METODO DE SUPERVISION DE LA FUNCIONALIDAD DE UN ELEMENTO DE CORTE DE FLUJO Y SISTEMA DE DETENCION DEL FLUJO, PARA UN CIRCUITO EXTRACORPOREO DE FLUIDO.
Método de supervisión de la funcionalidad de un elemento para cortar el flujo de un fluido a través de un circuito extracorpóreo (2),
teniendo dicho circuito (2) al menos un tramo de tubo deformable (10) en el cual actúa al menos un elemento de corte de flujo (9) que tiene al menos una parte móvil (11) que puede ser accionada para alternar entre un estado de apertura, en el cual la misma permite el paso del fluido, y al menos un estado de cierre, en el cual la misma impide el paso del fluido por dicho tramo de tubo (10), comprendiendo dicho método las fases siguientes:
- desplazar la parte móvil (11) del elemento de corte (9) para hacerla pasar de dicho estado de apertura a dicho estado de cierre;
- asociar al menos un parámetro dinámico con un movimiento de dicha parte móvil (11);
- determinar un valor de dicho parámetro dinámico que es al menos uno con respecto a dicha parte móvil (11) al menos durante dicho movimiento;
- verificar que el valor adoptado por dicho parámetro dinámico satisfaga un criterio de aceptabilidad predeterminado
Tipo: Resumen de patente/invención. Número de Solicitud: W0300448IB.
Solicitante: GAMBRO LUNDIA AB.
Nacionalidad solicitante: Suecia.
Dirección: P.O. BOX 10101,S-220 10 LUND.
Inventor/es: TONELLI, CLAUDIO, PARALUPPI, MARCO.
Fecha de Publicación: .
Fecha Concesión Europea: 19 de Agosto de 2009.
Clasificación Internacional de Patentes:
- A61M39/28A
Clasificación PCT:
- A61M39/28 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › A61M 39/00 Tubos, adaptadores o conectores para tubos, válvulas, vías de acceso o similares, especialmente concebidos para uso médico (para los dispositivos respiratorios, p. ej. tubos traqueales A61M 16/00; válvulas cardiacas artificiales A61F 2/24). › Medios de sujeción por apriete de tubos flexibles, p. ej. abrazaderas de rodillo.
- F16K7/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16K VALVULAS; GRIFOS; COMPUERTAS; FLOTADORES PARA ACCIONAMIENTO; DISPOSITIVOS PARA VENTILAR O AIREAR. › F16K 7/00 Dispositivos de obturación con diafragma, p. ej. en los que un elemento se deforma sin ser desplazado completamente para cerrar la apertura (puertas o cierres para grandes receptáculos, que funcionan por deformación de paredes flexibles B65D 90/56; medios para obturar los tubos o las mangas F16L 55/10). › cuyo estrangulamiento se asegura por una fuerza exterior radial.
Fragmento de la descripción:
Método de supervisión de la funcionalidad de un elemento de corte de flujo y sistema de detención del flujo, para un circuito extracorpóreo de fluido.
La presente invención se refiere a un método de supervisión de la funcionalidad de un elemento de corte de flujo para un circuito extracorpóreo de fluido; y la invención también se refiere a un sistema de detención del flujo para un circuito extracorpóreo de fluido.
En particular, la invención es aplicable para asegurar el correcto funcionamiento de un elemento de corte de flujo que funcione en una tubería de retorno de la sangre al paciente en un circuito extracorpóreo conectado a un aparato de tratamiento de la sangre. La invención puede también ser aplicada para realizar una operación en el elemento de corte de flujo anteriormente mencionado si se comprueba que el mismo funciona mal.
Como es sabido, los aparatos para tratar la sangre en un circuito extracorpóreo, tales como los aparatos para tratar la insuficiencia renal mediante hemodiálisis, hemofiltración o hemodiafiltración, los aparatos de plasmaféresis, etc., usan un circuito extracorpóreo para llevar la sangre tomada de un paciente a una unidad de tratamiento de la sangre. Esta unidad consta normalmente de un cuerpo contenedor que define al menos una primera cámara, para la sangre entrante, y al menos una segunda cámara destinada a admitir las partículas indeseadas y/o el exceso de fluido que estén presentes y/o esté presente en la sangre (o en el plasma en el caso de la plasmaféresis). Las dos cámaras están separadas una de otra por una membrana semipermeable.
