Un método y un sistema para facilitar la calibración de una célula robótica programada fuera de línea.
Un método para facilitar la calibración de una célula robótica que incluye uno o más objetos (8;
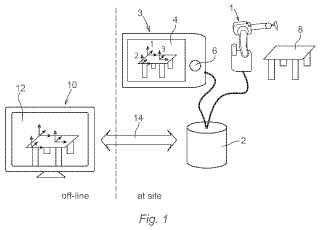
52) y un robot industrial (1,2, 3) que realiza trabajos en conexión con los objetos, en el que la célula robótica es programada por medio de unaherramienta o útil de programación fuera de línea que incluye un componente gráfico (22) para generar gráficos en 2D o 3Dbasados en modelos gráficos de los objetos, caracterizado por que el método comprende:
almacenar para cada uno de los objetos una secuencia de puntos de calibración (54, 56, 58) incluyendo información sobre unorden deseado en el que los puntos de calibración deberían ser visitados durante la calibración,
generar automáticamente una secuencia de imágenes (60, 65, 66) que muestra el orden en el que los puntos de calibraciónhan de ser visitados, cada una de las imágenes incluye una representación gráfica del objeto que ha de ser calibrado y elpunto de calibración en relación al objeto,
transferir la secuencia de imágenes al robot, y
presentar dicha secuencia de imágenes a un operador de robot durante la calibración de la célula robótica de modo que paracada punto de calibración se presente al operador del robot una vista que incluye el punto de calibración actual y el objeto queha de ser calibrado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/057139.
Solicitante: ABB TECHNOLOGY LTD.
Nacionalidad solicitante: Suiza.
Dirección: AFFOLTERNSTRASSE 44 8050 ZURICH SUIZA.
Inventor/es: SVENSSON,TOMMY Y, GUSTAFSSON,MAGNUS K, HAAGE,MATHIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
PDF original: ES-2412393_T3.pdf
Fragmento de la descripción:
Un método y un sistema para facilitar la calibración de una célula robótica programada fuera de línea CAMPO DEL INVENTO
El presente invento se refiere a un método y un sistema para facilitar la calibración de una célula robótica que incluye uno o más objetos y un robot industrial que realiza trabajos en conexión con los objetos, en el que la célula robótica es programada por medio de una herramienta o útil de programación fuera de línea.
El invento se refiere al área de programación fuera de línea y en línea, cuando un usuario ha programado o ajustado un programa de robot en un entorno de 3D o 2D fuera de línea y a continuación desea llevar ese programa a la planta de producción.
TÉCNICA ANTERIOR
Los robots industriales son dispositivos muy flexibles utilizados para una amplia variedad de operaciones en muchas aplicaciones industriales diferentes. Los robots industriales son programados convencionalmente mediante un lenguaje de programación de robot que es muy similar a los lenguajes de programación de ordenador convencionales. Un programa de robot incluye una secuencia de instrucciones de programa en la que cada instrucción le dice a la unidad de robot qué hacer y cómo hacerlo. Los robots son programados para seguir un trayecto que incluye una pluralidad de puntos objetivo o de destino. El programa de robot incluye las posiciones de los puntos objetivo. La programación de los robots es un proceso que consume tiempo y los métodos convencionales de utilizar el robot durante el proceso de programación y enseñanza mantiene ocupado al equipo de producción y retrasa el comienzo de la producción. Con el fin de ahorrar tiempo y hacer más rápido el comienzo de la producción, es muy deseable programar un robot fuera de línea. Convencionalmente, esto es realizado a través de una simulación gráfica por una herramienta de programación fuera de línea. La herramienta de programación contiene un componente gráfico para generar una representación gráfica en 3D del robot y de los objetos en la célula robótica, tales como objetos de trabajo y herramientas, basados en modelos gráficos, por ejemplo modelos CAD, del robot y de los objetos. La herramienta de programación contiene además un medio gráfico para enseñar puntos objetivo y trayectos y grabar las operaciones y movimientos del robot. La simulación gráfica proporciona un método mucho más natural y sencillo para programar y visualizar un robot industrial, sin mantener ocupado al equipo real. Además, el entorno gráfico permite una independencia del lenguaje de programación del robot utilizado por el fabricante del robot. La salida de la simulación es una representación gráfica de lo que el robot debería hacer durante su funcionamiento y el programa de robot real. Cuando se ha completado la simulación y la programación fuera de línea, el programa puede ser transferido al robot real.
