Pasillo móvil y método para controlar el funcionamiento de un pasillo móvil.
Pasillo móvil que comprende un transportador (1), comprendiendo dicho transportador:
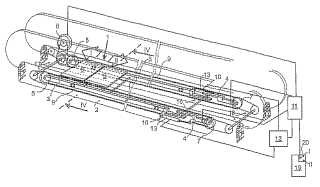
- un bastidor (2) que comprende una primera parte de bastidor (3), sustancialmente fija en su posición, y una segundaparte de bastidor (4), que es controlada para moverse en relación a la primera parte de bastidor (3),
- una rueda motriz (5), montada en un cojinete que permite la rotación sobre la primera mitad de bastidor (3),
- una unidad de potencia (6) para hacer girar la rueda motriz (5),
- una rueda de desvío (7), montada en un cojinete que permite la rotación libre sobre la segunda mitad de bastidor (4),
- superficies de transporte (8) para el transporte de pasajeros,
- al menos un elemento de tracción (9), formado como un bucle sin fin, al que están conectadas las superficies detransporte (8) y siendo dicho elemento de tracción (9) guiado para pasar por encima de la rueda motriz (5) y la rueda dedesvío (7), y
- un dispositivo de tensado (10), que está dispuesto para actuar entre la primera mitad de bastidor (3) y la segundamitad de bastidor (4) para mover linealmente la rueda de desvío (7) separándola de la rueda motriz (5) con el fin deejercer una fuerza de tensado sobre el elemento de tracción (9), caracterizado porque el pasillo móvil comprendemedios de identificación (11) para identificar el estado de accionamiento del transportador (1), y medios de ajuste (12)para ajustar la fuerza de tensado del dispositivo de tensado (10) a diferentes niveles de fuerza en base al estado deaccionamiento identificado; y porque el elemento de tracción (9) comprende una sección superior (14), en la que lassuperficies de transporte (8) conectadas al elemento de tracción se desplazan del primer extremo al segundo extremodel transportador (1) para transportar pasajeros y una sección inferior (15), en la que las superficies de transportevuelven del segundo extremo al primer extremo; y porque el transportador (1) puede ser accionado en la dirección deaccionamiento de avance (I), en la que la dirección de desplazamiento de la sección superior (14) va de la rueda dedesvío (7) a la rueda motriz (5), y en la dirección de accionamiento de retroceso (II), en la que la dirección dedesplazamiento de la sección superior va de la rueda motriz (5) a la rueda de desvío (7); y porque en la dirección deaccionamiento de retroceso (II) la fuerza de tensado del dispositivo de tensado (10) se ajusta a un nivel de fuerza, quees sustancialmente mayor que en la dirección de accionamiento de avance (I).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2006/000283.
Solicitante: KONE CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KARTANONTIE 1 00330 HELSINKI FINLANDIA.
Inventor/es: AULANKO, ESKO, MUSTALAHTI, JORMA, OSSENDORF, MARC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B23/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 23/00 Partes constitutivas de escaleras o de pasillos mecánicos. › para las superficies transportadoras.
- B66B25/00 B66B […] › Control de las escaleras o pasillos mecánicos (pasillos mecánicos del tipo con velocidad variable B66B 21/12; pasamanos del tipo con velocidad variable B66B 23/26).
PDF original: ES-2399649_T3.pdf
Fragmento de la descripción:
Pasillo móvil y método para controlar el funcionamiento de un pasillo móvil
Campo de la invención La presente invención se refiere a un pasillo móvil como se define en el preámbulo de la reivindicación 1. Además, la presente invención se refiere a un método como se define en el preámbulo de la reivindicación 13.
