MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO.
Método para caracterizar el tráfico rodado.
La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene uno o más carriles.
El método permite determinar cuándo ha pasado un vehículo y parámetros sobre el vehículo que ha pasado tales como la velocidad o el tipo de vehículo, donde estas medidas no se ven afectadas por perturbaciones que actúan sobre los sensores como son las debidas a cambios de temperatura o interferencia entre sensores próximos entre otras.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031199.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: UGARTE SUÁREZ,MARTA, BRIZ PACHECO,SUSANA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S7/527 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Extracción de las señales de eco deseadas.
- G08G1/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que utilizan detectores ópticos o ultrasónicos.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene uno o más carriles. El método permite determinar cuándo ha pasado un vehículo y parámetros sobre el vehículo que ha pasado tales como la velocidad o el tipo de vehículo, donde estas medidas no se ven afectadas por perturbaciones que actúan sobre los sensores como son las debidas a cambios de temperatura o interferencia entre sensores próximos, entre otras.
Para poder llevar a cabo estas medidas, el dispositivo según un ejemplo de realización que puede llevar a cabo este método, dispone de tantos pares de módulos de medida como carriles a caracterizar y ha sido desarrollado preferentemente para ser implementado sobre un puente, un paso elevado o en cualquier plataforma elevada que se pueda disponer sobre la vía. De esta forma el sistema puede instalarse y desinstalarse sencillamente sin necesidad de interrumpir el tráfico. La portabilidad, bajo coste y la facilidad de uso hacen de este sistema una herramienta ideal para la monitorización puntual de tramos de vía, orientada a la gestión eficaz del tráfico o a estudios medioambientales, aunque el sistema puede aplicarse también a estudios en periodos de tiempo prolongados.
ANTECEDENTES DE LA INVENCIÓN
Dentro de la variedad de técnicas que se pueden emplear para el recuento de vehículos, las empleadas con más frecuencia son las que utilizan sensores situados sobre el pavimento. Pueden citarse como ejemplos las mangueras neumáticas, los lazos inductivos, sensores piezoeléctricos, sensores basados en cables de fibra óptica, etc.
Estos sistemas presentan varios inconvenientes, entre ellos la dificultad que comporta su instalación (como es el caso de los lazos inductivos que han de ser instalados bajo el pavimento) , la seguridad del personal que realiza la instalación o la necesidad de interrumpir el tráfico para la instalación en el caso de las mangueras, los sensores piezoeléctricos y los cables de fibra óptica.
Otro de sus inconvenientes es el deterioro que sufren estos dispositivos por el paso de los vehículos. La eficacia de estos sistemas puede depender también de las características de la vía (varios carriles) y de las condiciones meteorológicas adversas.
Una primera alternativa que evita la instalación directamente sobre la vía o bajo la superficie de la vía consiste en hacer uso de técnicas no intrusivas. Las técnicas no intrusivas que se pueden utilizar en el recuento de vehículos son muy diversas entre las cuales se encuentran las que hacen uso de sensores de infrarrojos (IR) , sensores magnéticos, sensores acústicos, vídeo, radar, ultrasonidos, etc.
A pesar de que la técnica basada en el análisis de las imágenes registradas en vídeo proporciona gran cantidad de datos (número, categoría y velocidad de los vehículos) y es fácil de implementar, se ha encontrado que hay muchos factores que afectan al rendimiento de estos sistemas: sombras estacionarias y móviles, sol directo, transiciones luz-oscuridad, errores en el funcionamiento del software etc.
Respecto de los sistemas acústicos, éstos presentan problemas en la detección de vehículos en reposo y en situaciones de gran densidad de tráfico. También el radar se emplea habitualmente pero presenta el inconveniente de su alto coste y de requerir calibraciones frecuentes, también costosas.
