ÓRGANO ELÉCTRICO DE ACCIONAMIENTO UTILIZADO COMO CILÍNDRO DE PRESIÓN DE FLUIDO.
Un órgano eléctrico de accionamiento (11) que tiene un cuerpo principal (12) y que puede utilizarse en lugar de un cilindro de presión de fluido que forma parte de una máquina automatizada y tiene un vástago de pistón,
cuyo movimiento de vaivén es controlado mediante una válvula electromagnética, cuyo órgano eléctrico de accionamiento (11) comprende: un cuerpo movible (29) que puede ser desplazado linealmente, correspondiendo el cuerpo movible (29) al vástago de pistón del cilindro de presión de fluido; un motor (19) que tiene un eje giratorio (20); un mecanismo (21, 28) de conversión del movimiento que convierte la rotación del eje giratorio (20) del motor (19) en el movimiento lineal del cuerpo movible (29); un circuito (43) de control del motor, que controla el motor (19); y una memoria (44) que almacena un programa de control para controlar el circuito (43) de control del motor, caracterizándose el órgano eléctrico de accionamiento (11) porque el programa de control tiene, como modo de control para controlar el motor (19), un modo de cilindro de presión de fluido, en el que el órgano eléctrico de accionamiento (11) acciona el cuerpo movible (29) de forma correspondiente a la manera en que es accionado el vástago de pistón cuando el cilindro de presión de fluido es controlado mediante la válvula electromagnética, y en el que el circuito (43) de control del motor controla la activación y la parada del cuerpo movible (29) en el modo de cilindro de presión de fluido, en el que el modo de cilindro de presión de fluido del programa de control se divide en tres modos, cada uno de ellos correspondiente a uno de un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide único de dos posiciones, un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de dos posiciones, y un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de tres posiciones, y en el que el circuito (43) de control del motor controla el motor (19) en uno seleccionado de los tres modos
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08172116.
Solicitante: CKD CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 250, OUJI 2-CHOME KOMAKI-SHI, AICHI 485-8511 JAPON.
Inventor/es: Masuo,Shuzo, Kanada,Tsuyoshi.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Diciembre de 2008.
Clasificación Internacional de Patentes:
- B23Q5/40 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 5/00 Mecanismos de propulsión o de avance; Disposición de los mecanismos de control a este efecto (control automático B23Q 15/00; copiado B23Q 33/00, B23Q 35/00; especialmente adaptados a las máquinas de escariar o de taladrar B23B 39/10, B23B 47/02). › por un árbol, p. ej. una rosca hembra.
- G05B19/042N
- G05B19/05N
Clasificación PCT:
- B23Q5/10 B23Q 5/00 […] › propulsados principalmente por medios eléctricos.
- F15B9/09 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F15 DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO; HIDRAULICA O NEUMATICA EN GENERAL. › F15B SISTEMAS QUE FUNCIONAN POR MEDIO DE FLUIDOS EN GENERAL; DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO, p. ej. SERVOMOTORES; DETALLES DE LOS SISTEMAS DE FLUIDO A PRESION, NO PREVISTOS EN OTRO LUGAR. › F15B 9/00 Servomotores con acción de seguimiento, es decir, en los cuales la posición del órgano accionado corresponde a la del órgano que controla. › con medios de control eléctricos.
- G05B19/042 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › que utilizan procesadores digitales (G05B 19/05 tiene prioridad).
- G05B19/05 G05B 19/00 […] › Controladores lógicos programables, p. ej. que simulen las interconexiones lógicas de señales según diagramas en escalera o gráficos de funciones.
