MOTORES DE VIBRACIONES.
Motor de vibraciones que comprende por lo menos una pieza fija (4,
104) y una pieza arrastrada (1a, 1b, 101) en movimiento con respecto a dicha pieza fija, así como unos medios de excitación apropiados para ejercer unos esfuerzos que tienden a desplazar unos sectores de contacto rígidos (7, 8, 107, 108) que presenta dicha pieza fija y/o dicha pieza en movimiento y en hacer vibrar estos sectores rígidos según unos modos vibratorios que combinan unas vibraciones tangenciales y unas vibraciones normales que provocan el desplazamiento de la pieza en movimiento, presentando dicho motor, para las vibraciones tangenciales o las vibraciones normales, un modo de resonancia principal y por lo menos un modo de resonancia secundaria, caracterizado porque dicha pieza fija y/o dicha pieza arrastrada en movimiento comprende(n) unas diferentes partes (10, 120, 121, 122, 109) y porque el material, la geometría y las masas de dichas partes se eligen de manera que el modo de resonancia secundaria esté a una frecuencia sustancialmente igual a una frecuencia armónica del modo de resonancia principal
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E01400606.
Solicitante: SAGEM SA.
Nacionalidad solicitante: Francia.
Dirección: 6, AVENUE D'IENA,75116 PARIS.
Inventor/es: AUDREN, JEAN-THIERRY, BEZANERE, DANIEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Marzo de 2001.
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación Internacional de Patentes:
- H01L41/09C
- H01L41/09D
Clasificación PCT:
- H02N2/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02N MAQUINAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › Máquinas eléctricas en general que utilizan el efecto piezoeléctrico, la electroestricción o la magnetoestricción (producción de vibraciones mecánicas en general B06B; elementos piezoeléctricos electroestrictivos o magnetoestrictivos en general H01L 41/00).
Clasificación antigua:
- H02N2/00 H02N […] › Máquinas eléctricas en general que utilizan el efecto piezoeléctrico, la electroestricción o la magnetoestricción (producción de vibraciones mecánicas en general B06B; elementos piezoeléctricos electroestrictivos o magnetoestrictivos en general H01L 41/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Motores de vibraciones.
Campo general de la invención
La presente invención se refiere a los motores de vibraciones.
Los motores de vibraciones son conocidos asimismo con el nombre de motores de ultrasonidos para hacer referencia a su frecuencia preferida de utilización o de motores piezoactivos para hacer referencia a su material de excitación preferido.
La invención encuentra aplicación de forma particularmente ventajosa en el caso de motores de vibraciones rotativos, pero puede ser aplicada asimismo para los accionadores lineales, designando el término motor de vibraciones en la presente memoria a la vez los motores rotativos y los motores lineales.
Recordatorio sobre un ejemplo de estructura posible para un motor de vibraciones
Clásicamente, un motor rotativo de vibraciones comprende por lo menos un estator y un rotor, así como unos medios de excitación para deformar dicho estator y/o dicho rotor según unos modos vibratorios que combinan unas vibraciones tangenciales y unas vibraciones normales apropiadas para arrastrar el rotor según un movimiento de rotación continuo.
Unas estructuras de motores de vibraciones particularmente ventajosas han sido propuestas en particular en las solicitudes de patente EP 907 213 y FR 98 10391, a las cuales se podrá ventajosamente hacer referencia. El principio general de estas estructuras está ilustrado esquemáticamente en las figuras 1 y 2.
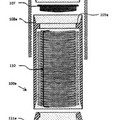
Un motor de este tipo comprende una carcasa 2, dos discos de rotor 1 solidarios de un árbol 3 y unos platos estatóricos 4 entre los cuales dichos discos 1 están dispuestos.
Cada plato estatórico 4 está constituido por una pluralidad de sectores de contacto 6 (denominados pétalos de estator) que están repartidos anularmente y que están separados de dos en dos por unos elementos activos de deformación tangencial 7 (elementos piezoeléctricos u otros). Los sectores de contacto 6 de los dos platos 4 interiores están en la vertical unos de los otros. Unos elementos activos 8 (elementos piezoeléctricos u otros) para la generación de una fuerza normal están interpuestos entre los sectores 6 de estos dos platos interiores 4. Unos medios 9 que forman un resorte están interpuestos entre la carcasa 2 y los sectores de contacto 6 de los platos 4 exteriores.