Existen también dispositivos basados en la utilización de dos sensores ultrasónicos sintonizados a dos frecuencias distintas y situados en sendos soportes elevados. Los sensores detectan el paso de vehículos y hacen una clasificación de estos según su perfil. Este dispositivo está diseñado para detectar y clasificar los vehículos que acceden a garajes y entradas a edificios.
Si bien este tipo de dispositivos son apropiados para las condiciones de baja velocidad y parámetros bien preestablecidos en el momento del montaje, no son adecuados en situaciones en las que la velocidad de los vehículos es elevada (vías rápidas) ya que no es posible dibujar el perfil del vehículo con precisión, la presencia de perturbaciones por cambios de temperatura, influencia de altos niveles de ruido y las interferencias entre sensores próximos hacen que no sea apropiado para este tipo de aplicación tan exigente.
La presente invención establece un método que hace uso de sensores de distancia ultrasónicos de tal modo que, aunque los sensores se vean afectados por perturbaciones tales como las citadas, dicho método permite discriminar cuándo ha pasado un vehículo, qué velocidad lleva y algunos parámetros que caracterizan su tipología.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención comprende un método que permite ser llevado a cabo mediante un sistema instalable por ejemplo sobre un pórtico de los que se sitúan sobre la vía de tal modo que su instalación es sencilla y no implica interrumpir el tráfico durante la instalación o desinstalación.
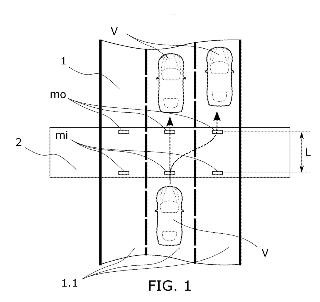
El método para caracterizar el tráfico rodado según la invención es aplicable al tráfico que discurre a lo largo de una vía de circulación de uno o más carriles y comprende las siguientes etapas: ! proveer de un primer módulo sensor de distancia ultrasónico y de un segundo módulo sensor de distancia ultrasónico sobre un mismo carril de la vía de circulación, distanciados en altura de la vía, donde el segundo módulo sensor de distancia ultrasónico se encuentra separado una distancia aguas abajo del primer módulo sensor de distancia ultrasónico; y ambos, están orientados de tal modo que miden la distancia hacia la vía, La pareja de sensores se encuentra situada sobre un carril de la vía de circulación, ambos sensores orientados hacia la superficie por donde discurren los vehículos de modo que cada uno de ellos lleva a cabo una lectura independiente. Si hay más de un carril, cada carril puede disponer de una pareja de sensores. Los sensores de distancia ultrasónicos ofrecen un alto grado de sensibilidad a perturbaciones exteriores tales como variaciones de temperatura, ruido de fondo por el tráfico, ruido por la presencia de los otros sensores; y otros. El resto de las etapas está concebido para que los resultados derivados de su lectura sean fiables a pesar de la presencia de este ruido en la señal de lectura. La presencia de dos sensores permite asegurar que el paso de un vehículo se detecta primero en un módulo sensor y luego en el otro en un orden conocido. Este orden permite establecer la búsqueda de patrones en la señal de uno y otro módulo sensor que determinan el paso de un vehículo.