La primera cámara de la unidad de tratamiento es entonces conectada, aguas abajo con respecto a la dirección de movimiento de la sangre, a una derivación o tubería de retorno que lleva la sangre de regreso al paciente.
La parte terminal de la tubería de retorno de la sangre está normalmente equipada con un elemento de acceso, tal como una aguja u otro dispositivo, para conectar el circuito extracorpóreo al sistema vascular del paciente.
Inmediatamente aguas arriba de este elemento de acceso hay típicamente un elemento de interrupción del flujo que es generalmente una pinza para tubos de goma o válvula de pinza y es capaz de cerrarse sobre un tramo de tubo de la tubería de retorno de la sangre al paciente.
Más en detalle, la válvula de pinza tiene al menos una parte móvil que está diseñada para desplazarse entre un estado de apertura en el cual se permite el paso del flujo por la tubería y un estado de cierre en el cual la parte móvil de la válvula se desplaza hacia su parte fija, comprimiendo con ello el tubo y cortando por consiguiente el flujo de fluido a través del tubo.
En los usos que se han descrito anteriormente, la válvula de pinza actúa en calidad del dispositivo de seguridad final que es capaz de cortar el flujo de sangre al paciente inmediatamente al surgir cualquier mal funcionamiento o cualquier peligro para el paciente.
Con esta finalidad, la válvula de pinza puede ser controlada por una unidad de supervisión que está en comunicación con sensores o transductores que pasan a esta unidad de supervisión señales acerca de situaciones potencialmente peligrosas. Por ejemplo, la unidad de supervisión puede estar en conexión con una unidad de detección de burbujas de aire que actúa en el circuito extracorpóreo aguas arriba de la válvula de pinza: En caso de haber burbujas de aire que sean lo suficientemente grandes como para crear una situación de peligro potencial para el paciente, la unidad de supervisión cierra la pinza, impidiendo con ello que las burbujas pasen al sistema vascular del paciente.
A fin de poder asegurar la funcionalidad de la válvula de pinza, ésta última está típicamente equipada con un sensor de posición para detectar cuando la parte móvil haya alcanzado una posición predeterminada (considerada como la que corresponde al cierre del tubo) con respecto a la parte fija, tras lo cual dicho sensor envía una correspondiente señal a la unidad de supervisión. En la práctica, el sensor de posición verifica que, en condiciones de corte del flujo, la parte móvil de la pinza esté separada de la parte fija inferior por una distancia predefinida, que corresponde aproximadamente al espesor total de las paredes del tubo al estar éste comprimido por la válvula.
Es obvio que, dada su naturaleza, los sensores de posición conectados a los sistemas de corte descritos anteriormente son tan sólo capaces de proporcionar una indicación del tipo de la de conexión-desconexión, es decir que solamente son capaces de decidir si la parte móvil ha alcanzado una posición de cierre predeterminada con respecto a la parte fija y de posiblemente reconocer la presencia o ausencia de un tubo en la posición correcta dentro de la pinza.
A pesar de ser muy usados, los dispositivos de corte de flujo que acaban de ser descritos brevemente tienen una serie de limitaciones.
En primer lugar, los dispositivos que están provistos de una válvula de pinza y un sensor de posición no pueden dar información acerca de cómo la válvula realiza la transición para pasar al cierre o acerca de cómo la transición para pasar al cierre de la válvula está relacionada con la manera cómo el evento peligroso se propaga hacia la zona de acceso al paciente.
Aún haciendo referencia a una situación en la cual un dispositivo detector ha indicado la presencia de una burbuja de aire de un tamaño excesivo en una zona predeterminada del circuito extracorpóreo, la solución ideal sería la de lograr cortar completamente el flujo de sangre que va al paciente antes de que quede completamente agotado el volumen de sangre que está presente entre el tramo que contiene la burbuja y el punto de acceso al paciente. Está claro que si la pinza no actúa lo suficientemente rápido, hay un riesgo de que el evento peligroso (en este caso la burbuja de aire) sea transferido al sistema cardiovascular del paciente. Hay que destacar, sin embargo, que en realidad hay numerosos factores que pueden influenciar el funcionamiento de la pinza de seguridad; y para citar tan sólo unos pocos: la velocidad teórica de respuesta de la cadena que va del sensor que detecta el peligro a la CPU (CPU = unidad central de proceso) y a la válvula, la velocidad de propagación del evento peligroso a lo largo del circuito extracorpóreo, el rendimiento real de la válvula, las propiedades mecánicas del tramo de tubo que se ve sometido a compresión, etc.