Sin embargo, un programa de robot preparado por un sistema de programación fuera de línea no puede ser utilizado directamente para hacer funcionar un robot en una célula robótica real, porque la relación posicional entre el robot y los objetos en el entorno fuera de línea puede desviarse de la relación posicional real entre el robot y los objetos en la célula robótica real. Este es tradicionalmente un problema muy difícil y ha sido un obstáculo para la adopción de la programación fuera de línea en la industria.
Por consiguiente, después de generar un programa de robot basado en modelos gráficos de los objetos, deben determinarse las posiciones de los objetos reales con relación al robot. Un objeto puede ser cualquier tipo de objeto en la célula robótica, tal como una pieza, un puesto de trabajo, una herramienta, un sistema o marco base del robot, o un equipo externo. Normalmente las posiciones objetivo reales en el trayecto programado están relacionadas con un sistema o marco de referencia definido en relación al objeto, lo que significa que calibrar un objeto ajustará las posiciones objetivo relacionadas en relación al sistema común de coordenadas (véase por ejemplo el documento EP1462224 A2) . La calibración de una célula robótica incluye determinar las posiciones del robot y los objetos en la célula robótica en relación a un sistema común de coordenadas. Esto es típicamente realizado utilizando el robot como un dispositivo de medición. El usuario mueve sucesiva e intermitentemente el robot al menos a tres puntos de calibración en el objeto y las posiciones del robot son grabadas para los puntos de calibración. Con el término “mover sucesiva e intermitentemente el robot” se quiere decir que el robot es movido manualmente por el usuario, por ejemplo por medio de una palanca de mando. Las posiciones del robot grabadas son a continuación utilizadas para determinar la relación entre el robot y los objetos reales. Como las relaciones entre el robot y los modelos de los objetos son conocidas, es posible determinar las relaciones entre los modelos y las posiciones reales del objeto. La posición real del objeto puede entonces ser actualizada y por ello toda la posición en el trayecto programado será actualizada ya que la relación entre la posición en el trayecto programado y el objeto es conservada.
Una persona que controla un robot es denominada un operador de robot. En lo sucesivo las palabras usuario y operador de robot son utilizadas de forma sinónima. Cuando hay muchos objetos que han de ser calibrados, el usuario tiene que mover sucesiva e intermitentemente el robot a todos los objetos y por consiguiente a muchos puntos de calibración en los objetos. Además, el orden en el que el robot visita los puntos de calibración es importante para el resultado de la calibración. Típicamente, el usuario debe escribir sobre una hoja de papel todos los objetos que han de ser calibrados, y las posiciones de los puntos de calibración. Esto lleva tiempo y es propenso a errores.
Después de la calibración, puede haber aún desviaciones entre los modelos y los objetos reales en la celda. Antes de aplicar el programa de robot a la producción, el programa de robot ha de ser comprobado y corregido, por ejemplo para evitar colisiones. Esto significa que el programa de robot generado fuera de línea ha de ser ejecutado en el robot. El documento EP1510894 describe un aparato para corregir programas de robot generados fuera de línea. El aparato incluye medios para detener la ejecución del programa de robot cuando se recibe una orden de parada, medios para presentar el siguiente punto objetivo cuya posición ha de ser corregida en la pantalla de presentación al detener la ejecución, medios para mover el robot moviéndole sucesiva e intermitentemente desde la posición en la que la ejecución del programa ha sido detenida, y medios para reflejar la posición actual del robot en el siguiente punto objetivo cuya posición ha de ser corregida, cuando la posición del punto objetivo es corregida. El procedimiento de corrección ha de ser repetido para cada punto objetivo en el trayecto programado, lo que consume tiempo.
OBJETOS Y RESUMEN DEL INVENTO
El objeto del presente invento es proporcionar una herramienta para el operador de robot que facilite la calibración de los objetos en una célula robótica.
De acuerdo con un aspecto del invento, esto objeto es conseguido por el método según ha sido definido en la reivindicación 1.