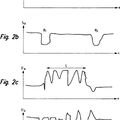
! establecer un periodo de tiempo de medida T, ! llevar a cabo una lectura de la señal smi del primer módulo sensor de distancia ultrasónico y una lectura de la señal smo del segundo módulo sensor de distancia ultrasónico durante el mismo intervalo de tiempo T, El tiempo de medida T es un periodo que en la práctica es largo ya que corresponde por ejemplo al tiempo que se va a estudiar el tráfico en la vía. En este periodo de tiempo T se registra la lectura que provee el primer y el segundo módulo sensor. Esta señal puede ser una señal continua aunque en el ejemplo preferido de realización la lectura se lleva a cabo mediante un muestreo temporal que da lugar a una función discreta. El resultado de esta lectura es la definición de dos funciones definidas en un intervalo de tiempo T, una señal correspondiente al primer módulo y otra señal correspondiente al segundo módulo. Cuando un vehículo pasa por debajo de la pareja de sensores, el primer sensor será el primero que registre una variación de la señal. Si no hay vehículo la señal es el valor de la distancia a la vía y si hay vehículo la distancia es menor ya que se reduce la altura hasta la posición del módulo sensor. Si el vehículo que pasa por debajo no cambia de carril, un cierto tiempo más tarde será también registrado por el segundo módulo. En la práctica, la señal muestra múltiples fluctuaciones. El método según la presente invención permite discernir entre fluctuaciones debidas al ruido y fluctuaciones debidas al paso de un vehículo. Una y otra señal presentarán un pico de variación de la distancia. La distancia disminuye ya que la distancia desde la altura a la que el módulo sensor está instalado hasta el suelo es mayor que la distancia desde el mismo punto de referencia a la superficie superior del vehículo. Ambas señales, tal y como se ha comentado, debido también a las condiciones de ruido (algunas de estas fuentes ya han sido citadas) muestran...
Reivindicaciones:
1. Método para caracterizar el tráfico rodado a lo largo de una vía de cir
culación de uno o más carriles que comprende las siguientes etapas:
! proveer de un primer módulo (mi) sensor de distancia ultrasónico y de un segundo módulo (mo) sensor de distancia ultrasónico sobre un mismo carril (1.1) de la vía (1) de circulación, distanciados en altura de la vía (1) , donde el segundo módulo (mo) sensor de distancia ultrasónico se encuentra separado una distancia (L) aguas abajo del primer módulo (mi) sensor de distancia ultrasónico; y ambos (mi, mo) , están orientados de tal modo que miden la distancia hacia la vía (1) , ! establecer un periodo de tiempo de medida T, ! llevar a cabo una lectura de la señal smi del primer módulo (mi) sensor de distancia ultrasónico y una lectura de la señal smo del segundo módulo (mi) sensor de distancia ultrasónico durante el mismo intervalo de tiempo T, ! establecer un valor medio de referencia smimed para la señal smi del primer módulo (mi) sensor de distancia ultrasónico, ! establecer un valor medio de referencia smomed para la señal smo del segundo módulo (mo) sensor de distancia ultrasónico, ! establecer un primer valor de tolerancia εi, ! determinar el conjunto de extremos locales, máximos o mínimos, mim con m=1..M, que superan en valor absoluto el valor de tolerancia εi en la señal smi respecto del valor medio de referencia smimed, ! establecer un segundo valor de tolerancia εo, ! establecer un periodo de tiempo máximo de rastreo Tras para la segunda señal smo, ! para cada extremo local mim con m=1…M determinar el conjunto de extremos locales, máximos o mínimos, mon con n=1…N, que superan el valor de tolerancia εo en la señal smo, y que se localizan en el intervalo de tiempo Tras que se extiende a partir del instante de tiempo donde se localiza el extremo local mim; y, donde se considera que el extremo local mim en la señal smi corresponde al paso de un vehículo (V) si existe correlación entre el pico de la función asociado a dicho extremo con al menos un pico asociado al extremo mon del conjunto de extremos locales mon con n=1…N de la señal smo determinados en el intervalo de tiempo de rastreo Tras.
2. Método según la reivindicación 1 caracterizado porque:
! se establece un valor de confianza εc en el intervalo (0, 1], ! se define la anchura del pico de la función que corresponde al extremo local mim en la señal smi, ! se define la anchura del pico de la función que corresponde al extremo mon de la señal smo; ! se evalúa numéricamente la correlación estadística entre ambos picos y si este valor numérico es mayor que εc entonces se considera existe correlación.
3. Método según la reivindicación 1 caracterizado porque la lectura de la señal smi y smo es una lectura discretizada en el tiempo dando lugar a dos vectores smik y smok.
