Pinza para apretar chapas, utilizada en asociación con un brazo manipulador.
Pinza destinada a apretar chapas y utilizada en asociación con un brazo manipulador,
denominado robot, y quecomprende:
- un bastidor (10) rígido, unido a un soporte (40), tal como un pie rígido o el citado robot,
- un subconjunto móvil, unido al citado bastidor (10), y que comprende:
- un primer brazo (3), denominado fijo,
- un segundo brazo (8), denominado móvil, y
- un accionador (4), que se apoya sobre el citado brazo fijo (3) para desplazar el brazo (8) móvil con respectoal brazo (3) fijo, según: un primer grado de libertad, en traslación o rotación, a fin de cerrar o de abrir la pinza para,respectivamente, apretar un ensamblaje de chapas (1) entre los brazos fijo y móvil (3, 8) o liberar el ensamblaje dechapas (1), y
- un módulo de equilibrado (11), que introduce un grado de libertad suplementario, en traslación o rotación,entre, por una parte, el citado soporte (40) y, por otra, un conjunto que integra el citado subconjunto móvil (3, 4, 8) afin de equilibrar los esfuerzos ejercidos sobre las extremidades (2, 9) respectivamente de los brazos fijo y móvil (3, 8)en posición de cierre, caracterizada porque el citado módulo de equilibrado (11) está desplazado al exterior delconjunto constituido por el citado subconjunto móvil (2, 3, 4, 8, 9) y el citado bastidor (10), formando así un móduloindependiente, en uno de los lados de la pinza propiamente dicha, en interfaz entre el citado soporte (40) y el citadobastidor (10) y/o subconjunto móvil (2, 3, 4, 8, 9).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/051290.
Solicitante: ARO Welding Technologies.
Nacionalidad solicitante: Francia.
Dirección: 1, Avenue de Tours 72500 Château-du-Loir FRANCIA.
Inventor/es: BOYER, JEAN, NOEL, TIBERGHIEN, OLIVIER, CHEVASSU, DANIEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23K11/31 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 11/00 Soldadura por resistencia; Seccionamiento por calentamiento por resistencia. › Portaelectrodos (no limitados a la soldadura por resistencia eléctrica o al seccionamiento por calentamiento por resistencia B23K 37/02).
PDF original: ES-2400259_T3.pdf
Fragmento de la descripción:
Pinza para apretar chapas, utilizada en asociación con un brazo manipulador.
La presente invención concierne a cualquier tipo de pinzas destinadas a apretar chapas y utilizadas en asociación con un brazo manipulador, denominado robot. El citado robot puede servir, ya sea para desplazar la herramienta 5 alrededor del ensamblaje que hay que realizar o inversamente para desplazar el ensamblaje delante de la herramienta, a su vez fijada entonces a un pie rígido.
De modo más particular, esta invención concierne a las pinzas de soldar por resistencia eléctrica, del tipo general que comprende un bastidor rígido, unido a un soporte tal como pie rígido o robot manipulador, un subconjunto móvil, unido al bastidor y que a su vez comprende un primer electrodo de soldadura, denominado fijo, solidario de un 10 primer brazo, denominado fijo, un segundo electrodo de soldadura, denominado móvil, solidario de un segundo brazo, denominado móvil, y un accionador de soldadura, que se apoya sobre el citado brazo fijo para desplazar el brazo y el electrodo móviles con respecto al brazo y al electrodo fijos, según un primer grado de libertad, en traslación o en rotación, a fin de cerrar o de abrir la pinza para respectivamente, apretar un conjunto de chapas que hay que soldar entre los electrodos (aproximados uno al otro por el accionador) o liberar el ensamblaje de chapas (separando los electrodos uno del otro por el accionador) , comprendiendo la pinza igualmente un módulo de equilibrado, que introduce un grado de libertad suplementario, en traslación o en rotación entre el citado soporte, por una parte, y, por otra, un conjunto que integra el citado subconjunto móvil, a fin de equilibrar los esfuerzos ejercidos sobre los electrodos, especialmente en posición de cierre. Una pinza de este tipo está descrita en el documento DEA-198 01 652.