- H02K41/02 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 41/00 Sistemas de propulsión en los cuales un elemento rígido se desplaza a lo largo de un camino bajo los efectos de la acción dinamoeléctrica que se ejercen entre este elemento y un flujo magnético que se propaga a lo largo del camino. › Motores lineales; Motores seccionales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361892_T3.pdf
Fragmento de la descripción:
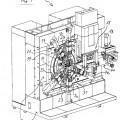
Una placa 17 de montaje del motor está fijada al alojamiento 12 del cilindro mediante tornillos 18 (representados únicamente en la fig. 1B), con el fin de cubrir la abertura trasera del orificio de acomodación 13. La placa 17 de montaje del motor sirve, también, como miembro para impedir que se caiga la tapa 15 de culata. Un orificio 15a está formado en la tapa 15 de culata. La placa 17 de montaje del motor tiene un orificio en el centro, que corresponde al orificio 15a de la tapa de culata. Un motor 19 está unido a la placa 17 de montaje del motor, extendiéndose su eje giratorio 20 a través del orificio de la placa 17 de montaje del motor. El extremo distal del eje giratorio 20 llega al interior del orificio 15a. El motor 19 gira tanto hacia delante como en sentido inverso. Un eje roscado 21 está soportado a rotación por la tapa 15 de culata en su extremo proximal con un cojinete
22. El eje roscado 21 es parte de un mecanismo de tornillo de bolas o de un mecanismo de conversión del movimiento, que convierte la rotación del eje giratorio 20 en un movimiento lineal. Un anillo en C 23 está fijado en la tapa 15 de culata. El anillo en C 23 hace contacto con el anillo exterior del cojinete 22. Un separador 24 y un anillo en C 25 están fijados al eje roscado 21. El separador 24 y el anillo en C 25 hacen contacto con el anillo interior del cojinete 22. El extremo proximal del eje roscado 21 está acoplado al eje giratorio 20 mediante un acoplamiento 26. Un miembro de amortiguación 27 está fijado al extremo delantero de la tapa 15 de culata. Parte del miembro de amortiguación 27 sobresale hacia delante desde la cara extrema delantera de la tapa 15 de culata. El miembro de amortiguación 27 es, por ejemplo, un anillo de caucho. El tornillo de bolas, o el mecanismo de conversión del movimiento, incluye una tuerca de bolas 28. Un vástago de salida 29, que constituye un cuerpo movible, está fijado a la tuerca de bolas 28. El vástago de salida 29 se extiende a través de la tapa 16 de vástago. El vástago de salida 29 es cilíndrico y tiene un orificio cuyo diámetro es mayor que el diámetro exterior del eje roscado 21. El vástago de salida 29 está montado en el lado delantero de la tuerca de bolas 28 en el extremo trasero del orificio. Una placa extrema 30 está fijada al extremo delantero del vástago de salida 29 mediante un tornillo de fijación 31 en una posición más próxima a un extremo. El vástago de guía 32, que se extiende a través del orificio de inserción 14, está fijado a una parte de la placa extrema 30 cerca del otro extremo, mediante un tornillo de fijación 33. El vástago de guía 32 está soportado por un casquillo 34 de forma que pueda ser desplazado en dirección adelante-atrás en el orificio de inserción 14. El vástago de guía 32 impide que la placa extrema 30 sea hecha girar de manera enteriza con el vástago de salida 29. Así, cuando el eje roscado 21 es hecho girar por el motor 19, el vástago de salida 29 es movido linealmente junto con la tuerca de bolas 28. Un miembro de amortiguación 16b está fijado al extremo trasero de la tapa 16 de vástago. Parte del miembro de amortiguación 16b sobresale hacia atrás desde la cara extrema trasera de la tapa 16 de vástago. El miembro de amortiguación 16b es, por ejemplo, un anillo de caucho. Un miembro anular 35 está montado en el extremo proximal del vástago de salida 29. El miembro anular 35 está fijado a una parte de pestaña 28a que está formada en el extremo proximal de la tuerca de bolas 28 mediante un tornillo de fijación 36. Una garganta anular está formada en la superficie circunferencial exterior del miembro anular 35. Un imán permanente M que sirve como parte de detección y un anillo de desgaste 35a, están montados en la garganta anular. Es decir, el imán permanente M que sirve como parte de detección se mueve de manera enteriza con el vástago de salida 29. El diámetro exterior del miembro anular 35 es menor que el diámetro del orificio de acomodación 13, de forma que solamente el anillo de desgaste 35a desliza en el orificio de acomodación 13. Como se muestra en la fig. 1B, un par de gargantas de