Cuando un elemento activo 8 se alarga, los sectores de contacto 6 en la vertical de los cuales está dispuesto pasan a pinzar los discos de rotor 1. Cuando se contrae, los sectores de contacto 6 que le corresponden sueltan los discos 1.
Dos elementos activos 7 a ambos lados de un mismo sector 6 son excitados en oposición de fase. Asimismo, dos elementos activos 8 próximos son también excitados en oposición de fase. Los elementos activos 8 para la generación de un esfuerzo normal y los elementos activos 7 de deformación tangencial son mandados de forma síncrona para arrastrar los rotores 1 en rotación.
Estado de la técnica y presentación de la invención
Uno de los problemas encontrados con los motores de vibraciones es el de su rendimiento.
Se ha propuesto ya utilizar a nivel de una zona de contacto recíproca entre un rotor y un estator un material que tenga unas propiedades elásticas, de manera que minimice las disipaciones energéticas relacionadas con los rozamientos cíclicos entre el rotor y el estator.
En particular, se ha propuesto en la solicitud de patente FR 2.742.011 utilizar unas aleaciones con memoria de forma, que son unos materiales que presentan una superelasticidad no lineal y que, con respecto a los materiales clásicos, tienen la ventaja de permitir grandes deformaciones para unas cantidades más pequeñas de material.
Por superelasticidad, se entiende en la presente memoria la propiedad de un material para aceptar unas elongaciones reversibles de 1% o superiores. Se recuerda además que el carácter no lineal de una superelasticidad se traduce por la presencia de un plato de cambio de fase sobre la curva que da la deformación en función de la fuerza de tracción.
Se ha demostrado en la solicitud de patente FR 2.742.011 citada que dicha estructura tenía la ventaja de limitar la fuerza normal de apoyo y mantener la fuerza tangencial de rozamiento en unos valores inferiores al umbral de deslizamiento.
Un objetivo de la invención es aumentar más el rendimiento de los motores de vibraciones.
Se conoce a partir de la solicitud EP 0 543 114 un accionador en el que los contactos de apoyo entre la parte fija y la parte móvil están limitados al máximo, de manera que las pérdidas energéticas por rozamiento están minimizadas. En la solución propuesta en este documento, la superficie de contacto de la pieza fija que constituye el estator no es rígida, sino que es deformada por la propagación de una onda progresiva que arrastra la pieza móvil que constituye el rotor. Solamente el vértice de la deformación continua está entonces en contacto con la pieza arrastrada.
Se comprende que esta solución no permite las potencias de arrastre importantes, que permiten las estructuras de motores de vibraciones que, como ha sido descrito con referencia a las figuras 1 y 2, funcionan sobre el principio de la puesta en vibración de sectores rígidos desplazados en bloque y no por deformación continua.
La invención propone a su vez una solución que permite aumentar el rendimiento de motores de vibraciones del tipo que comprende por lo menos una pieza fija y una pieza arrastrada en movimiento con respecto a dicha pieza fija, así como unos medios de excitación apropiados para ejercer unos esfuerzos que tienden a desplazar unos sectores de contacto rígidos que presenta dicha pieza fija y/o dicha pieza en movimiento y hacer vibrar estos sectores rígidos según unos modos vibratorios que combinan unas vibraciones tangenciales y unas vibraciones normales que provocan el desplazamiento de la pieza en movimiento.
Presentando dicho motor, para las vibraciones tangenciales o las vibraciones normales, un modo de resonancia principal y por lo menos un modo de resonancia secundaria, la solución propuesta consiste en que dicha pieza fija y/o dicha pieza arrastrada en movimiento comprende(n) unas diferentes partes (10, 120, 121, 122, 109) y en que el material, la geometría y las masas de dichas partes se eligen de manera que el modo de resonancia secundaria está a una frecuencia sustancialmente igual a una frecuencia armónica del modo de resonancia principal.
En particular, la pieza en movimiento puede ser un rotor de disco rígido, comprendiendo dicho motor un estator que comprende por lo menos un par de platos estatóricos, comprendiendo cada plato unos pétalos rígidos apropiados para recibir unos medios para desplazar dichos pétalos rígidos tangencialmente y normalmente.
Como variante, el motor puede ser un accionador lineal.