Hay también que señalar que, en los sistemas conocidos, todo lo que puede comprobarse es si la parte móvil o las partes móviles de la válvula han alcanzado o no han alcanzado una posición relativa predeterminada con independencia de la geometría real del tramo de tubo que es sometido a compresión; y que debido a las tolerancias de fabricación las dimensiones reales del tubo pueden obviamente ser distintas de una tubería a otra, aunque el tubo tenga las mismas dimensiones nominales. En la práctica, el espesor de las paredes del tramo de tubo en el cual actúa la válvula varía entre valores mínimo y máximo dentro de un predeterminado margen de tolerancia. Por consiguiente, aunque la acción de cierre pueda ser la misma, la compresión del tubo puede ser correcta, excesiva o insuficiente, en dependencia de las dimensiones reales del tubo en cuestión. Hay que recordar aquí que el sensor de posición está diseñado para detectar cuando la parte móvil de la pinza llega a una posición predeterminada; y que esta posición corresponde a una distancia entre las partes cooperantes de las válvulas al ser alcanzada la cual el flujo que pasa por el tubo sería teóricamente cortado, suponiendo que el máximo espesor de pared del tubo esté dentro de un margen de tolerancia que se considere aceptable. Esta decisión de diseño evita las indeseables situaciones de falsas alarmas, pero no asegura que sea supervisado el corte real del flujo, particularmente cuando el tubo tenga unas paredes que tengan el espesor mínimo aunque éste esté dentro de una tolerancia que se considere aceptable. Los efectos anteriormente descritos pueden agravarse si se hace que la válvula de pinza funcione actuando repetidamente en el mismo tramo de tubo (como sucede por ejemplo en los tratamientos que se realizan con una única aguja), ocasionando con ello un deterioro del material y/o deformaciones permanentes del mismo.
La US-A-6 012 342 da a conocer un conjunto de pistón inmersor para cortar el flujo de fluido a través de un tubo flexible, teniendo el conjunto medios sensores para medir la fuerza aplicada por una punta...
Reivindicaciones:
1. Método de supervisión de la funcionalidad de un elemento para cortar el flujo de un fluido a través de un circuito extracorpóreo (2),
teniendo dicho circuito (2) al menos un tramo de tubo deformable (10) en el cual actúa al menos un elemento de corte de flujo (9) que tiene al menos una parte móvil (11) que puede ser accionada para alternar entre un estado de apertura, en el cual la misma permite el paso del fluido, y al menos un estado de cierre, en el cual la misma impide el paso del fluido por dicho tramo de tubo (10),
comprendiendo dicho método las fases siguientes:
- desplazar la parte móvil (11) del elemento de corte (9) para hacerla pasar de dicho estado de apertura a dicho estado de cierre;
- asociar al menos un parámetro dinámico con un movimiento de dicha parte móvil (11);
- determinar un valor de dicho parámetro dinámico que es al menos uno con respecto a dicha parte móvil (11) al menos durante dicho movimiento;
- verificar que el valor adoptado por dicho parámetro dinámico satisfaga un criterio de aceptabilidad predeterminado.
2. Método según la reivindicación 1, caracterizado por el hecho de que la fase de desplazar la parte móvil (11) del elemento de corte (9) supone comprimir progresivamente dicho tramo de tubo (10).
3. Método según la reivindicación 1, caracterizado por el hecho de que el valor de dicho parámetro dinámico es determinado en relación con al menos una primera posición adoptada por la parte móvil (11), siendo dicha primera posición intermedia entre una posición de reposo, que es adoptada por la parte móvil (11) en el estado de apertura del elemento de corte (9), y una posición de trabajo, que es adoptada por la parte móvil (11) en el estado de cierre del elemento de corte.
