Dispositivo motriz electro-mecánico para usar con instrumentos de anastomosis, grapado y resección.
Un controlador electromagnético combinado y un conjunto de accesorios quirúrgicos (100,
180, 200), que comprende:
- un controlador electromagnético (100) que incluye:
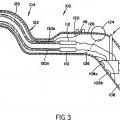
un eje (122) flexible que incluye al menos dos miembros rotativos axiales (136a, 136b) flexibles, dichos miembros rotativos tienen unos extremos distales y proximales,
cada miembro rotativo es capaz de transmitir un par motor aplicado al extremo proximal del mismo, a lo largo del mencionado extremo distal del mismo.
los mencionados extremos distales incluyen unos medios (138a, 138b) para el acoplamiento y transferencia del par motor a los mencionados accesorios de fijación lineal y grapado correspondientes;
- al menos un cable de guía dispuesto a lo largo del eje y configurado para guiar el eje flexible;
- una porción del asa (102), y
- un accesorio quirúrgico (180, 200),
caracterizado por que la porción del asa incluye
al menos dos motores acoplables selectivamente (110, 112) dispuestos en la misma, acoplados a los correspondientes de los mencionados miembros rotativos del mencionado eje flexible, por lo que el acople selectivo de cualesquiera de los al menos dos motores provoca que gire el correspondiente eje rotativo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10010188.
Solicitante: Covidien LP .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15 HAMPSHIRE STREET MANSFIELD, MA 02048 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WHITMAN, MICHAEL, P..
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/08 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Clamps para heridas.
PDF original: ES-2545233_T3.pdf

Fragmento de la descripción:
Dispositivo motriz electro-mecánico para usar con instrumentos de anastomosis, grapado y resección Antecedentes de la invención Campo de la invención La presente invención está relacionada en general con un dispositivo electromecánico para su uso con la anastomosis, grapado y herramientas quirúrgicas de resección, y más específicamente con un dispositivo electromecánico mediante el cual las herramientas de anastomosis, grapado y reseccion puedan accionarse de forma remota.
Descripción de la técnica anterior Con la identificación de tejido canceroso o bien otro tejido anómalo en el tracto gastrointestinal, se prescribe con frecuencia la intervención quirúrgica. El campo de la cirugía de cáncer, y más específicamente el procedimiento quirúrgico mediante el cual una sección del tracto gastrointestinal que incluye un tejido canceroso o anómalo es reseccionada, incluye varios instrumentos diseñados en forma exclusiva. En combinación con una descripción de la presente instrumentación y de sus funciones, se proporcionará también una descripción del estado de la técnica en este procedimiento quirúrgico.
La primera cuestión que tiene que ser contestada al determinar como tratar el cáncer gastrointestinal está relacionada con la situación especifica del tejido canceroso. Esto es muy importante en tanto que los instrumentos que están provistos en la técnica presente tienen limitaciones en relación de cómo pueden ser insertados dentro del tracto gastrointestinal. Si el tejido canceroso está demasiado lejos del colon, por ejemplo, entonces la instrumentación estándar provista no es utilizable, requiriendo por tanto unas acomodaciones especiales. Estas acomodaciones generalmente incrementan el riesgo de contaminación de los tejidos circundantes con contenidos del intestino, con el incremento de la longitud de la cirugía y de la necesidad correspondiente de anestesia, y eliminando las ventajas de la anastomosis precisa y del grapado que procede de la utilización de un dispositivo mecanizado.
Más específicamente, en el caso de que el tejido canceroso esté localizado en una posición en el colon que sea accesible por la instrumentación presente, el abdomen del paciente se abre inicialmente para la exposición del intestino. El cirujano utiliza entonces una cuchilla lineal y un dispositivo de grapado que corta el tubo del colon en ambos lados del tejido canceroso, creando por tanto los extremos de las grapas en el intestino (un extremo distal el cual está dirigido hacia el ano, y el extremo proximal que está cerrado hacia el intestino pequeño) . Esto se realiza con el fin de minimizar temporalmente la contaminación.
