MÓDULO PARA LA FABRICACIÓN DE ESTRUCTURAS MÓVILES AUTOMATIZADAS Y A UNA ESTRUCTURA MODULAR MÓVIL.
Un módulo (1) para la fabricación de estructuras móviles automatizadas que comprende un primer elemento sustancialmente con forma de placa (2) y un segundo elemento sustancialmente con forma de placa (3) que están encarados entre sí y están mutuamente articulados de forma que pueden oscilar mediante la interposición de medios bisagra (4) y medios (5) para activar la oscilación relativa de dichos primer y segundo elementos sustancialmente con forma de placa (2,
3) dichos medios bisagra (4) comprendiendo una bisagra cilíndrica que está provista entre dicho primer elemento sustancialmente con forma de placa (2) y dicho segundo elemento sustancialmente con forma de placa (3) y define un único eje (A) para su oscilación relativa de forma que dicho eje de oscilación (A) esté sustancialmente paralelo y distal de ambos planos de disposición de dicho primer y segundo elemento sustancialmente con forma de placa (2, 3), dichos medios de activación (5) siendo del tipo lineal y actuando a lo largo de una dirección (B) que incide respecto a los planos de disposición de dicho primer y segundo elemento sustancialmente con forma de placa (2, 3), dichos medios de activación (5) del tipo lineal teniendo extremos opuestos (11a, 11b) asociados con un respectivo elemento de soporte (9) que está articulado de forma que puede oscilar alrededor de un eje que es sustancialmente paralelo a dicho eje de oscilación relativa (A) respectivamente a dicho primer elemento, sustancialmente con forma de placa (2) y a dicho segundo elemento sustancialmente con forma de placa (3), cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprendiendo un asiento de paso (10) para comodar y permitir la oscilación de dicho respectivo elemento de soporte (9), y dichos medios de activación (5) del tipo lineal comprendiendo un eje (11) que tiene, en sus extremos opuestos, dos porciones roscadas (11a, 11b) con roscas mutuamente opuestas, que están acopladas a correspondientes roscas hembra (12) rígidamente asociadas con dicho respectivo elemento de soporte (9), dicho eje (11) estando adaptado para ser girado en las dos direcciones opuestas
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2006/002014.
Solicitante: SALPO S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA GIACINTO GALLINA, 4 34122 TRIESTE ITALIA.
Inventor/es: VACCANI,Lucio.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Julio de 2006.
Clasificación Internacional de Patentes:
- B25J18/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 18/00 Brazos. › flexibles.
- B25J9/06 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizados por brazos de articulaciones múltiples.
Clasificación PCT:
- B25J18/06 B25J 18/00 […] › flexibles.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2357881_T3.pdf

Fragmento de la descripción:
Campo técnico
La presente invención hacer referencia a un módulo para la fabricación de estructuras móviles automatizadas y a una estructura modular móvil automatizada.
Estado de la técnica.
Los robots industriales del tipo programable han sido conocidos durante mucho tiempo que se utilizan como sustitución de los seres humanos para realizar operaciones de forma autónoma y automáticamente repetitivas, complejas o de trabajo peligroso, tales como el manejo y movimiento de objetos, herramientas o instrumentos.
Los robots industriales son utilizados en diversos sectores industriales, por ejemplo para manejar partes que son mecanizadas, manejar herramientas tales como cabezales soldadores y/o cortadores o pistolas de pintura, o para montar o desmontar productos, en laboratorios de análisis, por ejemplo para manejar sustancias peligrosas, en el campo médico, por ejemplo para realizar procedimientos diagnósticos o quirúrgicos, y en otros campos.
Uno de los principales componentes mecánicos de un robot industrial es el llamado brazo articulado, es decir el elemento de manejo provisto de una mano o cabezal para agarrar el objeto, herramienta o instrumento a ser movido o manejado.
Los brazos articulados de robots conocidos sufren inconvenientes, incluyendo el hecho de que tienen bajas velocidades de movimiento; en aplicaciones industriales, esto provoca, por ejemplo, tiempos de procesamiento o producción desventajosamente largos.
Otro inconveniente del brazo articulado convencional consiste en que no permite proveer y controlar trayectos de movimiento complejos.
Otro inconveniente del brazo articulado convencional consiste en que es voluminoso y requiere un área de maniobra grande, y esto impide su uso en espacios reducidos y confinados que son difíciles de alcanzar.
Explicación de la invención
El objetivo de la presente invención es eliminar los inconvenientes señalados anteriormente de los brazos articulados de robots industriales del tipo conocido proveyendo un módulo para proveer estructuras móviles automatizadas con velocidades de movimiento más altas.
Dentro de este objetivo, un objeto de la presente invención es proveer un módulo para la fabricación de estructuras móviles automatizadas que permita proveer y controlar con precisión incluso trayectos de movimiento complejos.