4. Método según la reivindicación 2 y 3 caracterizado porque la correlación se lleva a cabo si el número de muestras para cada pico es al menos de 6.
5. Método según cualquiera de las reivindicaciones 1 a 4 aplicable a una vía (1) que dispone de una pluralidad de carriles (1.1) caracterizado porque adicionalmente se provee de uno o más pares de módulos (mi, mo) sensores de distancia ultrasónica, en donde: ! para cada pareja (mij, moj) de módulos, j=1..J con J el número total de parejas de módulos, hay un primer módulo (mij) sensor de distancia ultrasónico y un segundo módulo (moj) sensor de distancia ultrasónico sobre un mismo carril (1.1) de la vía (1) de circulación, distanciados en altura de la vía, donde el segundo módulo (moj) sensor de distancia ultrasónico se encuentra separado una distancia (Lj) aguas abajo del primer módulo (mij) sensor de distancia ultrasónico; y, ! donde los carriles (1.1) que contienen parejas (mij, moj) de módulos sensores de distancia ultrasónica son adyacentes.
6. Método según la reivindicación 2 y 5 caracterizado porque, dado el valor de confianza εc, la correlación mayor que εc entre el extremo local mim en la señal smi y el extremo local mon de la señal smo en el intervalo de tiempo de rastreo Tras se busca para las señales obtenidas en cada una de las parejas (mij, moj) de módulos, j=1..J, determinando el número de vehículos (V) que pasan por la vía (1) como al menos el número de correlaciones encontradas que verifican ser mayores que el valor de confianza εc.
7. Método según la reivindicación 6 caracterizado porque, dado un extremo local mim en la señal smi de un carril que no verifica el tener una correlación mayor que εc con ningún extremo local mon de la señal smo en el intervalo de tiempo de rastreo Tras del mismo carril (1.1) es comparada con los extremos locales mon de las señales de los carriles (1.1) adyacentes también en el intervalo de tiempo de rastreo Tras, de tal modo que si existe correlación con alguno de tales extremos se considera que ha pasado un vehículo (V) y éste ha cambiado de carril (1.1) .
8. Método según la reivindicación 7 caracterizado porque el número total de vehículos (V) que pasan por la vía (1) se determina como el número de vehículos (V) encontrados que no cambian de carril (1.1) más el número de vehículos (V) encontrados que cambian de carril (V) .
9. Método según cualquiera de las reivindicaciones anteriores caracterizado porque para un vehículo (V) detectado como que ha pasado por la vía (1) , se determina su velocidad como la distancia entre el primer módulo (mi) sensor el segundo módulo (mo) sensor que lo han detectado dividido por el tiempo entre picos.
10. Método según cualquiera de las reivindicaciones 1 a 8 caracterizado porque el valor medio de referencia en la señal de entrada smimed el valor medio de referencia en la señal de salida smomed o ambos se establecen a partir de la medida real entre la vía (1) y el módulo (mi, mo) sensor correspondiente.
11. Método según cualquiera de las reivindicaciones 1 a 8 caracterizado porque el valor medio de referencia en la señal de entrada smimed el valor medio de referencia en la señal de salida smomed o ambos se establecen a partir de la media de las señales obtenidas en cada módulo (mi, mo) sensor durante un periodo de tiempo en el que no circula ningún vehículo.
12. Método según cualquiera de las reivindicaciones 1 a 8 caracterizado porque para un vehículo (V) detectado como que ha pasado por la vía (1) , se lleva a cabo una clasificación por grupos según intervalos de la media de la altura del pico asociado a dicho vehículo (V) para agrupar según alturas de vehículo.
13. Método según la reivindicación 12 caracterizado porque para cada grupo, se establece una subclasificación según una medida de la dispersión estadística para agrupar según la forma de los vehículos.
14. Sistema que comprende: una o más parejas de módulos sensores de distancia ultrasónico y una unidad de proceso adaptado para llevar a cabo cualquiera de los métodos según las reivindicaciones 1 a 13.