4. Método según la reivindicación 1, caracterizado por el hecho de que dicho parámetro dinámico, que es al menos uno, está destinado a describir un estado de funcionamiento de dicha parte móvil (11) y es seleccionado de entre los parámetros dinámicos siguientes:
- p1, que corresponde a un intervalo de tiempo dT consumido por la parte móvil (11) para desplazarse entre la primera posición predeterminada y una segunda posición predeterminada que está a una distancia de dicha primera posición,
- p2, que corresponde a una velocidad de dicha parte móvil (11) en dicha primera posición,
- p3, que corresponde a una aceleración de dicha parte móvil (11) en dicha primera posición,
- p4, que corresponde a una función F(p1) de dicho parámetro p1,
- p5, que corresponde a una función F(p2) de dicho parámetro p2,
- p6, que corresponde a una función F(p3) de dicho parámetro p3, y
- p7, que corresponde a una función de dos o más de dichos parámetros p1, p2, p3.
5. Método según la reivindicación 4, caracterizado por el hecho de que dicho parámetro p corresponde al tiempo dT consumido por dicha parte móvil (11) para ir de la primera posición predeterminada a la segunda posición, siendo la segunda posición posterior a la primera y estando dicha segunda posición a una distancia de la primera.
6. Método según la reivindicación 1, caracterizado por el hecho de que se realiza una pluralidad de fases para determinar los valores Vi adoptados por dicho parámetro dinámico en sucesivas posiciones predeterminadas adoptadas por la parte móvil (11) durante dicho movimiento.
7. Método según la reivindicación 5, caracterizado por el hecho de que dicho parámetro es el tiempo consumido por la parte móvil (11) para ir de la primera posición, que corresponde al estado en el que está abierta válvula, a una segunda posición, que corresponde o es cercana a un estado en el que está cerrada la válvula.
8. Método según la reivindicación 1, caracterizado por el hecho de que, si dicho valor del parámetro p no satisface dicho criterio de aceptabilidad, es entonces realizada una fase de corrección.
9. Método según la reivindicación 1, caracterizado por el hecho de que, si dicho valor del parámetro p no satisface dicho criterio de aceptabilidad, es entonces realizada una fase de alarma.
10. Método según la reivindicación 8, caracterizado por el hecho de que la fase de corrección comprende una subfase de intervención en el movimiento de la parte móvil (11) de dicho elemento de corte (9).
11. Método según la reivindicación 6, caracterizado por el hecho de que los valores Vi adoptados por dicho parámetro p son comparados con correspondientes criterios de aceptabilidad, y, si los de un número predeterminado de dichos valores no satisfacen sus particulares criterios de aceptabilidad, es realizada una fase de alarma.
12. Método según la reivindicación 6, caracterizado por el hecho de que los valores Vi adoptados por dicho parámetro p son comparados con sus respectivos márgenes de aceptabilidad, y, si los de un número predeterminado de dichos valores no están dentro de sus respectivos márgenes de aceptabilidad, es realizada una fase de corrección.
13. Método según la reivindicación 12, caracterizado por el hecho de que la fase de corrección comprende una subfase de intervención en el movimiento de la parte móvil (11) de dicho elemento de corte (9).
14. Método según la reivindicación 1, caracterizado por el hecho de que dicho criterio de aceptabilidad es predeterminado o bien es calculado en función de uno o varios de los parámetros siguientes:
- pi, que corresponde o es proporcional a la presión en las inmediaciones del tramo de tubo cuando el elemento de corte está en el estado de apertura;
- fl, que corresponde a la velocidad de flujo de fluido a través del tramo de tubo cuando el elemento de corte está en el estado de apertura.