En las pinzas de soldar por resistencia eléctrica del estado de la técnica, según el trabajo que hay que realizar, son posibles dos cinemáticas para el brazo y el electrodo móviles:
- el primer grado de libertad es una traslación del brazo y del electrodo móviles con respecto al brazo fijo que lleva el electrodo fijo, por guiado lineal asegurado por el accionador de soldadura, que es un accionador lineal de cualquier tipo conveniente conocido, hidráulico, neumático, mecánico o eléctrico, que desplaza directamente el brazo y el
electrodo móviles, denominándose entonces la pinza en C o en J, como está representado en las figuras 1 a 5 anejas, o
- el segundo grado de libertad es una rotación del brazo y del electrodo móviles, alrededor de un eje del bastidor, con respecto al brazo fijo que lleva el electrodo fijo, denominándose entonces la pinza en X o en tijeras, pudiendo ser todavía el accionador de soldadura un accionador lineal, ya sea montado pivotante por su cuerpo sobre el 30 soporte de brazo fijo alrededor de un eje paralelo al eje de articulación del brazo y del electrodo móviles, o bien fijado de modo rígido a este mismo soporte de brazo fijo, permitiendo entonces una unión mecánica adecuada con 2 grados de libertad que el vástago del gato que se desplaza linealmente según una dirección dada siga los movimientos de basculamiento del brazo móvil alrededor del eje de articulación. El esfuerzo de pivotamiento del brazo y del electrodo móviles es transmitido del accionador al brazo móvil por una palanca, cuyo brazo móvil es
solidario, que pivota alrededor del eje de articulación, y sobre la cual pivota la extremidad del vástago del accionador, como está representado en las figuras 6 y 7 anejas.
En las figuras 1 a 7, las mismas referencias designan componentes idénticos o análogos en las pinzas en C y en X representadas en diferentes posiciones descritas en lo que sigue.
Para asegurar la soldadura eléctrica por puntos de un ensamblaje de chapas 1, las pinzas en C de las figuras 1 a 5
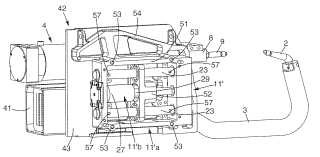
comprenden principalmente un electrodo fijo 2 montado en la extremidad de un brazo fijo 3 solidario del cuerpo 5 de un accionador de soldadura 4, por ejemplo de tipo de vástago neumático, en el que el pistón 6 y el vástago 7 son solidarios en desplazamiento de un brazo móvil 8, en prolongación con el vástago 7, cuya extremidad libre soporta un electrodo móvil 9, constituyendo estos componentes un subconjunto montado móvil, según un grado de libertad suplementario que, en estas figuras, corresponde igualmente a una traslación, sobre un bastidor 10 fijado 45 rígidamente a un soporte, que puede ser un robot manipulador o un pie rígido, siendo proporcionado este grado de libertad suplementario del subconjunto (2-9) con respecto al bastidor 10 por un módulo 11 descrito en lo que sigue.
Asimismo, en las pinzas en X de las figuras 6 y 7, el electrodo fijo 2 y el brazo fijo 3 son solidarios de un soporte de brazo rígido 12 montado en un eje de pivote 13 alrededor del cual pivota una palanca rígida 14 que soporta al brazo móvil 8 y al electrodo móvil 9, siendo el accionador de soldadura 4, igualmente lineal, pivotante por su cuerpo 5
sobre el soporte 12 alrededor de un eje 15 paralelo al eje 13, mientras que la extremidad libre del vástago 7 del accionador 4 acciona a la palanca 14, sobre la cual el vástago 7 pivota alrededor de un eje 16 igualmente paralelo al eje 13, de modo que manda los pivotamientos del brazo 8 y del electrodo 9 móviles con respecto al brazo 3 y al electrodo 2 fijos por rotación alrededor del eje 13 soportado por una consola rígida 17 del bastidor 10 de la herramienta, fijado rígidamente al soporte de herramienta (pie fijo o robot manipulador) .