Antecedentes de la invención Un pasillo móvil de la técnica anterior se representa esquemáticamente en las figuras 1 y 2. Este tipo de pasillo móvil comprende un transportador, que transporta pasajeros de un extremo del pasillo móvil del transportador al otro. El transportador comprende un bastidor. El bastidor está dividido en dos partes. La primera parte de bastidor 3 está sustancialmente fija en su posición, y la segunda parte de bastidor 4 es controlada para desplazarse en relación a la primera parte de bastidor. Una rueda motriz 5 está montada sobre la primera parte de bastidor 3 en un cojinete que permite la rotación, y una unidad de potencia 6 está dispuesta para hacer girar dicha rueda motriz. Una rueda de desvío 7 está montada sobre la segunda parte de bastidor 4 en un cojinete que permite la rotación libre. Un elemento de tracción 9 formado como un bucle sin fin, al que están conectadas las superficies de transporte 8, mueve las superficies de transporte 8 a lo largo de una vía de desplazamiento sin fin de tipo anillo y plana, con un elemento de tracción 9 siendo guiado para pasar por encima de la rueda motriz 5 y la rueda de desvío 7. Para lograr una fuerza de tensado y una pretensión adecuadas, un dispositivo de tensado 10 está dispuesto para el elemento de tracción 9, que actúa entre la primera parte de bastidor 3 y la segunda parte de bastidor 4 de manera que trata de mover linealmente la rueda de desvío 7 separándola de la rueda motriz 5. El elemento de tracción 9 comprende una sección superior 14, en la que las superficies de transporte 8 conectadas al elemento de tracción se desplazan desde el primer extremo hasta el segundo extremo del transportador 1 a fin de trasportar pasajeros, y una sección inferior 15, en la que las superficies de transporte vuelven del segundo extremo al primer extremo.
El tensado es necesario para que el elemento de tracción no se deslice saliéndose de la rueda motriz si se transmite fuerza entre el elemento de tracción y la rueda motriz mediante fricción, cuando el elemento de tracción es, por ejemplo, una correa y la rueda motriz es una polea para correas. Del mismo modo, si se transmite fuerza entre el elemento de tracción y la rueda motriz mediante transmisión conformada, tal como cuando el elemento de tracción es una cadena dentada y la rueda motriz y la rueda de desvío son ruedas dentadas, el propósito del tensado es para evitar que la cadena dentada se salga de la rueda dentada.
El documento de patente US6092639A describe un pasillo móvil por medio del cual se controla la tensión de las cadenas de paletas mediante un dispositivo de ajuste cambiando la posición del eje de rotación del engranaje accionado. Un pasillo móvil y un método para controlar el aflojamiento de las cadenas de paletas también se describe en el documento US6695130B1.
El transportador 1 puede ser accionado en la dirección de accionamiento de avance I como se muestra en la figura 1, en la que la dirección de desplazamiento de la sección superior 14 del elemento de tracción va de la rueda de desvío 7 hacia la rueda motriz 5, y en la dirección de accionamiento de retroceso II de la figura 2, en la que la dirección de desplazamiento de la sección superior 14 va de la rueda motriz 5 a la rueda de desvío 7.
Aunque el transportador sería preferiblemente accionado principalmente en la dirección de accionamiento de avance de la figura 1, a veces puede existir la necesidad de accionarlo en la dirección de accionamiento de retroceso de acuerdo con la figura 2.
Un problema es la fuerza de tensado mínima que necesita el elemento de tracción, que es sustancialmente mayor en la dirección de accionamiento de retroceso que en la dirección de accionamiento de avance. Además, la carga ejercida sobre el transportador afecta a la fuerza de tensado necesaria.
La figura 1 muestra la situación de la fuerza en la dirección de accionamiento de avance. En la dirección de accionamiento de avance, la fuerza de tensado mínima es Ftmin = 2 × Fplt +Fput + Fpl
donde Ftmin = fuerza de tensado mínima Fplt = fricción causada por la sección inferior del transportador Fput = fricción causada por la sección superior del transportador Fpl = fricción causada por la carga transportada por el transportador En la dirección de accionamiento de retroceso de la figura 2, la fuerza de tensado mínima es Ftmin = 2 ×Fput + 2x Fpl + Fplt
donde Ftmin = fuerza de tensado mínima Fplt = fricción causada por la sección inferior del transportador Fput = fricción causada por la sección superior del transportador
Fpl = fricción causada por la carga transportada por el transportador
En la dirección de accionamiento de retroceso, el tensado del elemento de tracción debe superar la fuerza de fricción de todo el transportador y de la carga. Por lo tanto, el elemento de tracción debe ser pretensado a una fuerza mucho mayor en comparación con la dirección de accionamiento de avance.