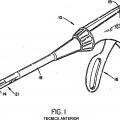
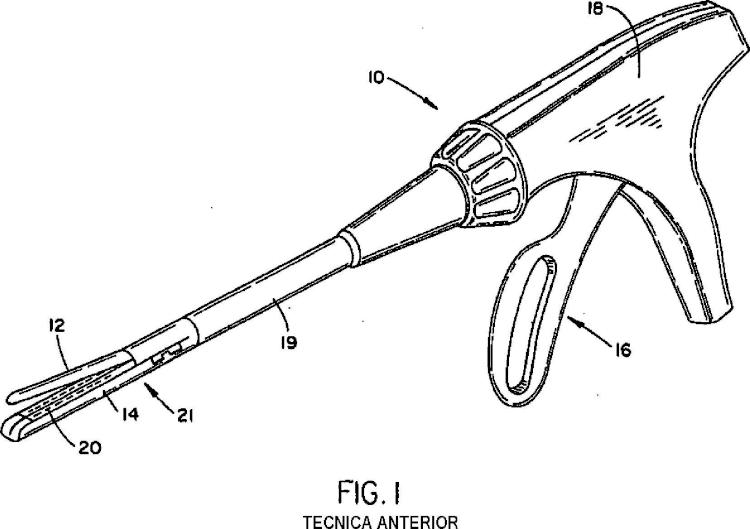
Más en particular, con referencia a la figura 1, el intestino está situado entre los elementos 12, 14 de operación con tijeras en la punta del instrumento 10 de grapado lineal. Mediante la compresión del gatillo disparador 16 en el asa 18 del dispositivo, el cirujano hace que los elementos de las tijeras 12, 14 lleguen conjuntamente. Un segundo gatillo de disparo (o bien una segunda acción del mismo gatillo de disparo) es accionado entonces para accionar una serie de grapas 20 a través del extremo grapado del colon, cerrando y transfiriendo por tanto los extremos.
El cirujano entonces abre el extremo proximal e inserta la porción del yunque de un instrumento de anastomosis y grapado dentro del extremo proximal expuesto. Esta etapa, así como también el resto del procedimiento quirúrgico, esta relacionada con el funcionamiento de este instrumento quirúrgico. Más en particular, y con respecto a la figura 2, el cirujano comienza a agarrar el instrumento 30 y a girar manualmente el dial 32 en la base del asa 34, que provoca que la cabeza del yunque 36 en el extremo opuesto avance hacia delante. El cirujano continúa girando el dial 32 hasta que la cabeza del yunque 36 avance hacia su posición extendida de la parte más extrema. Este giro manual requiere cerca de treinta rotaciones completas. Una vez extendido, el cabezal del yunque del instrumento se desacopla y se inserta dentro de la abertura parcial del extremo proximal de forma tal que el poste de acoplamiento se extienda hacia fuera totalmente. Esta abertura parcial del extremo proximal se cierra entonces de forma suturada. El eje de extensión 38 del instrumento 30 de anastomosis y grapado es entonces insertado en el colon inferior, en forma trans-anal, hasta que el vástago de acoplo 40 se extienda a través del extremo distal grapado. El cirujano une entonces los extremos de acoplamiento del yunque y comienza manualmente a girar el dial en el asa de nuevo, esta vez llevando el cabezal del yunque más cerca del extremo 42 del eje.
Una vez que el cabezal del yunque y el eje se llevan cerca conjuntamente, después de que cirujano haya girado manualmente el dial otras treinta veces, el gatillo 44 de disparo de tipo de agarre en el asa se acciona manualmente. Esta actuación provoca que una cuchilla circular 46 avance axialmente desde la punta del eje, y en contacto con la cara opuesta 48 del yunque 36. La cuchilla corta los extremos cerrados grapados de los extremos proximal y distal del colon, cortando también por tanto un nuevo par de extremos de las porciones proximal y distal del colon. El tejido que haya sido cortado se retiene en el volumen interior en el extremo del eje.
En el paso de bloqueo con el corte, los extremos recientes abiertos se unen conjuntamente por medio de las grapas 50 las cuales avanzan a través de agujeros en el perímetro de la punta de eje (presionándose contra y cerrándose por la cara opuesta del yunque) . El eje acoplado y el yunque son entonces retirados del paciente.
Más en particular, con respecto a las funciones estructurales del instrumento 10 de grapado lineal de la técnica anterior que está provista en la figura 1, el dispositivo comprende una estructura 18 de estilo de pistola de agarre que tiene un eje alargado 19 y una porción distal 20. La porción distal incluye un par de elementos 12, 14 de agarre de estilo de tijera, que amordaza los extremos abiertos del colon cerrado. De hecho, solo uno de los dos elementos de agarre de estilo de tijeras, la porción 12 de la mordaza superior, mueve (pivota) con respecto a la estructura global; el otro permanece fijo. La actuación de estos medios de tijeras (el pivote de la mordaza superior 12 está controlada por los medios de un gatillo de disparo 16 mantenido en el asa. Se han expuesto varios medios para retener las puntas de los brazos cerrados de las tijeras, incluyendo la fijación a presión, presillas, collares, etc., y otros sistemas.