JP-A-60 009 676 muestra una estructura manipuladora que tiene un mecanismo de enlace cuadrilateral, incluyendo una barra de enlace y una rosca de bola dispuestas o puestas entre sí entre pares de placas base adyacentes que constituyen cooperadoramente el mecanismo de enlace cuadrilateral. La barra de enlace puede ser pivotada en ambos extremos a respectivas placas base adyacentes. La rosca de bola tiene: un extremo enroscado en una tuerca de bola enlazada a través de una articulación giratoria a una placa base; y otro extremo enlazado a través de una articulación giratoria a la otra placa base y operada por un eje de transmisión flexible.
US-A-3 497 083 muestra un brazo manipulador tensor que incluye una serie de placas que están interconectadas mediante juntas universales de forma que las placas puedan pivotar respecto las unas de las otras y puedan alinearse a lo largo de un eje central común. Cada placa tiene una abertura central grande que aloja una junta universal respectiva que incluye ejes de pivote perpendiculares cada uno interseccionando el eje central común, y una pluralidad de tendones están conectados a las placas en localizaciones radiales seleccionadas que pueden ser estiradas selectivamente para obtener el movimiento deseado de las placas.
Otro objeto del a presente invención es proveer un módulo para la fabricación de estructuras móviles automatizadas que sean compactas y requieran áreas de maniobra reducidas, para poder trabajar incluso en espacios reducidos y confinados o espacios que son difíciles de alcanzar.
Otro objeto de la presente invención es proveer un módulo para la fabricación de estructuras móviles automatizadas que sea flexible y que pueda adaptarse fácilmente a diferentes usos.
Aún otro objeto de la presente invención es conseguir dicho objetivo y objetos con una estructura que sea simple, relativamente fácil de proveer en la práctica, segura en su uso, efectiva en su operación y relativamente baja de coste.
De acuerdo con la invención, está provisto un módulo para la fabricación de estructuras móviles automatizadas y una estructura modular móvil automatizada que comprende al menos un par de tales módulos, tal y como se define en las reivindicaciones anexadas.
Breve descripción de los dibujos.
Otras características y ventajas de la presente invención resultarán aparentes de mejor modo a partir de la descripción detallada de un ejemplo de realización preferido pero no exclusivo de un módulo para la fabricación deestructuras móviles automatizadas y una estructura modular móvil automatizada según la invención, ilustrado mediante ejemplo no limitador en los dibujos que acompañan, en los que:
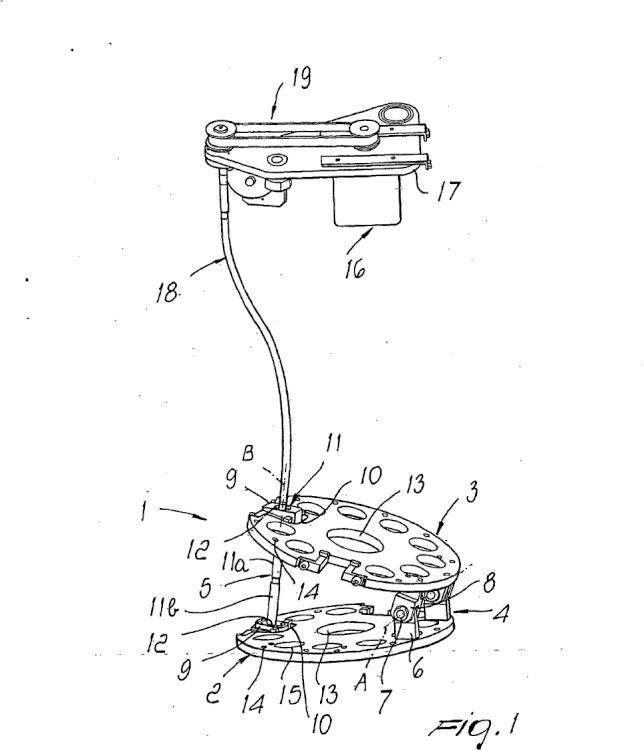
La figura 1 es una vista de perspectiva de un módulo según la invención, asociado con respectivos medios de motor con la interposición de medios de transmisión;
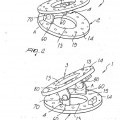
Las figuras 2 y 3 son vistas de perspectiva esquemáticas de dos módulos según la invención, con medios bisagra en dos posiciones diferentes;
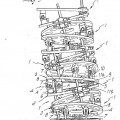
La figura 4 es una vista de perspectiva de una estructura modular móvil automatizada según la invención en la configuración abierta;
La figura 5 es una vista de perspectiva de una estructura modular móvil automatizada según la invención en la configuración cerrada.
Formas de realizar la invención
Con referencia particular a las figuras, el número de referencia 1 generalmente designa un módulo para la fabricación de estructuras móviles automatizadas.