Tal método comprende: almacenar una secuencia de puntos de calibración para cada uno de los objetos, generar automáticamente una secuencia de imágenes que incluye representaciones gráficas de los objetos que han de ser calibrados y los puntos de calibración en relación a los objetos, transferir la secuencia de imágenes al robot, y presentar dicha secuencia de imágenes a un operador de robot durante la calibración de la célula robótica de modo que para cada punto de calibración se presente al operador del robot una vista que incluye el punto de calibración actual y el objeto que ha de ser calibrado.
Para cada objeto es almacenado en el entorno fuera de línea, un conjunto de puntos de calibración e información predeterminados en un orden deseado en el que los puntos de calibración deberían ser visitados durante la calibración. De acuerdo con el invento, se genera una pluralidad de imágenes que incluyen representaciones gráficas de los objetos que han de ser calibrados y de los puntos de calibración en relación a los objetos. Las imágenes son imágenes virtuales que incluyen objetos gráficos. La secuencia de las imágenes muestra el orden en el que los puntos de calibración han de ser visitados por el robot. Esas imágenes son transferidas al robot y son presentadas al usuario durante la calibración. Los puntos de calibración son escogidos... [Seguir leyendo]
Reivindicaciones:
1. Un método para facilitar la calibración de una célula robótica que incluye uno o más objetos (8; 52) y un robot industrial (1, 2, 3) que realiza trabajos en conexión con los objetos, en el que la célula robótica es programada por medio de una herramienta o útil de programación fuera de línea que incluye un componente gráfico (22) para generar gráficos en 2D o 3D basados en modelos gráficos de los objetos, caracterizado por que el método comprende:
almacenar para cada uno de los objetos una secuencia de puntos de calibración (54, 56, 58) incluyendo información sobre un orden deseado en el que los puntos de calibración deberían ser visitados durante la calibración,
generar automáticamente una secuencia de imágenes (60, 65, 66) que muestra el orden en el que los puntos de calibración han de ser visitados, cada una de las imágenes incluye una representación gráfica del objeto que ha de ser calibrado y el punto de calibración en relación al objeto,
transferir la secuencia de imágenes al robot, y
presentar dicha secuencia de imágenes a un operador de robot durante la calibración de la célula robótica de modo que para cada punto de calibración se presente al operador del robot una vista que incluye el punto de calibración actual y el objeto que ha de ser calibrado.
2. El método según la reivindicación 1, en el que dichas imágenes son generadas por medio de dicho componente gráfico de la herramienta de programación.
3. El método según la reivindicación 1 ó 2, en el que dicha secuencia de puntos de calibración es almacenada con el modelo gráfico del objeto.
4. El método según cualquiera de las reivindicaciones previas, en el que el método comprende:
generar automáticamente un interfaz de usuario paso a paso que muestra las imágenes y guía al usuario a través del proceso de calibración basado en dicha secuencia de puntos de calibración,
transferir la interfaz de usuario al robot, y presentar la interfaz de usuario durante la calibración.
5. El método según cualquiera de las reivindicaciones previas, en el que el método comprende: generar automáticamente al menos un programa de calibración que incluye instrucciones para mover el robot a posiciones situadas en o cerca de los puntos de calibración, basándose en dicha secuencia almacenada de puntos de calibración, transferir el programa de calibración y las imágenes al robot, y ejecutar dicho programa de calibración de modo que para cada punto de calibración, el robot sea movido automáticamente a una posición situada en o cerca del punto de calibración.
6. El método según la reivindicación 5, en el que el robot comprende una unidad de control y una Unidad de Secuencia de Operaciones (TPU) para controlar manualmente el robot y que tiene una pantalla de presentación, y dicho programa de calibración es transferido a la unidad de control y ejecutado por ella y dichas imágenes son presentadas en el dispositivo de presentación de la unidad de Secuencia de Operaciones.
7. El método según la reivindicación 5 ó 6, en el que cada una de dichas imágenes muestra información procedente del programa de calibración con relación al movimiento del robot al siguiente punto de calibración en la secuencia, y cada una de dichas imágenes muestra medios activados por el usuario para iniciar y detener la ejecución del programa de calibración.