Además de los medios de tijeras, la porción distal incluye también un mecanismo de grapado. La mordaza 14 inferior no movible del mecanismo de las tijeras incluye una zona de recepción del cartucho de grapas y un mecanismo de accionamiento de las grapas 20 a través del extremo grapado del colon, contra la porción de la mordaza superior, sellando por tanto el extremo abierto previamente. Los elementos de las tijeras pueden estar formados integralmente con el eje, o bien pueden ser desmontables, de forma tal que varios elementos de grapado puedan ser intercambiables.
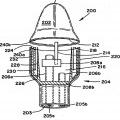
Más en particular con respecto a las funciones estructurales de la anastomosis y del instrumento de grapado de la técnica anterior están provistas en la figura 2, en donde el dispositivo comprende una porción de yunque 36, una grapa, cuchilla y una porción de reservorio 42, una porción de eje 38, y una porción de asa 34. La porción de yunque 36, la cual es desmontable selectivamente de la punta del eje, es de forma de una bala, que tiene una porción superior de punta roma, una superficie 48 de soporte de corte plano en el fondo, y un poste de acoplo 41 que se extiende axialmente desde la superficie del fondo.
La grapa, cuchilla, y porción de reservorio 42 (porción SBR) del instrumento están provistos en el extremo distal del instrumento, e incluye un vástago 40 de acoplo selectivamente saliente y retractil, para recibir selectivamente la porción del yunque. Esta acción del vástago de acoplamiento está provista por un tornillo roscado y un mecanismo de torno sin fin montado en el asa 34 (descrito más en su totalidad más adelante) . La porción SBR es de forma cilíndrica, formando un armazón que tiene un interior hueco. Es este interior hueco el que forma el reservorio 47. La cuchilla 46 es igualmente cilíndrica, y se asienta en el interior del armazón, contra la pared interna. La cuchilla avanza selectivamente hacia fuera desde el armazón, de acuerdo con la actuación de un mecanismo 44 de gatillo de disparo del asa (de nuevo se describe más adelante en su totalidad) . En la superficie que mira hacia fuera axialmente de la pared cilíndrica del armazón se encuentra una serie de puertos de grapas,... [Seguir leyendo]
Reivindicaciones:
1. Un controlador electromagnético combinado y un conjunto de accesorios quirúrgicos (100, 180, 200) , que comprende:
- un controlador electromagnético (100) que incluye:
un eje (122) flexible que incluye al menos dos miembros rotativos axiales (136a, 136b) flexibles, dichos miembros rotativos tienen unos extremos distales y proximales, cada miembro rotativo es capaz de transmitir un par motor aplicado al extremo proximal del mismo, a lo largo del mencionado extremo distal del mismo.
los mencionados extremos distales incluyen unos medios (138a, 138b) para el acoplamiento y transferencia del par motor a los mencionados accesorios de fijación lineal y grapado correspondientes;
- al menos un cable de guía dispuesto a lo largo del eje y configurado para guiar el eje flexible;
- una porción del asa (102) , y -un accesorio quirúrgico (180, 200) , caracterizado por que la porción del asa incluye al menos dos motores acoplables selectivamente (110, 112) dispuestos en la misma, acoplados a los correspondientes de los mencionados miembros rotativos del mencionado eje flexible, por lo que el acople selectivo de cualesquiera de los al menos dos motores provoca que gire el correspondiente eje rotativo.
2. El conjunto de controlador electromecánico expuesto en la reivindicación 1, en el que el asa incluye una fuente de alimentación (114) acoplada a dichos al menos dos motores para accionarlos independientemente.
3. El conjunto de controlador electromecánico expuesto en la reivindicación 2, en el que la fuente de alimentación es una fuente de corriente continua.
4. El conjunto de controlador electromecánico expuesto en la reivindicación 1, en donde la mencionada fuente de alimentación es reversible, de forma que los motores puedan polarizarse en forma inversa, accionando los motores por tanto en la dirección rotacional opuesta.
5. El conjunto de controlador electromecánico expuesto en la reivindicación 4, que incluye un conmutador accionable manualmente (116) el cual está acoplado a la mencionada fuente de alimentación, para invertir de manera selectiva la fuente de alimentación.
6. El conjunto de controlador electromecánico expuesto en cualquiera de las reivindicaciones 1 a 5, que incluye un circuito eléctrico (120) accionable y unos medios indicadores (118) acoplados, donde el circuito eléctrico accionable es acoplable a los correspondientes sensores de dicho accesorio, por lo que los mencionados medios indicadores pueden indicar las posiciones de dicho accesorio como respuesta al estado del circuito eléctrico.
7. El conjunto de controlador electromecánico expuesto en la reivindicación 6, en donde los medios indicadores comprenden una LCD.