Según una primera variante ventajosa, por lo menos un elemento que tiene unas propiedades de deformaciones elásticas está incluido en la pieza en movimiento y/o la pieza fija, estando dicho elemento separado de la cara de contacto de dicha pieza en movimiento y/o de dicha pieza fija por una parte que forma un patín,
y la (o las) pieza(s) en la cual (las cuales) el o los elementos con deformaciones elásticas están incluidos está(n) dimensionada(s) de tal manera que la frecuencia del modo de resonancia tangencial secundaria -que es el modo de resonancia en el que la parte que forma el patín y el resto de la pieza oscilan en la oposición de fase- es sustancialmente igual a una frecuencia que es una frecuencia armónica del modo de resonancia tangencial principal -en la que la parte que forma el patín y el resto de la pieza oscilan en fase.
Un motor de este tipo está ventajosamente completado por las diferentes características siguientes:
- la frecuencia del modo de resonancia tangencial secundaria es sustancialmente igual a dos veces la frecuencia del modo de resonancia tangencial principal;
- comprende un campo de elementos elásticos interpuesto entre la parte que forma el patín y el resto de la pieza fija y/o de la pieza en movimiento;
- un elemento elástico es de un material que presenta unas propiedades de superelasticidad.
Según otra variante también ventajosa, que puede ser realizada como complemento de la primera o independientemente, el motor presenta una frecuencia de resonancia normal secundaria que es sustancialmente una frecuencia armónica de la frecuencia de resonancia normal principal y los medios de excitación...
Reivindicaciones:
1. Motor de vibraciones que comprende por lo menos una pieza fija (4, 104) y una pieza arrastrada (1a, 1b, 101) en movimiento con respecto a dicha pieza fija, así como unos medios de excitación apropiados para ejercer unos esfuerzos que tienden a desplazar unos sectores de contacto rígidos (7, 8, 107, 108) que presenta dicha pieza fija y/o dicha pieza en movimiento y en hacer vibrar estos sectores rígidos según unos modos vibratorios que combinan unas vibraciones tangenciales y unas vibraciones normales que provocan el desplazamiento de la pieza en movimiento, presentando dicho motor, para las vibraciones tangenciales o las vibraciones normales, un modo de resonancia principal y por lo menos un modo de resonancia secundaria, caracterizado porque dicha pieza fija y/o dicha pieza arrastrada en movimiento comprende(n) unas diferentes partes (10, 120, 121, 122, 109) y porque el material, la geometría y las masas de dichas partes se eligen de manera que el modo de resonancia secundaria esté a una frecuencia sustancialmente igual a una frecuencia armónica del modo de resonancia principal.
2. Motor según la reivindicación 1, caracterizado porque la pieza en movimiento es un rotor (1a, 1b, 101) de disco rígido, comprendiendo dicho motor un estator (4, 104) que comprende por lo menos un par de platos estatóricos (4, 104), comprendiendo cada plato unos pétalos (6, 106) rígidos apropiados para recibir unos medios para desplazar dichos pétalos rígidos tangencialmente y normalmente.
3. Motor según la reivindicación 1, caracterizado porque por lo menos un elemento (10, 122) que tiene unas propiedades de deformaciones elásticas está incluido en la pieza en movimiento y/o la pieza fija, estando dicho elemento separado de la cara de contacto de dicha pieza en movimiento y/o de dicha pieza fija por una parte (11) que forma un patín, y porque la (o las) pieza(s) (6) en la cual (las cuales) el o los elementos de deformaciones elásticas (10) están incluidos está(n) dimensionada(s) de tal manera que la frecuencia del modo de resonancia tangencial secundaria -que es el modo de resonancia en el que la parte que forma el patín (11) y el resto de la pieza oscilan en oposición de fase- es sustancialmente igual a una frecuencia que es una frecuencia armónica del modo de resonancia tangencial principal -en la que la parte que forma el patín y el resto de la pieza oscilan en fase.
4. Motor según la reivindicación 3, caracterizado porque la frecuencia del modo de resonancia tangencial secundaria es sustancialmente igual a dos veces la frecuencia del modo de resonancia tangencial principal.
5. Motor según una de las reivindicaciones 3 ó 4, caracterizado porque comprende un campo de elementos elásticos interpuesto entre la parte que forma el patín (11) y el resto de la pieza fija y/o de la pieza en movimiento.
6. Motor según una de las reivindicaciones 3 a 5, caracterizado porque un elemento elástico (10, 122) está realizado en un material que presenta unas propiedades de superelasticidad.