Si el pasillo móvil está equipado con un dispositivo de tensado, que proporciona una fuerza constante, tal como un resorte o similar, tendría que ser dimensionado para proporcionar la fuerza de tensado mayor que requiere la dirección de accionamiento de retroceso.
Un problema con esto es que el elemento de tracción, la rueda motriz y la rueda de desvío se desgastan por tanto 20 rápidamente, en cuyo caso su vida útil y el periodo de mantenimiento se acorta.
Propósito de la invención El propósito de la invención es eliminar los inconvenientes antes mencionados.
En particular, el propósito de la invención es presentar un pasillo móvil y un método, como resultado de lo cual se pueda alargar la vida útil del elemento de tracción.
Sumario de la invención El pasillo móvil de acuerdo con la invención se caracteriza por lo que se describe en la reivindicación 1. Además, el método de acuerdo con la invención se caracteriza por lo que se describe en la reivindicación 13.
El pasillo móvil de acuerdo con la invención comprende medios de identificación para identificar el estado de accionamiento del transportador, y medios de ajuste para ajustar la fuerza de tensado del dispositivo de tensado a diferentes niveles de fuerza en base al estado de accionamiento identificado.
En el método de acuerdo con la invención se identifica el estado de accionamiento del transportador y se ajusta la fuerza de tensado del elemento de tracción sin fin del transportador del pasillo móvil en base al estado de accionamiento identificado.
Una ventaja de la invención es que presenta una forma fácil para ajustar automáticamente la fuerza de tensado del elemento de tracción de acuerdo con un estado de accionamiento previsto, es decir, conocido antes de la puesta en marcha del pasillo móvil, o un estado de accionamiento durante el periodo de accionamiento de manera que el elemento 45 de tracción no esté continuamente sometido a una fuerza de tensado grande, sino sólo en función de las necesidades, en cuyo caso la vida útil del elemento de tracción llega a tener una duración máxima.
Otra ventaja es que se impide eficazmente que se dañen los equipos debido a que la fuerza de tensado es demasiado pequeña.
En una realización del pasillo móvil, los medios de identificación están dispuestos para identificar un cambio en el estado de accionamiento durante el funcionamiento del transportador, y los medios de ajuste están dispuestos para ajustar la fuerza de tensado del dispositivo de tensado a diferentes niveles de fuerza en función del cambio identificado en el estado de accionamiento.
En una realización del pasillo móvil, la dirección de accionamiento del transportador se puede cambiar. Los medios de identificación están dispuestos para identificar el estado de accionamiento, que es la configuración de la siguiente dirección de accionamiento antes de la puesta en marcha del transportador en la dirección de accionamiento definida por la configuración.
En una realización del pasillo móvil, los medios de identificación están dispuestos para identificar el estado de accionamiento, que es la carga ejercida sobre el transportador.
En una realización del pasillo móvil, los medios de identificación están dispuestos para identificar un cambio en la carga ejercida sobre el transportador.