Al subconjunto de los brazos (3, 8) y de los electrodos (2, 9) fijos y móviles y del accionador 4 de soldadura se da un grado de libertad suplementario, que es una rotación, con respecto al bastidor 10 por pivotmiento de este
subconjunto con el soporte de brazo 12 y la palanca 14 que pivota alrededor del eje 13 gracias a un módulo 21, cuya estructura y funciones se describen en lo que sigue.
Cuando el procedimiento de ensamblaje por soldadura, que puede comenzar cuando las chapas 1 quedan apretadas entre los electrodos 2 y 9, está automatizado, la pinza o el ensamblaje de las chapas 1 que hay que soldar es llevada o llevado a la extremidad de un brazo articulado de un robot manipulador. Pero, en el modo más habitual de puesta en práctica del procedimiento de soldadura, como se describe en lo que sigue, la pinza es transportada por el robot y situada delante del ensamblaje de chapas 1, siendo la problemática la misma en el caso inverso en que el ensamblaje de chapas 1 sea transportado y esté situado delante de la pinza.
Según la programación de trayectoria, el robot sitúa el electrodo fijo 2 de la pinza delante del ensamblaje de chapas 1 que hay que soldar. Sin embargo, por razones técnicas vinculadas con:
- la precisión de posicionamiento del robot;
- la incertidumbre sobre la geometría de la pinza (tolerancias de mecanizado y de montaje de sus componentes, desgaste eventual de los electrodos 2 y 9 durante el procedimiento) ; y
- el error en cuanto a la posición real del ensamblaje de chapas 1 con respecto a su posición teórica,
es necesario, durante la programación del robot, prever una cierta distancia entre la posición teórica del electrodo fijo 2 al final del brazo fijo 3 y la posición teórica del ensamblaje de chapas 1.
Esta distancia debe permitir, durante las fases dinámicas de desplazamiento del robot, garantizar cualquier ausencia de contacto entre el electrodo 2 del brazo fijo 3 y el ensamblaje de chapas 1, a fin de evitar cualquier rozamiento y/o apoyo de este electrodo 2 en las chapas 1 que provoque marcas, rayaduras o deformaciones de las chapas 1.
En la práctica, en el caso de un procedimiento de soldadura por resistencia, el valor de esta distancia está comprendido entre aproximadamente 5 mm y aproximadamente 15 mm y es denominado recorrido de destalonado.
A continuación de esta fase de posicionamiento de la pinza con respecto al ensamblaje de chapas 1, se libera en la pieza el grado de libertad suplementario mencionado anteriormente, de modo que el subconjunto móvil que integra los electrodos y brazos fijos y móviles (2, 3, 8 y 9) y el accionador de soldadura 4 pueda entonces efectuar un movimiento relativo con respecto a su bastidor 10, pudiendo ser este movimiento relativo, autorizado por el módulo 11 o 21 antes citado, una traslación, paralela a la del brazo móvil 8, como en las pinzas en C de las figuras 1 a 5, o una rotación alrededor del eje 13, como en las en X de las figuras 6 y 7, teniendo por objetivo esta operación, denominada operación de aproximación, permitir al electrodo 2 del brazo fijo 3 entrar en contacto con el ensamblaje... [Seguir leyendo]
Reivindicaciones:
1. Pinza destinada a apretar chapas y utilizada en asociación con un brazo manipulador, denominado robot, y que comprende:
- un bastidor (10) rígido, unido a un soporte (40) , tal como un pie rígido o el citado robot,
- un subconjunto móvil, unido al citado bastidor (10) , y que comprende:
- un primer brazo (3) , denominado fijo,
- un segundo brazo (8) , denominado móvil, y
- un accionador (4) , que se apoya sobre el citado brazo fijo (3) para desplazar el brazo (8) móvil con respecto al brazo (3) fijo, según: un primer grado de libertad, en traslación o rotación, a fin de cerrar o de abrir la pinza para, respectivamente, apretar un ensamblaje de chapas (1) entre los brazos fijo y móvil (3, 8) o liberar el ensamblaje de chapas (1) , y