unión 38 están formadas en cada una de las superficies laterales izquierda y derecha, 12a, 12b, del alojamiento 12 del cilindro, que funciona como cuerpo principal del órgano eléctrico de accionamiento. Las gargantas de unión 38 se utilizan para unir un detector de posición 37, que detecta el imán permanente M. Las gargantas de unión 38 están formadas paralelas con el eje roscado 21 y se extienden en la dirección adelante-atrás del alojamiento 12 del cilindro. Un detector de posición 37 está unido a una de las gargantas de unión 38. El detector de posición 37 detecta el imán permanente M, que se mueve junto con el vástago de salida 29 detectando, por tanto, la posición del vástago de salida 29. El detector de posición 37 puede ser un dispositivo detector de posición (interruptor detector de posición) que se utiliza para detectar la posición del pistón de un cilindro de presión de fluido tal como un cilindro neumático o un cilindro hidráulico y tiene un perceptor magnético. Como se muestra en la fig. 1A, hay orificios roscados 12c, para fijar el órgano eléctrico de accionamiento 11 a una máquina automatizada, formados en el alojamiento 12 del cilindro. Una parte 39 de control del motor está unida al extremo trasero del motor 19. La parte 39 de control del motor incluye una placa de control 40 y un codificador giratorio 41. El codificador giratorio 41 funciona como detector de rotación que detecta la rotación del eje giratorio 20 del motor 19. Asimismo, en el motor 19 está previsto un perceptor 19a de temperatura (representado en la fig. 2). Como se muestra en la fig. 2, la placa de control 40 monta un circuito 42 de activación del motor, un circuito 43 de control del motor y una memoria 44. El circuito 43 de control del motor incluye un microprocesador MP que controla el circuito 42 de activación del motor. La memoria 44 almacena programas de control. El microprocesador MP controla el motor 19 a través del circuito 42 de activación del motor basándose en señales de mando procedentes de una unidad principal de mando 45 tal como un PC o un PLC y en señales de detección del codificador giratorio 41. La unidad principal de mando 45 detecta si el vástago de salida 29 se encuentra en posición de reposo (posición de referencia) basándose en una señal de detección del detector de posición único 37 unido al órgano eléctrico de accionamiento 11, y calcula el desplazamiento del vástago de salida 29 desde la posición de referencia basándose en una señal de salida del codificador giratorio 41. La unidad principal de mando 45 emite entonces como salida una señal de mando para el microprocesador MP. En la presente realización, la unidad principal de mando 45, el órgano eléctrico de accionamiento 11 y el detector de posición 37 forman un sistema de control del órgano eléctrico de accionamiento. Específicamente, la unidad principal de mando 45 detecta si el vástago de salida 29 está en la posición de reposo basándose en una señal de detección del detector de posición 37, y calcula el desplazamiento del vástago de salida 29 desde la posición de reposo basándose en una señal de salida del codificador giratorio 41. Entonces, basándose en la posición del vástago de salida 29, la unidad principal de mando 45 emite como salida, para el microprocesador MP, una señal de mando similar a la utilizada durante el control de un cilindro neumático. La unidad principal de mando 45 recibe, también, una salida del perceptor de temperatura 19a para impedir que el motor 19 se caliente excesivamente. Cuando la temperatura detectada es mayor o igual que una temperatura predeterminada, la unidad principal de mando 45 determina que la temperatura es anormalmente elevada y emite como salida una orden de parada de emergencia al microprocesador MP. El programa de control incluye, como modos de control para controlar el motor 19, un modo de cilindro de presión de fluido (en la presente realización, un modo de cilindro neumático) y un modo de motor eléctrico. El modo de cilindro de presión de fluido se refiere a un modo de control para hacer, basándose en órdenes procedentes de la unidad principal de mando 45, que el órgano eléctrico de accionamiento 11 lleve a cabo acciones que corresponden a las acciones de un cilindro de presión de fluido que es controlado mediante una válvula electromagnética. El modo de cilindro de presión de fluido incluye un modo de transporte para mover un objeto a una posición predeterminada y un modo de presión para presionar un objeto con una fuerza predeterminada. Tanto en el modo de transporte como en el modo de presión, el modo de cilindro de presión de fluido se divide en tres modos que corresponden,... [Seguir leyendo]