15. Sistema de detención del flujo que circula por un circuito extracorpóreo de fluido (2), comprendiendo dicho sistema:
- al menos un elemento de corte de flujo (9) que actúa en un tramo de tubo deformable (10) que forma parte de dicho circuito, teniendo este elemento de corte al menos una parte móvil (11) que puede ser accionada para alternar entre un estado de apertura, en el cual la misma permite el paso del fluido, y al menos un estado de cierre, en el cual la misma impide el paso del fluido por dicho tramo de tubo;
- un accionador (14) que está en conexión con dicho elemento de cierre (9) para mover al menos dicha parte móvil (11); y
- una unidad de supervisión (15) que actúa en dicho accionador (14);
caracterizado por el hecho de que la unidad de supervisión es capaz de:
a) ocasionar un desplazamiento de la parte móvil (11) del elemento de corte (9) hacia dicho estado de cierre;
b) determinar un valor de al menos un parámetro dinámico asociado al movimiento de dicha parte móvil (11) durante dicho movimiento;
c) verificar que el valor adoptado por dicho parámetro dinámico satisfaga un criterio de aceptabilidad.
16. Sistema según la reivindicación 15, caracterizado por el hecho de que el elemento de corte (9) comprende una parte fija (12) que define, en conjunción con dicha parte móvil, un asiento de alojamiento para dicho tramo de tubo (10), estando la parte móvil (11) destinada para en su desplazamiento hacia el estado de cierre aproximarse a la parte fija para así comprimir progresivamente dicho tramo de tubo (10).
17. Sistema según la reivindicación 15, caracterizado por el hecho de que dicho parámetro dinámico es determinado en relación con una primera posición de la parte móvil que es intermedia entre una posición de reposo adoptada por la parte móvil en el estado de apertura del elemento de corte (9) y una posición de trabajo adoptada por la parte móvil en el estado de cierre del elemento de corte (9).
18. Sistema según la reivindicación 17, caracterizado por el hecho de que dicho parámetro dinámico que es al menos uno está destinado a proporcionar información acerca de un estado de movimiento de dicha parte móvil (11) y es seleccionado de entre los parámetros dinámicos siguientes:
a) p1, que corresponde a un intervalo de tiempo dT consumido por la parte móvil (11) para desplazarse entre la primera posición predeterminada y una segunda posición predeterminada que está a una distancia de dicha primera posición,
b) p2, que corresponde a una velocidad de dicha parte móvil (11) en dicha primera posición,
c) p3, que corresponde a una aceleración de dicha parte móvil (11) en dicha primera posición,
d) p4, que corresponde a una función F(p1) de dicho parámetro p1,
e) p5, que corresponde a una función F(p2) de dicho parámetro p2,
f) p6, que corresponde a una función F(p3) de dicho parámetro p3, y
g) p7, que corresponde a una función de dos o más de dichos parámetros p1, p2, p3.
19. Sistema según la reivindicación 18, caracterizado por el hecho de que dicha unidad de supervisión (15) está destinada a calcular el valor de dicho parámetro p como el intervalo de tiempo dT consumido por dicha parte móvil (11) para ir de la primera posición predeterminada a la segunda posición, siendo la segunda posición posterior a la primera y estando dicha segunda posición a una distancia de la primera.
20. Sistema según la reivindicación 15, caracterizado por el hecho de que dicha unidad de supervisión (15) está diseñada para realizar una pluralidad de fases para determinar los valores Vi adoptados por dicho parámetro dinámico en sucesivas posiciones predeterminadas adoptadas por la parte móvil (11) durante dicho movimiento.
21. Sistema según la reivindicación 19, caracterizado por el hecho de que dicha unidad de supervisión (15) está diseñada para determinar el valor de dicho parámetro como el intervalo de tiempo dT consumido por la parte móvil (11) para pasar de la posición de reposo, que corresponde al estado de apertura del elemento de corte, a la primera posición (20).
22. Sistema según la reivindicación 15, caracterizado por el hecho de que la unidad de supervisión (15) es capaz de activar una posterior fase de corrección y/o alarma si dicho valor del parámetro p no satisface el criterio de aceptabilidad.
23. Sistema según la reivindicación 15, caracterizado por el hecho de que dicho criterio de aceptabilidad es predeterminado.
24. Sistema según la reivindicación 15, caracterizado por el hecho de que dicha unidad de supervisión (15) es capaz de calcular el criterio de aceptabilidad en función de:
- pi, que corresponde o es proporcional a la presión en las inmediaciones del tramo de tubo cuando el elemento de corte está en el estado de apertura;
- fl, que corresponde a la velocidad de flujo de fluido a través del tramo de tubo cuando el elemento de corte está en el estado de apertura.