- un módulo de equilibrado (11) , que introduce un grado de libertad suplementario, en traslación o rotación, entre, por una parte, el citado soporte (40) y, por otra, un conjunto que integra el citado subconjunto móvil (3, 4, 8) a fin de equilibrar los esfuerzos ejercidos sobre las extremidades (2, 9) respectivamente de los brazos fijo y móvil (3, 8) en posición de cierre, caracterizada porque el citado módulo de equilibrado (11) está desplazado al exterior del conjunto constituido por el citado subconjunto móvil (2, 3, 4, 8, 9) y el citado bastidor (10) , formando así un módulo independiente, en uno de los lados de la pinza propiamente dicha, en interfaz entre el citado soporte (40) y el citado bastidor (10) y/o subconjunto móvil (2, 3, 4, 8, 9) .
2. Pinza de acuerdo con la reivindicación 1, caracterizada porque el citado módulo de equilibrado (11) está combinado con medios de aproximación (11b) , que permiten llevar la extremidad fija (2) en contacto con el ensamblaje de chapas (1) , por desplazamiento del citado subconjunto móvil (2, 3, 4, 8, 9) tras la liberación del citado grado de libertad suplementario, a continuación de un posicionamiento inicial de la pinza abierta con una holgura inicial entre el ensamblaje de chapas (1) y la extremidad fija.
3. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 y 2, caracterizada porque el citado módulo de equilibrado (11) está combinado con medios de destalonado (11b) que permite llevar y mantener el subconjunto móvil (2, 3, 4, 8, 9) en la posición de referencia, a tope con respecto al citado soporte (40) .
4. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizada porque el citado módulo de equilibrado (11) está montado en interfaz entre dos partes (38, 39) del citado soporte (40) , de las cuales una primera parte (38) es solidaria del citado bastidor (10) y/o del subconjunto móvil (2, 3, 4, 8, 9) , y la segunda parte (39) constituye el resto del soporte (40) o es solidaria del resto del soporte (40) .
5. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 4, caracterizada porque el citado módulo de equilibrado (11) se fija a un flanco del bastidor (10) que soporta al subconjunto móvil (2, 3, 4, 8, 9) y/o del cuerpo (5) del accionador del subconjunto móvil.
6. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 5, caracterizada porque el citado módulo de equilibrado (11) autoriza desplazamientos en traslación o en rotación del subconjunto móvil (2, 3, 4, 8, 9) y de su bastidor (10) con respecto al soporte (40) .
7. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 6, caracterizada porque el módulo de equilibrado
(11) comprende:
- al menos una caja de guía (11a) del movimiento relativo, según el grado de libertad suplementario, entre el subconjunto móvil (2, 3, 4, 8, 9) con su bastidor (10) y el soporte (40) ,
- al menos dos medios elásticos (25; 27a, 27b) de equilibrado que solicitan de manera antagonista al menos a un órgano (24, 28) que está guiado en el interior de la citada caja de guía (11a) o es solidario en desplazamiento de la citada caja (11a) , y al menos a un accionador (11b) de aproximación, de destalonado y de bloqueo y mantenimiento del subconjunto móvil (2, 3, 4, 8, 9) en la posición destalonada.
8. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 7, caracterizada porque el módulo de equilibrado (11) está colocado en una pinza de tipo en C, con movimiento lineal del brazo móvil (8) con respecto al brazo fijo (3) , de modo que los desplazamientos en traslación autorizados por el citado módulo (11) son sensiblemente paralelos a los desplazamientos del brazo móvil (8) , y por tanto sensiblemente perpendiculares al plano de ensamblaje de las chapas (1) .
9. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 7, caracterizada porque el módulo de equilibrado (11) está colocado en una pinza en X, con movimiento de rotación del brazo móvil (8) con respecto al brazo fijo (3) , de modo que los desplazamientos en traslación autorizados por el citado módulo (11) son sensiblemente perpendiculares al plano de ensamblaje de las chapas (1) , y por tanto sensiblemente paralelos a la dirección de las dos extremidades (2, 9) extremo con extremo en posición de cierre de la pinza.
10. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 9, caracterizada porque el módulo de equilibrado (11’) está montado en una primera cara (43) de una placa de interfaz (42) que está vuelta hacia un órgano (38, 39) solidario del soporte (40) y en cuyo módulo (11’) se apoya para desplazar la citada placa de interfaz (42) , que es solidaria por su segunda cara (44) del bastidor (10) y/o del subconjunto móvil (2, 3, 4, 8, 9) .
11. Pinza de acuerdo con la reivindicación 10, caracterizada porque el módulo de equilibrado (11’) es apto para montarse en la primera cara (43) de la citada placa de interfaz (42) , en una o la otra de al menos dos posiciones que autorizan desplazamientos en traslación sensiblemente paralela a respectivamente una o la otra de al menos dos direcciones inclinadas entre sí, y preferentemente sensiblemente perpendiculares entre sí, en el plano de la citada primera cara (43) , según que la pinza sea del tipo en C, o en X, respectivamente con desplazamientos en traslación
o en rotación del brazo móvil (8) con respecto al brazo fijo (3) .
12. Pinza de acuerdo con una cualquiera de las reivindicaciones 10 y 11, caracterizada porque la citada segunda cara (44) de la placa de interfaz (42) está equipada con medios de fijación rígida (46; 45a) del brazo fijo (3) y del accionador (4) del subconjunto móvil (2, 3, 4, 8, 9) .
13. Pinza de acuerdo con una cualquiera de las reivindicaciones 1 a 12, caracterizada porque la herramienta es una pinza de soldar por resistencia y porque las extremidades (2, 9) respectivamente de los brazos fijo y móvil (3, 8) son electrodos de soldadura.
14. Pinza de acuerdo con la reivindicación 13, caracterizada porque un transformador (41) de soldadura está integrado en el conjunto del subconjunto móvil (2, 3, 4, 8, 9) y del bastidor (10) , y es solidaria del bastidor (10) y/o del brazo fijo (3) .
15. Pinza de acuerdo con la reivindicación 14, como relacionada con una cualquiera de las reivindicaciones 10 a 12, caracterizada porque el transformador (41) de soldadura está fijado rígidamente a la citada segunda cara (44) de la placa de interfaz (42) .
16. Pinza de acuerdo con una cualquiera de las reivindicaciones 10 a 12 y 15, caracterizada porque la citada placa de interfaz (42) está perforada por una abertura de paso (55) dispuesta para la recepción de un eje (13) de articulación del brazo móvil (8) en rotación, montándose preferentemente el citado eje (13) de articulación igualmente en una placa de refuerzo (56) fijada rígidamente entre el citado eje (13) de articulación y el accionador
(4) de soldadura, en una pinza de tipo en X.
17. Pinza de acuerdo con una cualquiera de las reivindicaciones 15 y 16, como relacionada con la reivindicación 12, caracterizada porque dos conductores eléctricos (48, 49) están fijados a la salida (47) del transformador (41) de soldadura y destinados cada uno a la alimentación eléctrica de uno respectivamente de los dos brazos móvil (8) y fijo (3) del subconjunto móvil (2, 3, 4, 8, 9) , extendiéndose el conductor (48) destinado al brazo fijo (3) de la salida (47) del transformador (41) a un manguito (46) de apriete, fijado en saliente a la segunda cara (44) de la placa de interfaz (42) , para la fijación rígida del brazo fijo (3) a la citada placa de interfaz (42) .
