MONITORIZACION DE POSICION CON RESPECTO AL CONTACTO CON EL FONDO.
Monitorización de posición con respecto al contacto con el fondo.
La invención se refiere a un método para monitorizar la posición de módulos de guía para artes o aparejos de pesca con respecto al contacto con el fondo, que comprende tomar medidas de un primer ángulo para el módulo de guía, calcular la media y la desviación estándar para las medidas angulares, y en base a la media y la desviación estándar, proporcionar una indicación de posición para el módulo de guía con respecto al contacto con el fondo. La invención también se refiere a un aparato para monitorizar la posición
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NO2005/000037.
Solicitante: SKJOLD-LARSEN, HENNING.
Nacionalidad solicitante: Noruega.
Dirección: OVRE STRANDVEI 6, N-3120 TONSBERG NORUEGA.
Inventor/es: SKJOLD-LARSEN, HENNING.
Fecha de Publicación: .
Fecha de Concesión: 22 de Marzo de 2010.
Clasificación Internacional de Patentes:
- A01K73/02B
Clasificación PCT:
- A01K73/02 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01K CRÍA DE ANIMALES; AVICULTURA; APICULTURA; PISCICULTURA; PESCA; ANIMALES PARA CRIA O REPRODUCCIÓN, NO PREVISTOS EN OTRO LUGAR; NUEVAS VARIEDADES DE ANIMALES. › A01K 73/00 Redes de arrastre para pesca. › Trainas.
- A01K75/00 A01K […] › Accesorios para redes de pesca; Detalles de redes de pesca, p. ej. estructura.
Clasificación antigua:
Fragmento de la descripción:
Monitorización de posición con respecto al contacto con el fondo.
El presente invento se refiere a un método y un aparato para vigilar la posición de módulos de guía para artes de pesca con respecto al contacto con el fondo.
La finalidad de monitorización del contacto con el fondo es poder determinar óptimamente la posición del arte de pesca en el agua.
Durante las operaciones de arrastre es importante saber si el aparejo de arrastre o equipo asociado está en contacto con el fondo. En arrastres de fondo es deseable, por ejemplo, tener contacto con el fondo la mayor parte del tiempo, con el fin de asegurar la captura del pescado que nada muy cerca del fondo, o para establecer una nube de polvo en el fondo que auyente el pescado hacia el aparejo de pesca.
Todas las demás veces es deseable mantener una cierta distancia del fondo (arrastre pelágico), por ejemplo para proteger el coral y otras plantas y animales.
No menos importante es mantener una cierta distancia con respecto al fondo o mantener un contacto con el fondo que esté limitado a la superficie del mismo para evitar que el aparejo de pesca se incruste en el fondo.
La posición del aparejo de arrastre dependerá, por supuesto, del tipo de pescado a capturar.
De acuerdo con la técnica anterior, se utilizan sensores de contacto de fondo para determinar si el arrastre se está desplazando o no a lo largo del fondo. Un sensor de contacto de fondo es un cuerpo tubular fijado al aparejo de fondo del arrastre en un extremo, colgando libremente el otro extremo. El sensor de contacto de fondo indicará "contacto de fondo"/"no contacto de fondo" dependiendo del ángulo entre la dirección longitudinal del cuerpo tubular y la dirección horizontal. Cuando el aparejo de fondo se mueve libremente, la dirección longitudinal del cuerpo tubular formará un ángulo más pequeño que cuando existe contacto con el fondo. Sin embargo, si existen grandes irregularidades en el fondo, es decir depresiones y elevaciones, el sensor de contacto de fondo no será capaz de proporcionar una información fiable.
Un ejemplo de un cuerpo tubular de este tipo se describe en la patente de EE.UU. Nº 5,347,860, que expone un dispositivo para la medida del tiempo real sobre el fondo de un aparejo de arrastre utilizado para muestreo de fauna y flora de fondo. La posición del cuerpo tubular activa un contador que registra el tiempo sobre el fondo.
Los grandes aparejos de pesca, tales como los arrastres, comprenden módulos de guía que aseguran que se mantiene una cierta apertura del arrastre durante el proceso de pesca. Un ejemplo de tal módulo es el denominado aparejo de fondo, una de cuyas funciones es asegurar que el arrastre se desplaza a lo largo del fondo. Otro ejemplo corresponde a las denominadas puertas, que en su forma más común son cuerpos planos alargados que se fijan al arrastre, por ejemplo mediante barrederas de draga o alambres.
