular una trayectoria de vuelo de recuperación (9a-c) para una aeronave (3a-c) con el fin de evitar […]
PROCEDIMIENTO Y UNIDAD DE CALCULO PARA CALCULAR UNA TRAYECTORIA DE VUELO DE RECUPERACION, del 31 de Marzo de 2010, de SAAB AB: Una unidad de cálculo de colisión con el suelo concebida para calcular una trayectoria de vuelo de recuperación (9a-c) para una aeronave (3a-c) con el fin de evitar […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]