18. Pinza de acuerdo con una cualquiera de las reivindicaciones 10, 12 y 15 a 17, como relacionada con la reivindicación 7, caracterizada porque la caja de guía (11’a) comprende un marco rígido rectangular (51) , atravesado paralelamente a dos lados opuestos, preferentemente los lados mayores, por dos columnas de guía (23) fijadas de modo rígido a la citada placa de interfaz (42) espaciadas y paralelas, y guiadas en traslación en sus extremidades sobre cojinetes solidarios del marco (51) , estando fijada al menos una barra (52) solidaria de las columnas (23) y a su vez unida al vástago (29) de un accionador lineal (11’b) de tipo gato, paralelo a las columnas (23) y que se extiende entre ellas, y cuyo cilindro (27) está fijado al marco (51) de la caja (11’) , estando fijado el marco (51) de manera directa o por medio de un soporte intermedio rígido al brazo manipulador o a un pie rígido, o inversamente, estando fijado el marco (51) rígidamente a la primera cara (43) de la placa de interfaz (42) y el subconjunto rígido constituido por las columnas (23) y la o las barras (52) está fijado de modo directo o por medio de un soporte intermedio rígido al brazo manipulador o a un pie rígido, de modo que el accionador (11’b) es apto para mandar la aproximación y el destalonado, estando rodeada al menos una columna (23) de guía por dos muelles helicoidales antagonistas que se apoyan cada uno por una extremidad sobre el marco (51) y por la otra extremidad sobre al menos una de las barras (52) , en el lado opuesto al otro muelle, o siendo el citado accionador (11’b) neumático con dos cámaras de gas a presión a una y otra parte de un pistón unido rígidamente por el vástago (29) al menos a una de las barras (52) , a fin de realizar los dos medios elásticos antagonistas de equilibrado.
ESADOºDE A CNICA
Patentes similares o relacionadas:
Electrodo para una pinza de soldar, del 8 de Julio de 2020, de KME Special Products GmbH: Electrodo para una pinza de soldar que comprende un vástago de electrodo con un capuchón de soldar en el extremo, que está sujeto de manera desprendible a un soporte […]
Dispositivo de soldadura por resistencia, del 29 de Abril de 2020, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de soldadura por resistencia que comprende dos electrodos de soldadura dispuestos de manera opuesta, conectados a una fuente de corriente de soldadura […]
Dispositivo y procedimiento de sujeción de una parte de una pistola de soldadura, del 13 de Noviembre de 2019, de COMAU, INC: Dispositivo de manipulación y conexión de componentes de combinación conectable a un robot de múltiples ejes para ser utilizado en el […]
Robot articulado que lleva un cabezal de soldadura por resistencia eléctrica con electrodos ubicados en el mismo lado, procedimiento correspondiente de soldadura por resistencia eléctrica en un componente a soldar, del 7 de Agosto de 2019, de COMAU S.P.A.: Un robot articulado (R) que lleva un cabezal de soldadura por resistencia eléctrica (T) con electrodos ubicados en el mismo lado, el robot articulado (R) tiene una muñeca […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Dispositivo para la fijación de un peso de compensación en un árbol, del 24 de Julio de 2019, de SCHENCK ROTEC GMBH: Dispositivo para una máquina para equilibrar árboles, para la fijación de un peso de compensación en un árbol con un dispositivo a modo de una pinza que […]
Dispositivo de soldadura por resistencia, del 12 de Junio de 2019, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de soldadura por resistencia que comprende dos electrodos de soldadura que están opuestos entre sí y se pueden conectar a una fuente […]
Dispositivo de soldadura por resistencia con un sensor de carga, del 15 de Mayo de 2019, de Tecna S.p.A: Dispositivo de soldadura por resistencia, que comprende unos medios para mover entre sí un par de mordazas , que soportan unos respectivos electrodos […]