15. Un programa de ordenador adaptado para llevar a cabo cualquiera de los métodos según las reivindicaciones 1 a 13.
OFICINA ESPAÑOLA DE PATENTES Y MARCAS
Nº solicitud: 201031199
ESPAÑA
Fecha de presentación de la solicitud: 02.08.2010
Fecha de prioridad:
INFORME SOBRE EL ESTADO DE LA TECNICA
51 Int. Cl. : G08G1/04 (2006.01) G01S7/527 (2006.01)
DOCUMENTOS RELEVANTES
Categoría 56 Documentos citados Reivindicaciones afectadas Y US 2004059503 A1 (GODDERT PETERS) 15.03.2004, figuras 1-3; párrafos 0008-0009, 0013-0017, 0030-0032. 1-15 Y ES 2154023 T3 (DIAMONG CONSULTING SERVICES LIMITED) 16.03.2001, figuras 3-11; páginas 2-13. 1-15 A ES 2228712 T3 (REINHARD ZACHMANN) 16.04.2005, todo el documento. 1-15 A ES 2235104 T3 (KAPSCH TRAFFICCOM AG.) 01.07.2005, todo el documento. 1-15 A FR 2880722 A1 (PEUGEUT CITROEN AUTOMOBILES) 14.07.2006, página 5, líne.15. página 13; figura 2. 1-15 A JP 6274787 A (FUJI ELECTRIC CO LTD) 30.09.1994, figuras & Resumen de la base de datos WPI. Recuperado de EPOQUE. 1-15 A US 5173692 A1 (AI COMPUTER SERVICES) 22.12.1992, columna 5, línea 4 - columna 8, línea 28. 1-15 A US 5764163 A1 (ELECTRONICS AND SPACE CORP.) 09.06.1998, figuras 3, 11; columna 3, líne.
50. columna 15, línea 23. 1-15 A US 5821879 A1 (PACIFIC SIERRA RESEARCH CORP.) 16.10.1998, figura 1; columna 1, líne.
36. columna 2, línea 16; .columna 3, línea 3 - columna 8, línea 55. 1-15 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado • para todas las reivindicaciones • para las reivindicaciones nº : Fecha de realización del informe 13.03.2012 Examinador G. Foncillas Garrido Página 1/4
INFORME DEL ESTADO DE LA TÉCNICA
Nº de solicitud: 201031199
Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) G08G, G01S Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC
Informe del Estado de la Técnica Página 2/4
OPINIÓN ESCRITA
Nº de solicitud: 201031199
Fecha de Realización de la Opinión Escrita: 13.03.2012
Declaración
Novedad (Art. 6.1 LP 11/1986) Reivindicaciones 1-15 Reivindicaciones SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones Reivindicaciones 1-15 SI NOSe considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) .
Base de la Opinión.
La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica.
Informe del Estado de la Técnica Página 3/4
OPINIÓN ESCRITA
Nº de solicitud: 201031199
1. Documentos considerados.
A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión.
Documento Número Publicación o Identificación Fecha Publicación D01 US 2004059503 A1 (GODDERT PETERS) 15.03.2004 D02 ES 2154023 T3 (DIAMONG CONSULTING LIMITED) SERVICES 16.03.20012. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración Reivindicación 1 El documento más próximo al objeto de la invención es D01, dicho documento (Figuras 1-3; Párrafos 0008-0009; 00130017; 0030-0032) presenta un sistema de control de tráfico rodado a lo largo de una vía de circulación, en concreto de un túnel con dos carriles. El sistema comprende diferentes sensores ultrasónicos distribuidos a lo largo del túnel distanciados en altura de la via, donde cada sensor se encuentra separado una distancia aguas abajo del sensor anterior. Bajo dichos sensores, se establece el seguimiento de cada vehículo, pudiendo determinar la velocidad de cada uno de ellos. La diferencia del objeto de la solicitud respecto a D01, se establece respecto al análisis de las señales obtenidas por los sensores. En el Documento D02, se establece un sistema de análisis y comparación de señales obtenidas bajos sensores, en un vía de circulación. Se considera de conocimiento común la utilización de valores medios, coeficientes o tolerancias ante posibles errores en la toma de valores de una señal, es decir, el proceso realizado en la obtención de la señal y en la comparación de la misma, no presenta actividad inventiva. Por tanto, dicha reivindicación es nueva (Artículo 6 LP) pero carece de actividad inventiva (Artículo 8 LP) . Reivindicacione.