Se especifica que en la presente invención los adjetivos “primero” y “segundo” se utilizan solo para distinguir los elementos que especifican, sin constituir esto limitación alguna del ámbito protectivo de la presente invención.
El módulo 1 comprende un primer elemento sustancialmente con forma de placa, que está constituido por una primera placa 2, y un segundo elemento sustancialmente con forma de placa, que está constituido por una segunda placa 3.
La primera placa 2 y la segunda placa 3 están encaradas entre sí y están mutuamente articuladas para oscilar interponiendo medios bisagra 4. Medios 5 para activar su oscilación relativa actúan entre la primera placa 2 y la segunda placa 3.
Los medios bisagra 4 están constituidos por un bisagra cilíndrica, que está provista entre la primera placa 2 y la segunda placa 3 y define un eje A para su mutua oscilación; el eje de oscilación relativa A está sustancialmente paralela a los planos de disposición de la primera placa 2 y de la segunda placa 3.
La variación de la distancia relativa de los medios bisagra 4, es decir, del eje de oscilación relativa A, respecto del centro de la primera placa 2 y de la segunda placa 3, provoca una variación de la anchura de oscilación, en particular de la anchura máxima de oscilación, de las dos placas, y por lo tanto de distancia o extensión del movimiento entre los puntos correspondientes de las dos placas.
Tal y como se muestra en las figuras 2 y 3, cuanto más lejos esté el eje de oscilación relativa A del centro de la primera placa 2 y de la segunda placa 3, mayor es la posibilidad de movimiento relativo entre los centros de las dos placas.
En el ejemplo de realización ilustrado, la bisagra cilíndrica comprende dos asas 6, que sobresalen en la superficie de la primera placa 2 que está de cara a la segunda placa 3; cada asa soporta un pivote 7, cuyos extremos opuestos sobresalen de forma prominente de ella con el fin de emparejarse, con la interposición de cojinetes con anillos de rodadura, con una orquilla correspondiente 8 que está provista para sobresalir en la superficie de la segunda placa 3 que está de cara a la primera placa 2.
Sin embargo, ejemplos de realización alternativos de la bisagra cilíndrica, conocidos a la persona experimentada en la técnica, no son excluidos; por ejemplo, tal bisagra puede estar constituida por dos soportes 60 y 80, que sobresalen de las superficies mutuamente encaradas de la primera placa... [Seguir leyendo]
Reivindicaciones:
1. Un módulo (1) para la fabricación de estructuras móviles automatizadas que comprende un primer elemento sustancialmente con forma de placa (2) y un segundo elemento sustancialmente con forma de placa (3) que están encarados entre sí y están mutuamente articulados de forma que pueden oscilar mediante la interposición de medios bisagra (4) y medios (5) para activar la oscilación relativa de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) dichos medios bisagra (4) comprendiendo una bisagra cilíndrica que está provista entre dicho primer elemento sustancialmente con forma de placa (2) y dicho segundo elemento sustancialmente con forma de placa
(3) y define un único eje (A) para su oscilación relativa de forma que dicho eje de oscilación (A) esté sustancialmente paralelo y distal de ambos planos de disposición de dicho primer y segundo elemento sustancialmente con forma de placa (2, 3), dichos medios de activación (5) siendo del tipo lineal y actuando a lo largo de una dirección (B) que incide respecto a los planos de disposición de dicho primer y segundo elemento sustancialmente con forma de placa (2, 3), dichos medios de activación (5) del tipo lineal teniendo extremos opuestos (11a, 11b) asociados con un respectivo elemento de soporte (9) que está articulado de forma que puede oscilar alrededor de un eje que es sustancialmente paralelo a dicho eje de oscilación relativa (A) respectivamente a dicho primer elemento, sustancialmente con forma de placa (2) y a dicho segundo elemento sustancialmente con forma de placa (3), cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprendiendo un asiento de paso (10) para comodar y permitir la oscilación de dicho respectivo elemento de soporte (9), y dichos medios de activación (5) del tipo lineal comprendiendo un eje (11) que tiene, en sus extremos opuestos, dos porciones roscadas (11a, 11b) con roscas mutuamente opuestas, que están acopladas a correspondientes roscas hembra (12) rígidamente asociadas con dicho respectivo elemento de soporte (9), dicho eje (11) estando adaptado para ser girado en las dos direcciones opuestas.
2. El módulo (1) según la reivindicación 1, caracterizado por el hecho de que dichos medios de activación de tipo lineal son del tipo operados por un medio fluido.
3. El módulo (1) según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) es sustancialmente circular.
4. El módulo (1) según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende una abertura central (13) para la contención y el paso de sistemas de servicio o partes suyas.
5. El módulo (1) según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende al menos un orificio de referencia (14) para el posicionamiento de otro dicho módulo (1).