8. El método según cualquiera de las reivindicaciones previas, en el que un sistema de referencia es definido en relación a cada uno de los objetos y un trayecto que incluye una pluralidad de puntos objetivo definido en relación a los sistemas de referencia es programado por medio de la herramienta de programación fuera de línea, y el método comprende: almacenar para cada uno de los puntos de calibración la posición del robot cuando el robot está posicionado en el punto de calibración, y determinar para cada objeto la relación posicional entre el sistema de referencia del modelo del objeto y el sistema de referencia del objeto real basado en las posiciones de robot almacenadas para los puntos de calibración.
9. El método según cualquiera de las reivindicaciones previas, en el que cada punto de calibración está provisto con una imagen que muestra el objeto que ha de ser calibrado y el siguiente punto de calibración, al que será movido el robot de acuerdo con la secuencia de puntos de calibración.
10. Un sistema para facilitar la calibración de una célula robótica que incluye uno o más objetos (8; 52) y un robot industrial (1, 2, 3) que realiza trabajos en conexión con los objetos, en el que la célula robótica es programada por medio de una herramienta o útil de programación fuera de línea que incluye un componente gráfico (22) para generar gráficos en 2D o 3D basados en modelos gráficos de los objetos, caracterizado por que el sistema comprende una unidad de ordenador (10) situada en el lugar de programación fuera de línea y configurada para almacenar una secuencia de puntos de calibración (54, 56, 58) incluyendo información sobre un orden deseado en el que los puntos de calibración deberían ser visitados durante la calibración, y para generar una secuencia de imágenes (60, 65, 66) que muestra el orden en el que los puntos de calibración han de ser visitados, cada una de las imágenes incluye una representación gráfica del objeto que ha de ser calibrado y el punto de calibración en relación al objeto, y para transferir las imágenes al robot, y por que el robot esté configurado para presentar dicha secuencia de imágenes a un operador de robot durante la calibración de la célula robótica de modo que para cada punto de calibración se presente al operador del robot una vista que incluye el punto de calibración actual y el objeto que ha de ser calibrado.
11. El sistema según la reivindicación 10, en el que la unidad de ordenador (10) está configurada para generar dichas imágenes por medio de dicho componente gráfico.
12. El sistema según la reivindicación 10 u 11, en el que dicha unidad de ordenador (10) está configurada para almacenar dicha secuencia de puntos de calibración junto con el modelo gráfico del objeto.
13. El sistema según cualquiera de las reivindicaciones 10-12, en el que la unidad de ordenador (10) está configurada para generar al menos un programa de calibración que incluye instrucciones para mover el robot a posiciones situadas en o cerca de los puntos de calibración, basándose en dicha secuencia de puntos de calibración, y para transferir el programa de calibración generado al robot, y el robot está configurado para ejecutar dicho programa de calibración durante la calibración de la célula robótica de modo que para cada punto de calibración el robot es movido automáticamente a una posición en o cerca del punto de calibración.
14. El sistema según la reivindicación 13, en el que el robot comprende una unidad de control (2) y una Unidad de Secuencia de Operaciones (3) para controlar manualmente el robot y que tiene una pantalla de presentación (4) , y dicho programa de calibración es transferido a la unidad de control y ejecutado por la unidad de control y dichas imágenes son presentadas en la pantalla de presentación de la Unidad de Secuencia de Operaciones.
15. El sistema según cualquiera de las reivindicaciones 10-14, en el que un sistema de referencia es definido en relación a cada uno de los objetos y un trayecto que incluye una pluralidad de puntos objetivo definido en relación a los sistemas de referencia es programado por medio de la herramienta de programación fuera de línea también y el robot está configurado para recibir información sobre cuándo está posicionado el robot en el punto de calibración, y para almacenar la posición del robot al recibir esta información, y el robot comprende medios de ordenador (46) para determinar la relación posicional entre el sistema de referencia del modelo del objeto y el sistema de referencia del objeto real basado en las posiciones de robot almacenadas para los puntos de calibración.
16. El sistema según cualquiera de las reivindicaciones 10-15, en el que dicha unidad de ordenador (10) está configurada para generar una interfaz de usuario paso a paso que muestra las imágenes y guía al usuario a través del proceso de calibración basado en dicha secuencia de puntos de calibración, y para transferir la interfaz de usuario al robot, y el robot está configurado para presentar la interfaz de usuario durante la calibración.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]