2. 4 En base a lo indicado, dichas reivindicaciones son nuevas (Artículo 6 LP) pero carecen de actividad inventiva (Artículo 8 LP) . Reivindicacione.
5. 15 En dichas reivindicaciones se establece la solución técnica al problema de cómo identificar vehículos que cambian de carril antes de pasar por el siguiente sensor. La solución se presenta bajo comparación de la señal obtenida en el segundo sensor, con las señales realizadas por los sensores anteriores. Se considera que un experto, llegaría de manera evidente tanto a dicho planteamiento, como a la realización del mismo. Se debe considerar que el tratamiento de señales obtenidas por un sensor es un aspecto sobradamente conocido por el experto en la materia. Por tanto, dichas reivindicaciones son nuevas (Artículo 6 LP) pero carecen de actividad inventiva (Artículo 8 LP) .
Informe del Estado de la Técnica Página 4/4
Patentes similares o relacionadas:
Procedimiento y dispositivo para determinar estado de terminal, y terminal, del 14 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de control de una pantalla de un terminal, que comprende: transmitir (S101, S201), por un generador acústico de conducción ósea, una señal de […]
 Sensor ultrasónico con varias salidas de conmutación, del 30 de Abril de 2014, de PEPPERL + FUCHS GMBH: Sensor ultrasónico con una unidad de procesamiento electrónica y con una unidad de radiación y recepción acústica que emite de manera cíclica […]
Sensor ultrasónico con varias salidas de conmutación, del 30 de Abril de 2014, de PEPPERL + FUCHS GMBH: Sensor ultrasónico con una unidad de procesamiento electrónica y con una unidad de radiación y recepción acústica que emite de manera cíclica […]
Sensor de distancia y método para deteminar una distancia, del 30 de Marzo de 2012, de ROBERT BOSCH GMBH: Sensor de distancia con un emisor y un receptor de ultrasonidos para la emisión de pulsos de ultrasonido y para la recepción de pulsos de ultrasonido reflejados […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
PROCEDIMIENTO PARA LA MEDICION DE LA DISTANCIA Y REALIZACION DEL PROCEDIMIENTO., del 16 de Junio de 2003, de ROBERT BOSCH GMBH: Procedimiento para la medición de la distancia, con preferencia en automóviles, con impulsos de ultrasonido, donde una señal es irradiada con una forma […]
MEJORAS INTRODUCIDAS EN LA MEDICION DE DISTANCIAS POR ECO DE IMPULSOS., del 16 de Febrero de 2001, de CROMA DEVELOPMENTS LIMITED: LA INVENCION SE REFIERE A LA MEDICION DE DISTANCIA POR ECO DE IMPULSOS Y EN PARTICULAR A UN METODO Y UN APARATO PARA CALCULAR TAL DISTANCIA […]
PROCEDIMIENTO PARA LA DETECCION DE OBSTACULOS MEDIANTE ULTRASONIDOS., del 1 de Octubre de 1999, de MAYSER GMBH & CO.: PARA DETECTAR OBSTACULOS ES CONOCIDA LA EMISION DE IMPULSOS DE ULTRASONIDOS PERIODICAMENTE Y LA DEDUCCION DE LA POSICION DE LOS OBSTACULOS […]
 PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]