8. El conjunto de controlador electromecánico expuesto en cualquiera de las reivindicaciones 1 a 7, en donde los extremos distales de los miembros flexibles y los miembros rotativos axiales son de forma hexagonal, y en donde los miembros de giro de los accesorios quirúrgicos incluyen cada uno unos receptáculos hexagonales correspondientes, de forma que los miembros rotatorios puedan acoplar y transmitir un par motor a los correspondientes miembros de giro de los accesorios quirúrgicos por un encaje de interferencia con los mencionados miembros de giro.
9. El conjunto de controlador electromecánico expuesto en cualquiera de las reivindicaciones 1 a 8, en donde el accesorio quirúrgico es un accesorio de anastomosis y grapado que incluye:
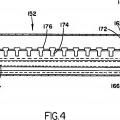
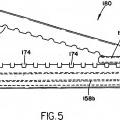
una porción de interfaz que tiene al menos dos miembros de giro, siendo cada uno de dichos miembros de giro acoplable a uno de dichos al menos dos miembros rotativos axiales flexibles, una porción de yunque (176, 202) que selectivamente puede avanzar o retraerse según la rotación de uno de los al menos dos miembros de giro, una porción de armazón de cuchilla y grapa, acoplable selectivamente a la mencionada porción del yunque, cuya porción del armazón incluye además un conjunto de cuchilla y de controlador de grapas, que está acoplado a un segundo miembro de al menos dos miembros de giro tal que la actuación selectiva del mencionado segundo miembro de giro provoca que la mencionada cuchilla y el mencionado controlador de grapas avance fuera del alojamiento y hacia la porción del yunque.
10. El conjunto de controlador electromecánico expuesto en cualquiera de las reivindicaciones 1 a 8, en donde el accesorio quirúrgico es un accesorio de amordazado lineal y de grapado que incluye:
una porción de interfaz que tiene al menos dos miembros de giro, siendo cada uno de dichos miembros de giro acoplable a uno de dichos al menos dos miembros rotativos axiales flexibles, un par de mordazas opuestas las cuales son selectivamente separables y cerrables de acuerdo con la rotación de uno de al menos dos miembros de giro, una pluralidad de grapas y un mecanismo del controlador de grapas, estando dicho mecanismo del controlador de grapas acoplado selectivamente en la relación de control de las grapas a un segundo miembro de al menos dos miembros de giro.
Patentes similares o relacionadas:
Dispositivos para el tratamiento de la pared abdominal, del 24 de Junio de 2020, de LIFECELL CORPORATION: Un dispositivo de tratamiento abdominal o de fascia, que comprende: una lámina de matriz de tejido acelular , caracterizado porque la lámina […]
Matrices de tejidos y métodos de tratamiento, del 19 de Febrero de 2020, de LIFECELL CORPORATION: Un producto para el tratamiento de tejidos, que comprende: un cuerpo que tiene una longitud y un ancho alargados, e incluye una línea central que se extiende por la […]
GELES DE QUITOSANO(A) CONTENIENDO NANOPARTICULAS METALICAS DE COBRE, PLATA Y ANTIBIOTICOS (CIPROFLOXACINO, CEFOTAXIME, GENTAMICINA Y CLOXACILINA), del 12 de Diciembre de 2019, de CARDENAS Y CIA LTDA: En la presente invención se describen geles de quitosano (poli-beta-glucosamina) con propiedades bactericidas y fungicidas en mezcla con nanopartículas […]
Dispositivo para cerrar una abertura de tejidos, del 11 de Septiembre de 2019, de DermaClip International Limited: Un dispositivo de cierre para cerrar una abertura de tejido, que comprende: uno o más componentes de cierre, cada componente de cierre comprende un primer miembro […]
Fijaciones quirúrgicas recubiertas con materiales de tratamiento de heridas, del 4 de Septiembre de 2019, de Covidien LP (100.0%): Una fijación quirúrgica para usar en combinación con un aparato de aplicación de fijaciones quirúrgicas, comprendiendo la fijación quirúrgica : […]
Prótesis de malla autoadhesiva que se puede implantar con perfil de inserción reducido, del 3 de Julio de 2019, de C.R. BARD, INC.: Una prótesis de malla autoadhesiva asimétrica que se puede implantar para reparar tejido animal que comprende; una lámina de material de malla que […]
Procedimiento de fabricación para un dispositivo para la cura atraumática de heridas, del 20 de Mayo de 2019, de Schnepel, Thede: Procedimiento para fabricar un dispositivo para el cierre de heridas y para la cobertura de heridas con - un par de filas de eslabones de cierre […]
Aparato para el cerramiento de la herida con retención de posicionamiento de tejido secuencial, del 3 de Abril de 2019, de Incisive Surgical Inc: Un dispositivo de cerramiento de piel, que comprende: un cuerpo de dispositivo que tiene una porción de cabezal y un par de brazos (192a, 192b) […]