Método rápido de predicción de la trayectoria vertical para la gestión de tráfico aéreo, y sistema ATM pertinente.
Método implementado por ordenador para la predicción de la trayectoria vertical de aeronaves,
en particular parala gestión del tráfico aéreo, que comprende los siguientes módulos de cálculo de vuelo: despegue; ascenso; crucero;descenso; y aterrizaje, correspondientes a las fases relevantes del vuelo, caracterizado por que:
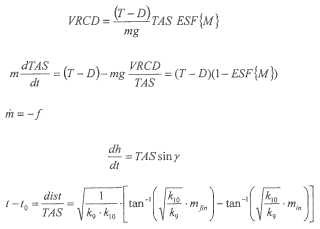
- el cálculo de la trayectoria predicha de la aeronave se efectúa mediante un procesador de ordenador utilizandolas siguientes ecuaciones del modelo de energía total (TEM):
resolviendo dichas ecuaciones para VRCD, TAS, y m; donde VRCD es la velocidad vertical de ascenso odescenso; TAS es la velocidad verdadera, ESF es el factor de reparto de la energía, T es el empuje y D es laresistencia, m es la masa de la aeronave modelada como una masa puntual, {M} es el número de Mach quedepende de la TAS y la temperatura y la altitud, g es la aceleración de la gravedad y f es el consumo decombustible, y - es el ángulo de la trayectoria de vuelo;
- el cálculo de la trayectoria predicha de la aeronave para la fase de crucero, en el que solo varía la masa, serealiza utilizando la siguiente solución analítica a dichas ecuaciones TEM:
Resuelta para la masa mfin al final de la fase de crucero, como función de la masa inicial min, y donde t es eltiempo de vuelo transcurrido, y k9 y k10 son términos constantes predefinidos en función de la aeronaveindividual.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11425301.
Solicitante: SELEX ES S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Piemonte 60 00187 Roma (RM) ITALIA.
Inventor/es: GRASSI,MICHELE, ACCARDO,DOMENICO, MOCCIA,ANTONIO, TANCREDI,URBANO, CAMINITI,LUCIO, FIORILLO,LUIGI, LEARDI,ALBERTO, MARESCA,GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/06 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
- G08G5/00 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
PDF original: ES-2424920_T3.pdf
Fragmento de la descripción:
Método rápido de predicción de la trayectoria vertical para la gestión de tráfico aéreo, y sistema ATM pertinente La presente invención se refiere a un método rápido de predicción de la trayectoria vertical para la gestión de tráfico aéreo (ATM, air traffic management) , y a un sistema ATM pertinente.
En mayor detalle, la presente invención se refiere a un método que es capaz de calcular la trayectoria vertical de una aeronave, integrando de manera adecuada soluciones numéricas y soluciones analíticas para algunas fases de vuelo, de manera rápida y computacionalmente efectiva. La presente invención se refiere además a un sistema ATM que implementa el método de la invención.
Los sistemas ATM están actualmente dando soporte a los vuelos. Sin embargo, el tráfico internacional relevante está aumentando rápidamente [4, 5] y se percibe la necesidad de sistemas ATM que soporten un número de vuelos mucho mayor al que soportan los sistemas operativos actuales.
Por lo tanto, el nivel de automatización de los procesos ATM debe aumentarse para satisfacer este requisito. El número de aeronaves que está previsto vuelen en el espacio aéreo de la siguiente generación requiere un número de controladores humanos no realista [6]. Como consecuencia, los controladores de software sustituirán a los humanos en la función principal, tal como la resolución de conflictos.
Existen varias herramientas en desarrollo para soportar la implementación de controladores de software seguros. De hecho, algunas funciones requieren ejecutar algoritmos complejos con una carga computacional pesada. Además, puesto que se requiere una solución en tiempo real, estos algoritmos deberán ser adecuados para asegurar la emisión de una solución en un tiempo breve. En particular, deben evitarse los bucles incontrolados, puesto que impiden que el sistema cumpla el requisito de determinación temporal.
Una clase importante de herramientas necesarias para la gestión futura del espacio aéreo son los sistemas de resolución de conflictos [4, 5]. Estos requieren estar soportados mediante algoritmos precisos de predicción de trayectorias para generar soluciones realistas para congestiones aéreas detectadas. En los últimos años, se han desarrollado varias herramientas para proporcionar predicción eficaz de trayectorias [7-11].