25. Sistema según la reivindicación 20, caracterizado por el hecho de que dicha unidad de supervisión (15) está diseñada para activar una fase de corrección y/o una fase de alarma si los de un número predeterminado de dichos valores Vi no están dentro de sus respectivos márgenes de aceptabilidad.
26. Sistema según la reivindicación 22 o la reivindicación 24, caracterizado por el hecho de que durante la fase de corrección la unidad de supervisión (15) está diseñada para intervenir en dicho accionador (14) para variar al menos la velocidad de movimiento de la parte móvil (11) de dicho elemento de corte (9).
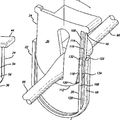
27. Sistema según la reivindicación 17 o según la reivindicación 20, caracterizado por el hecho de que dicha unidad de supervisión (15) comprende:
a) una unidad de control (16), y
b) medios (17) para detectar uno o varios posicionamientos de dicha parte móvil (11) en posiciones sucesivas, y para enviar correspondientes señales a la unidad de control (16), siendo dicha unidad de control capaz de determinar el valor de dicho parámetro dinámico o de dichos parámetros dinámicos a continuación de la recepción de dicha señal o de dichas señales.
28. Sistema según la reivindicación 27, caracterizado por el hecho de que dichos medios detectores (17) comprenden sensores de posición (20, 21) que están en conexión de dicha unidad de control (16).
29. Sistema según la reivindicación 27, caracterizado por el hecho de que la unidad de control (16) comprende al menos un bloque microprocesador (18) o CPU y una memoria (19) conectada a la CPU.
30. Sistema según la reivindicación 15, caracterizado por el hecho de que la unidad de supervisión (15) está diseñada para ejecutar dichas fases en respuesta a una instrucción preprogramada automática.
31. Sistema según la reivindicación 22 o 25, caracterizado por el hecho de que la unidad de supervisión (15) está diseñada para ejecutar dichas fases en respuesta a la detección de una situación de peligro.
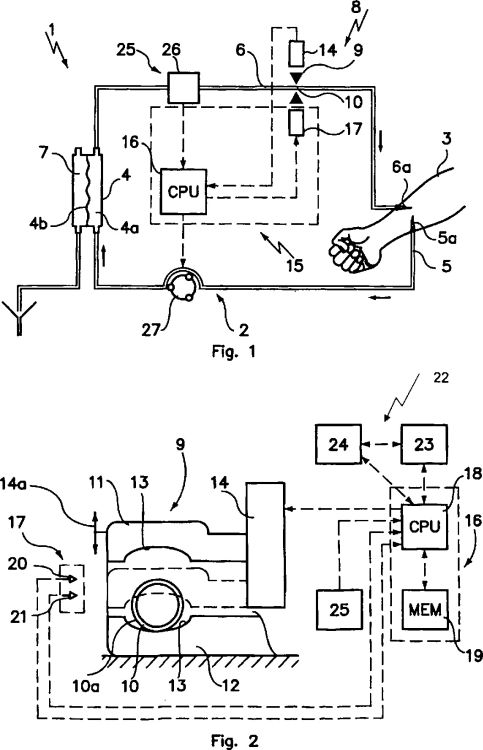
32. Aparato de tratamiento de sangre que comprende:
a) un circuito extracorpóreo equipado con al menos una unidad de tratamiento de la sangre que tiene al menos una primera cámara (4a) y una segunda cámara (4b) que están separadas una de otra por una membrana semipermeable (7), al menos una tubería de toma (5) que es para tomar sangre de un paciente y está conectada a una entrada de dicha primera cámara (4a), y al menos una segunda tubería (6) que es para devolver la sangre al paciente y está en comunicación fluídica con una salida de dicha cámara; y
b) medios (27) para establecer un flujo de fluido a través de dicho circuito extracorpóreo;
estando dicho aparato de tratamiento de sangre caracterizado por el hecho de que el mismo comprende un sistema (8) según cualquiera de las anteriores reivindicaciones 15 a 31.