En una realización del pasillo móvil, la... [Seguir leyendo]
Reivindicaciones:
1. Pasillo móvil que comprende un transportador (1) , comprendiendo dicho transportador: -un bastidor (2) que comprende una primera parte de bastidor (3) , sustancialmente fija en su posición, y una segunda parte de bastidor (4) , que es controlada para moverse en relación a la primera parte de bastidor (3) , -una rueda motriz (5) , montada en un cojinete que permite la rotación sobre la primera mitad de bastidor (3) , -una unidad de potencia (6) para hacer girar la rueda motriz (5) , -una rueda de desvío (7) , montada en un cojinete que permite la rotación libre sobre la segunda mitad de bastidor (4) , -superficies de transporte (8) para el transporte de pasajeros, -al menos un elemento de tracción (9) , formado como un bucle sin fin, al que están conectadas las superficies de transporte (8) y siendo dicho elemento de tracción (9) guiado para pasar por encima de la rueda motriz (5) y la rueda de desvío (7) , y -un dispositivo de tensado (10) , que está dispuesto para actuar entre la primera mitad de bastidor (3) y la segunda mitad de bastidor (4) para mover linealmente la rueda de desvío (7) separándola de la rueda motriz (5) con el fin de ejercer una fuerza de tensado sobre el elemento de tracción (9) , caracterizado porque el pasillo móvil comprende medios de identificación (11) para identificar el estado de accionamiento del transportador (1) , y medios de ajuste (12) para ajustar la fuerza de tensado del dispositivo de tensado (10) a diferentes niveles de fuerza en base al estado de accionamiento identificado; y porque el elemento de tracción (9) comprende una sección superior (14) , en la que las superficies de transporte (8) conectadas al elemento de tracción se desplazan del primer extremo al segundo extremo del transportador (1) para transportar pasajeros y una sección inferior (15) , en la que las superficies de transporte vuelven del segundo extremo al primer extremo; y porque el transportador (1) puede ser accionado en la dirección de accionamiento de avance (I) , en la que la dirección de desplazamiento de la sección superior (14) va de la rueda de desvío (7) a la rueda motriz (5) , y en la dirección de accionamiento de retroceso (II) , en la que la dirección de desplazamiento de la sección superior va de la rueda motriz (5) a la rueda de desvío (7) ; y porque en la dirección de accionamiento de retroceso (II) la fuerza de tensado del dispositivo de tensado (10) se ajusta a un nivel de fuerza, que es sustancialmente mayor que en la dirección de accionamiento de avance (I) .
2. Pasillo móvil de acuerdo con la reivindicación 1, caracterizado porque los medios de identificación están dispuestos para identificar un cambio en el estado de accionamiento durante el funcionamiento del transportador, y los medios de ajuste (12) están dispuestos para ajustar la fuerza de tensado del dispositivo de tensado (10) a diferentes niveles de fuerza en base al cambio de estado de accionamiento identificado.
3. Pasillo móvil de acuerdo con la reivindicación 1 ó 2, caracterizado porque la dirección de accionamiento del transportador (1) se puede cambiar; y porque los medios de identificación (11) están dispuestos para identificar el estado de accionamiento, que es la configuración de la siguiente dirección de accionamiento del transportador antes de la puesta en marcha del transportador (1) en la dirección de accionamiento definida por la configuración.
4. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 3, caracterizado porque los medios de identificación están dispuestos para identificar el estado de accionamiento, que es la carga ejercida sobre el transportador (1) .
5. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 4, caracterizado porque los medios de identificación están dispuestos para identificar un cambio de la carga ejercida sobre el transportador (1) .
6. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 5, caracterizado porque la unidad de potencia (6) es un motor; y porque los medios de identificación comprenden medios para determinar el par del motor para identificar la carga.
7. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 6, caracterizado porque los medios de identificación comprenden medios para determinar las tensiones del bastidor (2) del transportador para identificar la carga.
8. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 7, caracterizado porque el dispositivo de tensado
(10) comprende al menos un cilindro hidráulico (13) , que está conectado por un extremo a la primera mitad de bastidor
(3) y por el otro extremo a la segunda mitad de bastidor (4) ; y porque los medios de ajuste comprenden un dispositivo de control (12) , que está adaptado para controlar la presión hidráulica del cilindro hidráulico (13) para seleccionar diferentes niveles de fuerza de tensado.
9. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 8, caracterizado porque la fuerza de tensado del dispositivo de tensado (10) se puede ajustar a al menos dos niveles de fuerza diferentes.
10. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 9, caracterizado porque la fuerza de tensado del dispositivo de tensado (10) se puede ajustar de forma continua a diferentes niveles de fuerza.
11. Pasillo móvil de acuerdo con cualquiera de las reivindicaciones 1 a 10, caracterizado porque el transportador comprende un dispositivo de control (19) , que comprende un conmutador de dirección (20) o similar, que tiene una primera configuración (I) , que corresponde a la dirección de accionamiento de avance del transportador, y una segunda configuración (II) , que corresponde a la dirección de accionamiento de retroceso del transportador; y porque los medios
de identificación (11) están dispuestos para identificar la siguiente dirección de accionamiento del transportador en base a la configuración del conmutador de dirección (20) .