Una puerta de arrastre de la que se tira a lo largo del fondo tendrá una posición angular particular, y será posible también que oscile o balancee alrededor de dicha posición angular. Las oscilaciones se deben en parte a irregularidades en el fondo. Cuando la puerta está a punto de perder contacto con el fondo, las oscilaciones tendrán una amplitud y frecuencia mayores que cuando se tira de la puerta a lo largo del fondo. Cuando la puerta ha perdido contacto con el fondo, estará sometida solamente a fuerzas hidrodinámicas, y esto dará lugar a una posición angular casi estable. Si se baja entonces la puerta, experimentará nuevamente vibraciones hasta que se alcance una nueva posición angular estable en la cual las fuerzas de rozamiento contra el fondo interaccionan con las fuerzas hidrodinámicas. Por tanto, será posible vigilar la posición de la puerta con respecto al contacto con el fondo, es decir si se empuja a lo largo del fondo ("contacto con el fondo"), si se desplaza solamente en el agua ("no contacto con el fondo") o si existe una transición entre estas dos posiciones ("transición"), por medio de la posición angular de la puerta.
La posición angular de la puerta puede describirse por medio de tres ángulos:
a) Angulo de ataque: el arrastre se mueve en una dirección y la puerta sigue este movimiento, mientras el plano de la puerta forma un ángulo con la dirección del desplazamiento. Se hará referencia posteriormente a este primer ángulo, es decir el ángulo entre un eje horizontal del plano de la puerta y la dirección de movimiento del barco, como ángulo de ataque.
b) Angulo de alabeo: el plano de la puerta formará un ángulo con el plano vertical; se hará referencia posteriormente a este como ángulo de alabeo.
c) Angulo de cabeceo: el ángulo que forma el eje horizontal del la puerta con un plano horizontal se llama ángulo de cabeceo.
Como se ha mencionado anteriormente, la posición angular de la puerta variará dependiendo de su posición. En las transiciones a y desde el fondo, la posición angular es inestable, y esto se reflejará en cambios relativamente acusados en algunos de dichos ángulos.
De este modo, será posible utilizar la posición angular de la puerta y sus variaciones para vigilar la posición, o sea para comprobar si existe o no contacto con el fondo, y opcionalmente para deducir características relativas a la situación del contacto con el fondo. Estos últimos términos se refieren a que el análisis de la posición angular permitirá conocer si la puerta está hundida en el fondo, si el borde inferior o solo una parte del mismo tiene contacto con el fondo, si existe cualquier irregularidad en el fondo, etc.
El método acuerdo con el invento está caracterizado así porque comprende las operaciones de:
- - tomar medidas de un primer ángulo para el módulo de guía;
- - calcular la media y la desviación estándar para las medidas angulares;
- - en base a la media y a la desviación estándar, proporcionar una indicación de posición para el módulo de guía con respecto al contacto con el fondo.
El primer ángulo puede ser el ángulo de alabeo, el ángulo de cabeceo o el ángulo de ataque, y en una realización preferida del invento se utiliza el ángulo de alabeo para proporcionar la indicación de posición.
Es posible también medir un segundo ángulo además del primero, y utilizar la media y la desviación estándar para el segundo ángulo en combinación con los valores del primer ángulo con el fin de proporcionar la indicación de posición. Si el primer ángulo es el ángulo de alabeo, sería natural elegir el ángulo de cabeceo como segundo ángulo.
La indicación de posición podría tomar varias formas. En algunos casos dará lugar simplemente a la visualización de un mensaje del tipo "contacto con el fondo/no contacto con el fondo" en el módulo, o indicará la situación directamente mostrando el valor de la media y la desviación estándar, mientras que en otros casos será proporcionada una señal de indicación de posición que podría mostrar el tiempo transcurrido en la posición asociada al contacto con el fondo.
La señal o señales de indicación de posición podrían también transmitirse a un receptor en la superficie por medio de una conexión por cable, acústicamente, por señales de radio o inalámbricamente por cualquier otro medio. Esto permitiría tener una indicación del tipo "contacto con el fondo/transición/no contacto con el fondo" a bordo del barco. Esto sería muy útil, especialmente si está implicada una transición, puesto que sería posible iniciar medidas rápidas para evitar la situación de contacto con el fondo/flotación libre.
La señal o señales de indicación de posición pueden almacenarse en una memoria en el módulo. El invento comprende también la transmisión de la señal o señales de indicación de posición a un dispositivo de visualización.