Los aspectos principales relativos a la realización de una herramienta de predicción de trayectorias adecuada son:
i. La herramienta debe ser capaz de soportar resolución de conflictos en tiempo real, es decir, miles de ejecuciones realizadas en unos pocos segundos;
ii. La herramienta debe basarse en el conocimiento de parámetros incluidos en una base de datos de aeronaves que abarca todo el tráfico gestionado y que se actualiza en cuanto se introduce en el mercado un número no despreciable de nuevos modelos de aeronaves.
Para garantizar que se satisface la condición i) , el motor de cálculo de predicción de trayectorias debe ser reducido de manera que lleve a cabo el mínimo número de cálculos necesarios para generar una solución.
En relación con la condición ii) , la base de datos estándar mundial que se ha seleccionado como referencia en la mayoría de las herramientas ATM que se han desarrollado en los últimos años es BADA™, desarrollada por Boeing™ Europe para EUROCONTROL™. La versión 3.6 incluía todos los parámetros necesarios para integrar velocidades y altitud de aeronaves con una cobertura del 99% de todas las aeronaves en funcionamiento en Europa hasta el año 2006, y la mayor parte de los tipos de aeronaves en funcionamiento en el resto del mundo [11].
Los siguientes artículos están relacionados con el mismo campo de automatización de sistemas ATM:
Slatter y , R. y Zhao, Y., "Trajector y Synthesis for Air Traffic Automation, " AIAA Journal of Guidance, Control, and Dynamics, volumen 20, número 2, marzo-abril de 1997, páginas 232 a 238;
Swenson, H. N., Hoang, T., Engelland, S., Vincent, D., Sanders, T., Sanford, B., Heere, K., "Design and
Operational Evaluation of the Traffic Management Advisor at the Fort Worth Air Route Traffic Control Center, "
1st USA/Europe Air Traffic Management Research and Development Seminar, Saclay, Francia, junio de 1997;
Glover, W. y Lygeros, J., "A Stochastic Hybrid model for Air Traffic Control Simulation" in Hybrid Systems : Computation and Control, ser. LNCS, R. Alur y G. Pappas, Eds., Springer Verlag, 2004, páginas 372 a 386;
Marco Porretta, Marie-Dominique Dupuy, Wolfgang Schuster, Arnab Majumdar y Washington Ochieng,
"Performance Evaluation of a Novel 4D Trajector y Prediction Model for Civil Aircraft", The Journal of Navigation,
volumen 61, 2008, páginas 393 a 420.
Cabe destacar que ninguno de los artículos anteriores informa sobre una implementación en tiempo real de predicción de trayectorias para la automatización de la forma actual del sistema de gestión de tráfico aéreo.
El documento de patente W02007072028 da a conocer un predictor de trayectorias que se implementa en el centro de control. Este predictor tiene en cuenta la masa variable de la aeronave durante el vuelo, cuando predice la velocidad de ascenso.
El objetivo de la presente invención es dar a conocer un método de predicción de la trayectoria vertical para la 5 gestión del tráfico aéreo, que resuelva los problemas y supere las dificultades de la técnica anterior.
Es un objetivo específico de la presente invención un sistema para la gestión del tráfico aéreo que implemente el método objeto de la invención.
Forma parte de la materia de la presente invención un método para la predicción de la trayectoria vertical de aeronaves, en particular para la gestión del tráfico aéreo, que comprende los siguientes módulos de cálculo de vuelo: despegue; ascenso; crucero; descenso; y aterrizaje, correspondientes a las fases relevantes del vuelo, caracterizado por que:
el cálculo de la trayectoria predicha de la aeronave se realiza utilizando un ordenador que utiliza las siguientes ecuaciones del modelo de energía total (TEM, total energy model) :
resuelto para VRCD, TAS, y m; donde VRCD es la velocidad vertical de ascenso o descenso; TAS es la velocidad verdadera, ESF es el factor de reparto de la energía, T es el empuje y D es la resistencia, m es la masa de la aeronave modelada como una masa puntual, {M} es el número de Mach que depende de la TAS y de la temperatura y la altitud, g es la aceleración de la gravedad y f es el consumo de combustible, y y es el ángulo de la trayectoria de vuelo;
el cálculo de la trayectoria predicha de la aeronave para la fase de crucero, en el que la única variable es la masa, se realiza utilizando la siguiente solución analítica a dichas ecuaciones TEM:
Resuelta para la masa mfin al final de la fase de crucero, como función de la masa inicial min, y donde t es el tiempo de vuelo transcurrido, y k9 y k10 son términos constantes predefinidos en función de la aeronave individual.