12. Método para controlar el funcionamiento de un pasillo móvil, en el que se identifica el estado de accionamiento del transportador y en el que se ajusta la fuerza de tensado del elemento de tracción sin fin del transportador del pasillo móvil en base al estado de accionamiento identificado, caracterizado porque la fuerza de tensado del elemento de tracción en la dirección de accionamiento de retroceso se ajusta a un nivel de fuerza que es mayor que el nivel de fuerza utilizado en la dirección de accionamiento de avance, con un dispositivo de tensado que mueve linealmente una rueda de desvío separándola de la rueda motriz del transportador con el fin de ejercer una fuerza de tensado sobre el elemento de tracción sin fin del transportador.
13. Método de acuerdo con la reivindicación 12, caracterizado porque se identifica un cambio en el estado de accionamiento durante el funcionamiento del transportador, y la fuerza de tensado del elemento de tracción se ajusta en base al cambio en el estado de accionamiento.
14. Método de acuerdo con la reivindicación 12 ó 13, caracterizado porque la configuración de la siguiente dirección de accionamiento del transportador se identifica a fin de identificar el estado de accionamiento, en base a lo cual la fuerza de tensado es ajustada al nivel de fuerza correspondiente a la dirección de accionamiento mencionada antes de la puesta en marcha del transportador en la dirección de accionamiento definida por la configuración.
15. Método de acuerdo con cualquiera de las reivindicaciones 12 a 14, caracterizado porque se determina la carga del transportador para identificar el estado de accionamiento.
16. Método de acuerdo con cualquiera de las reivindicaciones 12 a 15, caracterizado porque se determina un cambio en la carga del transportador para identificar el estado de accionamiento.
17. Método de acuerdo con cualquiera de las reivindicaciones 12 a 16, caracterizado porque la fuerza de tensado se ajusta a al menos dos niveles de fuerza diferentes de acuerdo con el estado de accionamiento.
18. Método de acuerdo con cualquiera de las reivindicaciones 12 a 17, caracterizado porque la fuerza de tensado se 35 ajusta de forma continua a diferentes niveles de fuerza de acuerdo con el estado de accionamiento.
Patentes similares o relacionadas:
 Sistema de escalera mecánica, del 29 de Julio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica , configurado para:
accionar una escalera mecánica en respuesta a una señal recibida desde una interfaz de usuario situada […]
Sistema de escalera mecánica, del 29 de Julio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica , configurado para:
accionar una escalera mecánica en respuesta a una señal recibida desde una interfaz de usuario situada […]
Un sistema de escalera mecánica, del 17 de Junio de 2020, de KONE CORPORATION: Un sistema de escalera mecánica que comprende: un foso en al menos un primer o un segundo extremo de la escalera mecánica, dicho foso […]
Conjunto de un sensor de supervisión en una escalera mecánica o en un pasillo rodante, del 1 de Abril de 2020, de INVENTIO AG: Escalera mecánica o pasillo rodante, que presenta dos zonas de acceso , respectivamente, con una placa de peine y una zona de transporte dispuesta entre […]
Instalación de transporte de personas con dispositivo de supervisión y de marcación para marcar unidades de marcha dañadas, del 26 de Febrero de 2020, de INVENTIO AG: Instalación de transporte de personas , que presenta: varias unidades de paso ; una placa de peine ; una instalación de supervisión ; […]
Sistema y procedimiento para la supervisión de un transporte de un dispositivo de transporte de personas o bien de una unidad de transporte, del 1 de Enero de 2020, de INVENTIO AG: Sistema , que presenta un dispositivo de transporte de personas , que está configurado como escalera mecánica, pasillo rodante o ascensor y que presenta, además, […]
Sistema de transporte, del 11 de Diciembre de 2019, de KONE CORPORATION: Sistema transportador que comprende una identificación de la presencia de una carga de un transportador; cuyo sistema transportador comprende un motor eléctrico […]
Instalación de transporte de personas con al menos un módulo inversor, del 7 de Diciembre de 2018, de INVENTIO AG: Instalación de transporte de personas , que presenta un motor de accionamiento de corriente trifásica y una instalación […]
Método y sistema de transportador, del 17 de Octubre de 2018, de KONE CORPORATION: Método para accionar un transportador , en cuyo método se alimenta potencia eléctrica a la maquinaria de accionamiento del transportador, caracterizado por […]