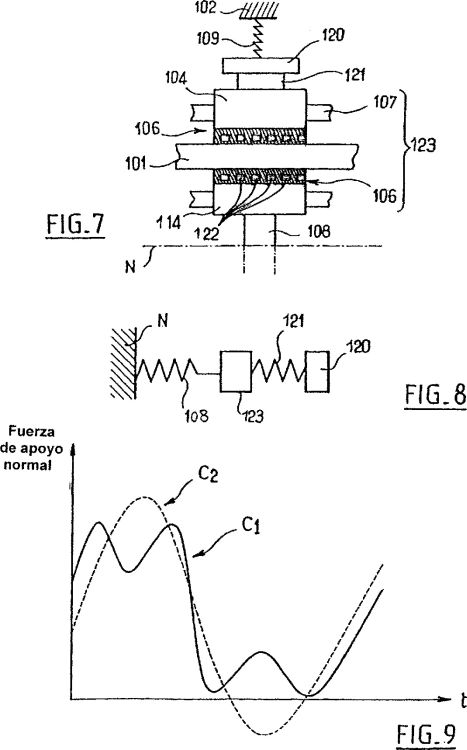
7. Motor según la reivindicación 1, caracterizado porque presenta una frecuencia de resonancia normal secundaria que es sustancialmente una frecuencia armónica de la frecuencia de resonancia normal principal y porque los medios de excitación comprenden unos medios para generar unas vibraciones normales a una y otra de estas dos frecuencias de resonancia.
8. Motor según las reivindicaciones 2 y 7, caracterizado porque comprende en una carcasa por lo menos dos pares de platos estatóricos (104) que comprenden unos elementos activos de deformación tangencial (107), así como dos discos de rotor (101) que se extienden entre los platos de uno y otro de los dos pares, extendiéndose unos elementos activos de deformación normal (122) en particular entre los platos de uno y otro de los dos pares que están enfrentados, estando unos medios que forman resortes (109) interpuestos entre los pares de platos y la carcasa, porque comprende, interpuesto entre los platos estatóricos (104) y los medios que forman resortes (109), por lo menos un conjunto que comprende una masa (120) y un elemento de deformación elástica (121), estando dicho conjunto dimensionado de tal manera que la frecuencia del modo de resonancia secundaria -en la que los platos estatóricos (104, 123) y dicha masa (120) oscilan en oposición de fase- sea sustancialmente igual a un número entero de veces la frecuencia de resonancia principal -en la que los platos estátoricos de dicha masa oscilan en fase-, comprendiendo los medios de excitación unos medios para excitar unos elementos activos de deformación normal a una frecuencia sustancialmente igual a la frecuencia de resonancia secundaria.
9. Motor según la reivindicación 8, caracterizado porque un elemento de deformación elástica es un elemento activo de deformación normal (108) excitado a una frecuencia sustancialmente igual a la frecuencia de resonancia secundaria.
10. Motor según la reivindicación 8, caracterizado porque un elemento activo de deformación normal para el modo de resonancia principal es excitado por una señal que es la suma de una señal a la frecuencia de resonancia principal y de una señal a la frecuencia de resonancia secundaria.
11. Motor según una de las reivindicaciones 7 a 10, caracterizado porque la frecuencia de resonancia secundaria es sustancialmente igual a un número impar de veces la frecuencia de resonancia principal.
12. Motor según la reivindicación 7, caracterizado porque la frecuencia de resonancia secundaria es sustancialmente igual a 3 ó 5 veces la frecuencia de resonancia principal.
13. Motor según una de las reivindicaciones 7 a 12, caracterizado porque la frecuencia del modo de resonancia secundaria es igual a un número entro de veces la frecuencia de resonancia principal, con una precisión del orden de
14. Motor según la reivindicación 8, caracterizado porque comprende, interpuesto entre los platos estatóricos (104) y los medios que forman resortes, por lo menos un conjunto que comprende una masa (120) y varios elementos de deformación elástica (121) cuyas rigideces son tales que estos elementos corresponden a varias frecuencias de resonancia armónica.
15. Motor según la reivindicación 3, caracterizado porque el o los elementos de deformación elásticos están realizados en polímero semicristalino.