Reivindicaciones:
1. Un órgano eléctrico de accionamiento (11) que tiene un cuerpo principal (12) y que puede utilizarse en lugar de un cilindro de presión de fluido que forma parte de una máquina automatizada y tiene un vástago de pistón, cuyo movimiento de vaivén es controlado mediante una válvula electromagnética, cuyo órgano eléctrico de accionamiento (11) comprende: un cuerpo movible (29) que puede ser desplazado linealmente, correspondiendo el cuerpo movible (29) al vástago de pistón del cilindro de presión de fluido; un motor (19) que tiene un eje giratorio (20); un mecanismo (21, 28) de conversión del movimiento que convierte la rotación del eje giratorio (20) del motor
(19) en el movimiento lineal del cuerpo movible (29); un circuito (43) de control del motor, que controla el motor (19); y una memoria (44) que almacena un programa de control para controlar el circuito (43) de control del motor, caracterizándose el órgano eléctrico de accionamiento (11) porque el programa de control tiene, como modo de control para controlar el motor (19), un modo de cilindro de presión de fluido, en el que el órgano eléctrico de accionamiento (11) acciona el cuerpo movible (29) de forma correspondiente a la manera en que es accionado el vástago de pistón cuando el cilindro de presión de fluido es controlado mediante la válvula electromagnética, y en el que el circuito (43) de control del motor controla la activación y la parada del cuerpo movible (29) en el modo de cilindro de presión de fluido, en el que el modo de cilindro de presión de fluido del programa de control se divide en tres modos, cada uno de ellos correspondiente a uno de un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide único de dos posiciones, un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de dos posiciones, y un caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de tres posiciones, y en el que el circuito (43) de control del motor controla el motor (19) en uno seleccionado de los tres modos.
2. El órgano eléctrico de accionamiento (11) de acuerdo con la reivindicación 1, caracterizado porque el cuerpo movible (29) tiene una parte de detección (M) que se mueve de forma enteriza con el cuerpo movible (29), y en el que cuerpo principal (12) del órgano eléctrico de accionamiento (11) tiene una parte de unión (38) a la que se une un detector de posición (37) para detectar la parte de detección (M).
3. El órgano eléctrico de accionamiento (11) de acuerdo con la reivindicación 1 o la reivindicación 2, caracterizado porque el modo de cilindro de presión de fluido del programa de control se divide en un total de seis modos diferentes que incluyen un modo de transporte para mover un objeto y un modo de presión para aplicar una fuerza de presión a un objeto con el fin de retenerlo, dividiéndose cada uno del modo de transporte y del modo de presión en dichos tres modos correspondientes al caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide único de dos posiciones, el caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de dos posiciones, y el caso en que un cilindro de presión de fluido es controlado con una válvula de solenoide doble de tres posiciones, y en el que el circuito (43) de control del motor controla el motor (19) en uno seleccionado de los seis modos.
4. El órgano eléctrico de accionamiento (11) de acuerdo con la reivindicación 3, caracterizado porque cuando se controla el motor (19) en el modo de transporte, el circuito (43) de control del motor es capaz de cambiar la velocidad de movimiento, la aceleración, y una distancia de desplazamiento objetivo del cuerpo movible (29), y en el que cuando se controla el motor (19) en el modo de presión, el circuito (43) de control del motor es capaz de cambiar el par, la posición en la que se inicia una reducción del par, y una distancia de desplazamiento objetivo.
5. El órgano eléctrico de accionamiento (11) de acuerdo con una cualquiera de las reivindicaciones 1 a 4, caracterizado por un detector de rotación (41) que detecta la rotación del eje giratorio (20) del motor (19), en el que el programa de control tiene, además, un modo de motor eléctrico, en el que el motor (19) es controlado basándose en una señal de mando procedente de una unidad principal de mando (45) y en una señal de detección del detector de rotación (41), y en el que el circuito (43) de control del motor controla el motor (19) en uno seleccionado del modo de cilindro de presión de fluido y el modo de motor eléctrico.