6. El módulo (1) según la reivindicación 5, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende una pluralidad de dichos orificios de referencia (14) distribuidos a lo largo de una primera circunferencia que es sustancialmente concéntrica allí.
7. El módulo (1) según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende respectivos elementos de soporte o anclaje.
8. El módulo (1) según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que comprende medios de motor (16) asociados con dichos medios de activación (5).
9. El módulo (1) según la reivindicación 8, caracterizado por el hecho de que comprende medios de transmisión de movimiento (18) que están interpuestos entre dichos medios de motor (16) y dichos medios de activación (5).
10. El módulo (1) según la reivindicación 8 o 9, caracterizado por el hecho de que dichos medios de motor (16) son remotos respecto de dichos medios de activación (5).
11. El módulo (1) según las reivindicaciones 9 y 10, caracterizado por el hecho de que dichos medios de transmisión comprenden un eje flexible (18), que es girado por dichos medios de motor (16) y está asociado en un extremo con dichos medios de activación (5).
12. El módulo (1) según la reivindicación 9 u 11, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende al menos un orificio (15) para el paso de dichos medios de transmisión (18).
13. El módulo (1) según la reivindicación 12, caracterizado por el hecho de que cada uno de dichos primer y segundo elementos sustancialmente con forma de placa (2, 3) comprende una pluralidad de dichos orificios de paso
(15) distribuidos a lo largo de una segunda circunferencia que es concéntrica allí.
14. El módulo (1) según la reivindicación 8 o 9, caracterizado por el hecho de que dichos medios de motor y dichos medios de transmisión son locales respecto de dichos medios de activación.
15. Una estructura modular móvil automatizada (2), caracterizada por el hecho de que comprende al menos un par de módulos (1) según una o más de las reivindicaciones 1 a 14 dispuestos en series unos sobre otros, el segundo elemento sustancialmente con forma de placa (3) de uno de los módulos (1) de dicho par coincidiendo con el primer elemento sustancialmente con forma de placa (2) del otro módulo (1) de dicho par.
5 16. La estructura según la reivindicación 15, caracterizada por el hecho de que comprende una pluralidad de dichos módulos (1) dispuestos en series, el segundo elemento sustancialmente con forma de placa (3) de uno de los módulos (1) de dicha serie coincidiendo con el primer elemento sustancialmente con forma de placa (2) del módulo (1) que la sigue.
17. La estructura según la reivindicación 15 o 16, caracterizada por el hecho de que comprende una base asociada 10 con uno de los dos módulos finales (1) de dicho par o de dicha serie.
18. La estructura según una o más de las reivindicaciones de 15 a 17, caracterizada por el hecho de que comprende un cabezal de agarre, que está asociado con uno de los dos módulos finales uno de dicho par o de dicha serie.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Robot de brazo manipulador subacuático, del 24 de Junio de 2020, de Eelume AS: Un robot serpiente subacuático que comprende: una pluralidad de enlaces que están conectados entre sí mediante módulos de articulaciones […]
BRAZO ROBOTICO SERVIDOR DE PRODUCTOS PARA LA RESTAURACION, del 18 de Junio de 2020, de MARTIN SANCHEZ, Victor: 1. Brazo robótico servidor de producto para la restauración, constituido a partir de un brazo robótico con las características propias de un robot industrial […]
Brazo articulado por secciones oblicuas, del 14 de Diciembre de 2018, de FERRÍN POZUELO, Rafael: Brazo articulado por secciones oblicuas. El brazo articulado objeto de la invención comprende una sucesión de primeros codos y segundos codos situados […]
Instrumentos quirúrgicos articulados y métodos para desplegar los mismos, del 11 de Abril de 2018, de Medrobotics Corporation: Una herramienta quirúrgica que comprende: un primer conjunto alargado que comprende una región de articulación ; y un segundo conjunto alargado […]
Dispositivo de sonda articulado extensible, del 6 de Diciembre de 2017, de CARNEGIE MELLON UNIVERSITY: Un dispositivo de sonda articulado que comprende: un primer mecanismo que comprende: un primer miembro de articulación posicionado en una zona proximal […]
ROBOT INDUSTRIAL MULTI-EJES, del 7 de Agosto de 2017, de ORTEGA MUÑOZ, David: Robot industrial multi-ejes que comprende una cadena de elementos unidos entre sí por medio de unas articulaciones móviles accionadas y movidas por […]
HERRAMIENTA, SISTEMA Y PROCEDIMIENTO AUTOMATIZADO DE TOMA DE MUESTRAS, del 9 de Febrero de 2017, de VERA CAMPOS, Claudio: Un herramienta o aparato de muestreo automatizada para concentrados de mineral que comprende al menos un plato maestro de cambio automático; al menos un plato esclavo […]