Finalmente, el método de acuerdo con una realización del invento comprenderá la operación de controlar la posición del módulo en base a la señal o señales de indicación de posición y los valores deseados. En relación con esto, los valores deseados pueden ser valores para la media, desviación estándar u otras variables que indican la posición del módulo. Tanto una alternativa en la que el valor deseado es posición = contacto con el fondo (para arrastres de fondo, como una alternativa en la que el valor deseado es posición = no contacto con el fondo (para arrastres pelágicos),...
Reivindicaciones:
1. Un método para vigilar la posición de módulos de guía para un aparejo de pesca con respecto al contacto con el fondo, que comprende las operaciones de: tomar medidas de un primer ángulo para el módulo de guía; calcular la media y la desviación estándar para las medidas angulares; y en base a la media y la desviación estándar, proporcionar una indicación de posición para el módulo de guía con respecto al contacto con el fondo.
2. Un método de acuerdo con la reivindicación 1ª, caracterizado porque el primer ángulo es el ángulo de alabeo, el ángulo de cabeceo o el ángulo de ataque.
3. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, caracterizado porque comprende la toma de medidas de un segundo ángulo seleccionado de entre el ángulo de alabeo, el ángulo de cabeceo y el ángulo de ataque.
4. Un método de acuerdo con la reivindicación 3ª, caracterizado porque comprende la operación de calcular la media y la desviación estándar para las medidas del segundo ángulo, y proporcionar una indicación de posición para el módulo de guía con respecto al contacto con el fondo en base a la media/desviación estándar para ambos ángulos.
5. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, caracterizado por proporcionar una señal de indicación de posición en base a la indicación de posición.
6. Un método de acuerdo con la reivindicación 5ª, caracterizado por transmitir la señal o señales de indicación de posición a un receptor situado en la superficie por medio de una conexión de cable, acústicamente, por radio o inalámbricamente por algún otro medio.
7. Un método de acuerdo con la reivindicación 5ª, caracterizado porque comprende el almacenamiento de la señal o señales de indicación de posición en una unidad de memoria en el módulo.
8. Un método de acuerdo con la reivindicación 5ª, caracterizado por transmitir la señal o señales de indicación de posición a un dispositivo de visualización.
9. Un método de acuerdo con la reivindicación 5ª, caracterizado porque comprende la operación de controlar la posición del módulo en base a la señal o señales de indicación de posición y valores deseados.
10. Un método de acuerdo con la reivindicación 1ª, caracterizado porque el módulo es una puerta, un lastre, una barredera o un aparejo de fondo para un aparejo de pesca, por ejemplo un aparejo de arrastre.
11. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, caracterizado porque las medidas angulares se realizan utilizando un inclinómetro.
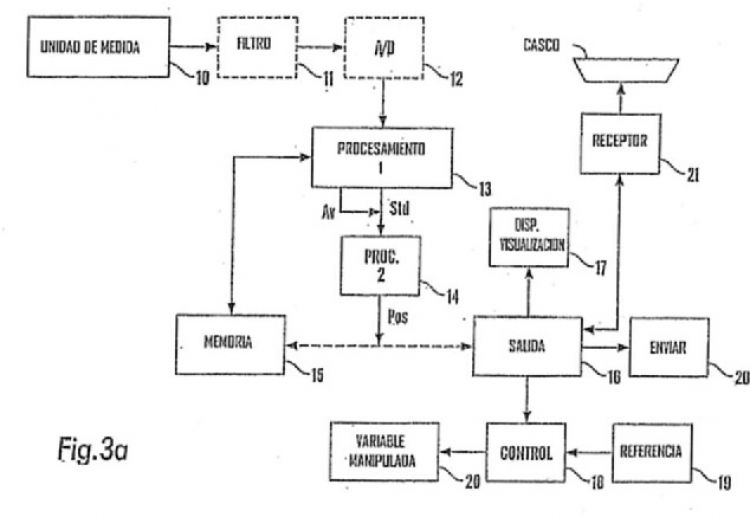
12. Un aparato para vigilar la posición de módulos de guía para aparejos de pesca con respecto al contacto con el fondo, que comprende: una unidad de medida para medir un primer ángulo para el módulo de guía; una unidad de procesamiento destinada a calcular la media y la desviación estándar para las medidas angulares y, en base a la media y la desviación estándar, proporcionar una indicación de posición para el módulo de guía con respecto al contacto con el fondo; y una unidad de memoria.