6. El órgano eléctrico de accionamiento (11) de acuerdo con una cualquiera de las reivindicaciones 1 a 5, caracterizado porque el programa de control se configura para controlar el motor (19) de tal manera que, cuando se esté controlando el motor (19) en el modo de cilindro de presión de fluido, el motor (19) sea detenido y devuelva el cuerpo movible (29) a una posición de reposo basándose en una orden de parada de emergencia y en una orden de retorno a la posición de reposo procedentes de una unidad principal de mando (45).
7. El órgano eléctrico de accionamiento (11) de acuerdo con una cualquiera de las reivindicaciones 1 a 6, caracterizado porque el cuerpo movible (29) está instalado en una válvula de control que, selectivamente, interrumpe y permite el flujo de fluido, en el que el circuito (43) de control del motor es capaz de cambiar la velocidad de apertura y de cierre de la válvula de control.
8. El órgano eléctrico de accionamiento (11) de acuerdo con una cualquiera de las reivindicaciones 1 a 6, caracterizado porque el cuerpo movible (29) está instalado en una válvula de control que controla el caudal o la presión del fluido.
Patentes similares o relacionadas:
Máquina de fresado de pórtico, del 21 de Noviembre de 2019, de INNSE-BERARDI S.P.A. SOCIETA' UNIPERSONALE: 1. Máquina de fresado de pórtico , provista de: - un par de montantes separados entre sí en una dirección transversal (Y), en la que cada montante se […]
Procedimiento de mecanizado, del 21 de Marzo de 2018, de Mitis: Procedimiento de mecanizado para realizar al menos un mecanizado de forma, que comprende: a) la realización de un mecanizado, particularmente axial, […]
Dispositivo de automatización industrial, del 5 de Julio de 2017, de Telerobot S.p.A: Dispositivo de automatización industrial que comprende una pluralidad de grupos de manipulación aptos para manipular un objeto, en una dirección de manipulación […]
 Dispositivo de procesamiento de materiales, en particular una máquina de transformación, del 30 de Noviembre de 2015, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de procesamiento de materiales, en particular máquina de transformación, que presenta al menos un equipo de procesamiento de materiales , que está […]
Dispositivo de procesamiento de materiales, en particular una máquina de transformación, del 30 de Noviembre de 2015, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de procesamiento de materiales, en particular máquina de transformación, que presenta al menos un equipo de procesamiento de materiales , que está […]
 MECANISMO PORTA-HERRAMIENTA, del 25 de Junio de 2015, de ADVANCED ENGINEERING & INNOVATION: Mecanismo porta-herramienta, para la sujeción y accionamiento de una herramienta de mecanizado, que tiene un eje principal de accionamiento, al que se conectan de […]
MECANISMO PORTA-HERRAMIENTA, del 25 de Junio de 2015, de ADVANCED ENGINEERING & INNOVATION: Mecanismo porta-herramienta, para la sujeción y accionamiento de una herramienta de mecanizado, que tiene un eje principal de accionamiento, al que se conectan de […]
Sistema de husillo que comprende cojinete de deslizamiento y cojinete de deslizamiento, del 25 de Marzo de 2015, de NTN-SNR Roulements: Un sistema de husillo que comprende - una pista estacionaria , - un husillo montado para rotación en relación con la pista estacionaria sobre un eje […]
Dispositivo de manipulación de herramientas para máquinas herramientas, del 31 de Diciembre de 2014, de DECKEL MAHO PFRONTEN GMBH: Dispositivo de manipulación de herramientas para máquinas herramientas con - un almacén de herramientas , que presenta una posición de […]
Máquina herramienta con posicionamiento selectivo del motor impulsor, del 7 de Mayo de 2014, de Fives Machining Systems, Inc: Una máquina herramienta que tiene unos ejes X, Y y Z y un huso móvil situado en una zona de trabajo para mecanizar una pieza de trabajo montada en una […]