Patentes similares o relacionadas:
IMPULSOR PIEZOELÉCTRICO DE TIPO SLIP-STICK, del 13 de Diciembre de 2011, de SPECS ZURICH GMBH: Un impulsor piezoeléctrico de tipo slip-stick que comprende al menos un accionador piezoeléctrico y al menos un impulsor para aplicar una tensión a dicho […]
 PERFECCIONAMIENTO DE LOS MATERIALES DE ACCIONADORES DE PISTON ACTIVO, del 27 de Noviembre de 2009, de SAGEM DEFENSE SECURITE: Accionador que comprende un cilindro interior de deslizamiento (7, 7'') y un cilindro exterior (5, 5'') en el que dicho cilindro de deslizamiento […]
PERFECCIONAMIENTO DE LOS MATERIALES DE ACCIONADORES DE PISTON ACTIVO, del 27 de Noviembre de 2009, de SAGEM DEFENSE SECURITE: Accionador que comprende un cilindro interior de deslizamiento (7, 7'') y un cilindro exterior (5, 5'') en el que dicho cilindro de deslizamiento […]
 PERFECCIONAMIENTOS EN LOS ROTORES DE MOTORES DE ALTA POTENCIA, del 13 de Mayo de 2010, de SAGEM DEFENSE SECURITE: Sistema, adaptado en particular para los motores de alta potencia, que comprende por lo menos un rotor (1a; 1b) y unos medios (4a, 4b; 5a, 5b) […]
PERFECCIONAMIENTOS EN LOS ROTORES DE MOTORES DE ALTA POTENCIA, del 13 de Mayo de 2010, de SAGEM DEFENSE SECURITE: Sistema, adaptado en particular para los motores de alta potencia, que comprende por lo menos un rotor (1a; 1b) y unos medios (4a, 4b; 5a, 5b) […]
 DISPOSITIVO DE UNA TRANSMISION EN UN MOTOR ELECTROMECANICO, del 23 de Diciembre de 2009, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para transmitir una fuerza de accionamiento entre un anillo de accionamiento y una pieza interior rodeada por el anillo de accionamiento , que […]
DISPOSITIVO DE UNA TRANSMISION EN UN MOTOR ELECTROMECANICO, del 23 de Diciembre de 2009, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para transmitir una fuerza de accionamiento entre un anillo de accionamiento y una pieza interior rodeada por el anillo de accionamiento , que […]
Sistema de posicionamiento de fibras ópticas, del 6 de Julio de 2016, de The Commonwealth of Australia as represented by The Department of Innovation, Industry, Science and Research: Un sistema de posicionamiento para anclar un terminal de fibra en una ubicación en una placa de campo de un telescopio, comprendiendo el sistema de posicionamiento: […]
 APARATO PARA GENERAR ENERGIA ELECTRICA A PARTIR DE LA COMPRESION MECANICA DE TRANSDUCTORES PIEZOELECTRICOS, del 24 de Septiembre de 2015, de VILLASEÑOR AGUILLÓN, José Humberto: Aparato para la generación de energía a partir del estrés mecánico aplicado a dicho aparato. El aparato comprende un conjunto de secciones que forman el contenedor para […]
APARATO PARA GENERAR ENERGIA ELECTRICA A PARTIR DE LA COMPRESION MECANICA DE TRANSDUCTORES PIEZOELECTRICOS, del 24 de Septiembre de 2015, de VILLASEÑOR AGUILLÓN, José Humberto: Aparato para la generación de energía a partir del estrés mecánico aplicado a dicho aparato. El aparato comprende un conjunto de secciones que forman el contenedor para […]
 Conjunto que genera energía eléctrica mediante piezoelectricidad, del 25 de Junio de 2014, de ABCCUS SOLUCIONES E INNOVACION S.L: Disposición óptima y conexión de elementos piezoeléctricos para energy harvesting (Recolección de Energía), que será utilizado para maximizar la energía eléctrica generada […]
Conjunto que genera energía eléctrica mediante piezoelectricidad, del 25 de Junio de 2014, de ABCCUS SOLUCIONES E INNOVACION S.L: Disposición óptima y conexión de elementos piezoeléctricos para energy harvesting (Recolección de Energía), que será utilizado para maximizar la energía eléctrica generada […]
MOTOR VIBRATORIO Y METODO DE HACER Y USAR EL MISMO., del 1 de Julio de 2006, de ELLIPTEC RESONANT ACTUATOR AG: Un sistema vibratorio para mover un elemento accionado , que comprende: Un elemento vibratorio que tiene un elemento piezoeléctrico en comunicación de accionamiento […]