13. Un aparato de acuerdo con la reivindicación 12ª, caracterizado porque la unidad de medida está destinada a medir el ángulo de alabeo, el ángulo de cabeceo o el ángulo de ataque.
14. Un aparato de acuerdo con cualquiera de las reivindicaciones precedentes 12ª o 13ª, caracterizado porque la unidad de medida está destinada a medir un segundo ángulo seleccionado de entre el ángulo de alabeo, el ángulo de cabeceo y el ángulo de ataque.
15. Un aparato de acuerdo con cualquiera de las reivindicaciones precedentes 12ª a 14ª, caracterizado porque la unidad de procesamiento está destinada a calcular la media y la desviación estándar para las medidas del segundo ángulo, y a proporcionar una indicación de posición en base a la media/desviación estándar para ambos ángulos.
16. Un aparato de acuerdo con cualquiera de las reivindicaciones precedentes 12ª a 15ª, caracterizado porque comprende una unidad de salida conectada a la unidad de procesamiento para proporcionar una señal de indicación de posición en base a la indicación de posición.
17. Un aparato de acuerdo con la reivindicación 16ª, caracterizado porque comprende una unidad transmisora para transmitir la señal de indicación de posición a un receptor.
18. Un aparato de acuerdo con la reivindicación 16ª, caracterizado porque la unidad de memoria está destinada a almacenar la señal de indicación de posición.
19. Un aparato de acuerdo con la reivindicación 16ª, caracterizado porque comprende una unidad de control conectada a la unidad de salida para controlar la posición del módulo en base a la señal de indicación de contacto con el fondo y valores deseados.
20. Un aparato de acuerdo con la reivindicación 13ª, caracterizado porque la unidad de medida es un inclinómetro de uno, dos o tres ejes.
Patentes similares o relacionadas:
Aparato y método para recolectar animales acuáticos, del 10 de Diciembre de 2019, de THE NEW ZEALAND INSTITUTE FOR PLANT AND FOOD RESEARCH LIMITED: Un aparato para recolectar animales acuáticos, que comprende: una porción de copo que tiene un extremo anterior (2a) abierto y un extremo posterior (2b) cerrado […]
Cuerdas de pesca que emiten luz y uso de las mismas, del 19 de Junio de 2019, de Lankhorst Euronete Portugal, S.A: Una cuerda de pesca que se proporciona en al menos parte de su superficie exterior con un material luminiscente, cuya cuerda de pesca es una cuerda trenzada […]
Hilo metálico recubierto de resina de múltiples capas repelente de organismos y red de pesca que comprende el mismo, del 19 de Febrero de 2019, de Towaron Co., Ltd: Hilo metálico recubierto de resina de múltiples capas que comprende: un hilo recubierto de resina; y una capa de liberación de iones […]
Método no destructivo para determinar la resistencia a la apertura de las mallas de una red, del 17 de Septiembre de 2018, de UNIVERSIDADE DA CORUÑA: Método no destructivo para determinar la resistencia a la apertura de las mallas de una red, que comprende las etapas de: (a) distanciar entre sí dos nudos de […]
Retel con microcámara, del 22 de Noviembre de 2017, de GRUPO FUNCIONA TASK FORCE S.L: 1. Retel con microcámara caracterizado porque en su interior dispone de una microcámara de vídeo conectada con una pantalla destinada visualizar las imágenes captadas por la […]
Composición de recubrimiento antiincrustante y uso de la misma, del 17 de Mayo de 2017, de CHUGOKU MARINE PAINTS, LTD.: Una composición de recubrimiento antiincrustante que comprende un copolímero hidrolizable (A) y un agente antiincrustante (B), en la que el […]
APARATO LIMPIADOR DE REDES DE PESCA, del 12 de Enero de 2017, de DE LA TORRE MARTINEZ, Juan Benito: 1. Aparato limpiador de redes de pesca, comprendiendo una estructura que tiene dos soportes laterales (1a, 1b) situados en lados opuestos de un área […]
Uso de una aleación de cobre para la cría de animales marinos, del 10 de Febrero de 2016, de WIELAND-WERKE AG: Uso de una aleación de cobre compuesta por (en % en peso): 51,8 a 84,0% de Cu, 15,5 a 36,0% de Zn, 0,35 a 3,0% de Sn, 0,12 a 1,5% de Fe, […]