Preferentemente, según la invención, para la fase de despegue, que se divide en las fases de rodadura en tierra,
transición y ascenso inicial, el cálculo de la trayectoria predicha de la aeronave se lleva a cabo utilizando las siguientes soluciones analíticas a dichas ecuaciones TEM:
que se resuelven para la distancia recorrida en tierra x, donde tTR es el tiempo de la fase de transición, tLO es el tiempo exacto de despegue, xTR, la distancia recorrida en tTR, yTR el ángulo recorrido durante la transición, VLO es la TAS en el despegue, h es la altitud, hTR la altitud en tTR, V es la TAS actual, (Vstall) TO es la velocidad de pérdida de la aeronave con el tren desplegado, W es el peso de la aeronave, y Cpow, red es el coeficiente de reducción de potencia predefinido.
Preferentemente según la invención, para la fase de aterrizaje, el cálculo de la trayectoria predicha de la aeronave lleva a cabo utilizando las siguientes soluciones analíticas:
para la aproximación de planeo, y
para el enderezamiento, donde h es la altitud, h0 es la altitud para el comienzo de la aproximación de planeo, hscreen es la altitud de decisión, VCA, screen es la velocidad del viento calculada (CAS, calculated air speed) a alcanzar en hscreen, VC0 es la velocidad CAS en h0, VC es la velocidad CAS en h; Vflare es la velocidad de CAS durante el
enderezamiento y y es la pendiente de la trayectoria vertical durante el enderezamiento.
Preferentemente, de acuerdo con la invención, las ecuaciones TEM se resuelven:
cada vez que se requiere o se modifica un plan de vuelo, en particular antes de la fase de despegue... [Seguir leyendo]
Reivindicaciones:
1. Método implementado por ordenador para la predicción de la trayectoria vertical de aeronaves, en particular para la gestión del tráfico aéreo, que comprende los siguientes módulos de cálculo de vuelo: despegue; ascenso; crucero; descenso; y aterrizaje, correspondientes a las fases relevantes del vuelo, caracterizado por que:
el cálculo de la trayectoria predicha de la aeronave se efectúa mediante un procesador de ordenador utilizando las siguientes ecuaciones del modelo de energía total (TEM) :
resolviendo dichas ecuaciones para VRCD, TAS, y m; donde VRCD es la velocidad vertical de ascenso o descenso; TAS es la velocidad verdadera, ESF es el factor de reparto de la energía, T es el empuje y D es la resistencia, m es la masa de la aeronave modelada como una masa puntual, {M} es el número de Mach que depende de la TAS y la temperatura y la altitud, g es la aceleración de la gravedad y f es el consumo de combustible, y y es el ángulo de la trayectoria de vuelo;
el cálculo de la trayectoria predicha de la aeronave para la fase de crucero, en el que solo varía la masa, se realiza utilizando la siguiente solución analítica a dichas ecuaciones TEM:
Resuelta para la masa mfin al final de la fase de crucero, como función de la masa inicial min, y donde t es el 20 tiempo de vuelo transcurrido, y k9 y k10 son términos constantes predefinidos en función de la aeronave individual.
2. Método, según la reivindicación 1, caracterizado por que, para la fase de despegue, que se divide en las fases de rodadura en tierra, transición y ascenso inicial, el cálculo de la trayectoria predicha de la aeronave se realiza utilizando las siguientes soluciones analíticas a dichas ecuaciones TEM:
que se resuelven para la distancia recorrida en tierra x, donde tTR es el tiempo de la fase de transición, tLO es el tiempo exacto de despegue, xTR, la distancia recorrida en tTR, yTR el ángulo recorrido durante la transición, VLO es la TAS en el despegue, h es la altitud, hTR la altitud en tTR, V es la TAS actual, (Vstall) TO es la velocidad de pérdida de la aeronave con el tren desplegado, W es el peso de la aeronave, y Cpow, red es el coeficiente de reducción de potencia predefinido.
3. Método, según la reivindicación 1 ó 2, caracterizado por que, para la fase de aterrizaje, el cálculo de la trayectoria predicha de la aeronave se lleva a cabo utilizando las siguientes soluciones analíticas:
para la aproximación de planeo, y
para el enderezamiento, en el que h es la altitud, h0 es la altitud para el comienzo de la aproximación en planeo, hscreen es la altitud de decisión, VCA.screen es la velocidad CAS a alcanzar en hscreen, VC0 es la velocidad CAS en h0, VC es la velocidad CAS en h; Vflare es la velocidad CAS durante el enderezamiento y y Es la pendiente de la trayectoria vertical durante el enderezamiento.