33. Aparato según la reivindicación 32, caracterizado por el hecho de que comprende medios sensores (25) para detectar parámetros predeterminados para supervisar el correcto funcionamiento de dicho aparato (1), estando dichos sensores (25) diseñados para enviar correspondientes señales a la unidad de supervisión (15) para la determinación de potenciales estados de peligro.
34. Aparato según la reivindicación 32, caracterizado por el hecho de que dichos medios sensores (25) comprenden un detector de burbujas de aire (26) conectado al circuito extracorpóreo (2).
35. Aparato según la reivindicación 33, caracterizado por el hecho de que, tras una determinación de dichas situaciones de peligro, la unidad de supervisión es capaz de enviar instrucciones para el cierre del elemento de corte y para realizar las fases del método de supervisión que se reivindican en unas reivindicaciones 1 a 14.
36. Soporte de registro magnético y/u óptico programado con un programa de soporte lógico informático que comprende instrucciones para hacer un aparato de tratamiento de sangre según las reivindicaciones 32 a 35, donde la unidad de supervisión (15) comprende además una unidad microprocesadora (18) que es capaz de ejecutar las fases del método de supervisión según una de las reivindicaciones 1 a 14.
Patentes similares o relacionadas:
 APARATO DE PINZA AUTOMATICA, del 11 de Junio de 2010, de CAREFUSION 303, INC: Un aparato de pinza para evitar selectivamente flujo de fluido a través de un tubo elástico, que comprende:
una base que tiene una abertura tubular en la cual […]
APARATO DE PINZA AUTOMATICA, del 11 de Junio de 2010, de CAREFUSION 303, INC: Un aparato de pinza para evitar selectivamente flujo de fluido a través de un tubo elástico, que comprende:
una base que tiene una abertura tubular en la cual […]
 Válvula de catéter, del 29 de Julio de 2020, de Profiform AG: Válvula de catéter, en particular, una válvula de catéter de cierre automático para su uso en urología, geriatría, entre otros, que comprende entre otras piezas, […]
Válvula de catéter, del 29 de Julio de 2020, de Profiform AG: Válvula de catéter, en particular, una válvula de catéter de cierre automático para su uso en urología, geriatría, entre otros, que comprende entre otras piezas, […]
Dispositivo para entrega de agente antimicrobiano en un catéter transdérmico, del 1 de Abril de 2020, de ICU MEDICAL, INC.: Un sistema para administrar un agente antimicrobiano en una luz de un catéter transdérmico , comprendiendo dicho sistema un catéter transdérmico […]
Dispositivo de infusión subcutánea para inyectar sustancias medicinales, del 30 de Octubre de 2019, de Baxalta Incorporated: Un dispositivo médico de administración para administrar una sustancia medicinal al cuerpo de un usuario, que comprende: un conector plegable que […]
 Oclusor de flujo libre y almohadilla accionadora de cebado, del 25 de Septiembre de 2019, de ZEVEX, INC.: Conjunto de oclusor en línea que comprende:
un tubo flexible que tiene un orificio pasante;
un cuerpo ;
un oclusor , teniendo el oclusor una sección […]
Oclusor de flujo libre y almohadilla accionadora de cebado, del 25 de Septiembre de 2019, de ZEVEX, INC.: Conjunto de oclusor en línea que comprende:
un tubo flexible que tiene un orificio pasante;
un cuerpo ;
un oclusor , teniendo el oclusor una sección […]
Bomba médica con alojamiento de abrazadera para manguera, abrazadera para manguera así como sistema de ambos, del 8 de Mayo de 2019, de B. BRAUN MELSUNGEN AG: Bomba médica (40; 40'), para transportar un medio, con un alojamiento (42; 42') para una abrazadera para manguera (2; 2') separada de la bomba (40; 40'), dispuesta […]
Pinzas para tubos con interbloqueo, del 8 de Mayo de 2019, de BAXTER INTERNATIONAL INC.: Un conjunto de pinza para tubos que comprende: una primera pinza (10a) para tubos que incluye una porción de sujeción de tubo para sujetar […]
Bomba peristáltica tipo dedo, del 17 de Abril de 2019, de Q-Core Medical Ltd: Una bomba peristáltica tipo dedo que comprende un cuerpo y una carcasa que contiene un conducto ; en la que dicho cuerpo contiene dos o más válvulas tipo […]