4. Método, según cualquiera de las reivindicaciones 1 a 3, caracterizado por que la integración de las ecuaciones TEM para el cálculo de la trayectoria predicha se realiza utilizando un par de pasos de integración máximos para la velocidad y la altura, con el fin de abordar la carga computacional mínima a un nivel de precisión aceptable, determinándose el par de pasos de integración máximos mediante la realización de las etapas siguientes:
Realizar simulaciones, de acuerdo con dichas ecuaciones TEM, de las fases de ascenso, descenso y crucero para un conjunto uniformemente distribuido de pares de pasos de velocidad y altura que varían desde un par de valores mínimos a un par de valores máximos;
- Asumir el par de valores mínimos como el par de valores más precisos;
- Para cada simulación, que comprende las fases de ascenso, descenso y crucero, realizar gráficos de
contornos que informan del error RMS porcentual de cada par de pasos de velocidad y altura, con respecto a 20 dicho par de valores mínimos;
Elegir el par óptimo de pasos, como el par que representa el punto que tiene un error menor que un valor umbral predefinido y es a la vez el más distante respecto de dicho par de valores mínimos.
5. Método, según cualquiera de las reivindicaciones 1 a 4, caracterizado por que, para todas las fases de vuelo excepto crucero, las ecuaciones TEM son integradas y, para cualquier etapa de integración i-ésima, siendo i un 25 entero positivo:
se comprueba que el estado de funcionamiento calculado está dentro de un PS objetivo predefinido, que se compone de una CAS objetivo y una altitud h objetivo, calculado en base a una envolvente de vuelo predefinida;
si el estado de funcionamiento calculado está fuera de la envolvente de vuelo, llevar a cabo las siguientes etapas:
- sustituir dicho estado de funcionamiento calculado con un estado de funcionamiento corregido que es más próximo a los límites de la envolvente de vuelo y al cual se añade una distancia de margen de seguridad respecto de dichos límites, para evitar que en el cálculo subsiguiente se salga de la envolvente de vuelo;
- pasar a la etapa i+1-ésima de integración comenzando con el estado de funcionamiento corregido, es decir con la CAS y la altitud h corregidas.
6. Método, según cualquiera de las reivindicaciones 1 a 5, caracterizado por que el efecto del viento se tiene en cuenta añadiendo las siguientes ecuaciones a dichas ecuaciones TEM:
y resolviendo para GSLong, que es el componente horizontal de la velocidad de la aeronave respecto al suelo, y para L, que es el ángulo de dirección, donde WSLong es la velocidad horizontal del viento, WSLat es la componente lateral de la velocidad del viento, y beta es el ángulo de marcha.
- cada vez que se requiere o se modifica un plan de vuelo, en particular antes de la fase de despegue de la aeronave,
- cada vez, dentro de un plan de vuelo fijado, que la diferencia entre la posición real de la aeronave, dada mediante detección por radar, y la posición predicha es mayor que un umbral predefinido.
método según las reivindicaciones 1 a 7.
9. Unidad de elaboración electrónica, caracterizada por que comprende medios de código que ejecutan, cuando son utilizados, el método según cualquiera de las reivindicaciones 1 a 7.
10. Programa informático, caracterizado por que comprende medios de código adecuados para ejecutar, cuando se
utilizan en una unidad electrónica de elaboración, el cálculo según el método de cualquiera de las reivindicaciones 1 20 a 7.
11. Medio de memoria tangible, legible por ordenador, que almacena un programa, caracterizado por que el programa es el programa informático según la reivindicación 10.
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
SISTEMA Y METODO DE CONTROL OPERATIVO DE UNA AERONAVE NO TRIPULADA, del 26 de Marzo de 2020, de ARBOREA INTELLBIRD S.L: esumenesumen esumen Sistema y método para el control operativo de una aeronave no tripulada, cuyo fin es imposibilitar el despegue de la aeronave si no se ha pedido […]
Sistema y procedimiento para la gestión de la actividad de aviones mediante la utilización de analítica de vídeo, del 19 de Febrero de 2020, de Airbus Group India Private Limited: Procedimiento para la gestión de la actividad en la zona de operaciones mediante la utilización de analítica de vídeo , que comprende: […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
Sistema de seguimiento para aeronaves no tripuladas, del 4 de Diciembre de 2019, de Airbus Defence and Space GmbH: Sistema para navegación de avión, que comprende: un primer avión con una primera unidad de comunicación que comprende un radar ; […]