UN MÉTODO Y UN DISPOSITIVO PARA EFECTUAR EL CENTRADO AUTOMÁTICO DE UNA PIEZA DE TRABAJO EN UNA SUPERFICIE ROTATORIA.
Un método para efectuar el centrado automático de una pieza de trabajo anular (2) en una superficie rotatoria (1) que tiene un centro de giro (O),
que incorpora las siguientes etapas: a) situar arbitrariamente la pieza de trabajo (2) sobre la superficie (1) que gira lentamente, b) aplicar un soporte para la pieza de trabajo (2) por medio de un primer miembro de contacto (6; 13) y un segundo miembro de contacto (7; 14) separado del primer miembro de contacto, y haciendo contactar individualmente ambos miembros de contacto con la pieza de trabajo y siendo desplazables de modo sincrónico de manera alternativa guiada hacia y lejos del centro de giro (O) de la superficie rotatoria (1), c) hacer que se retraigan gradualmente dichos miembros de contacto primero y segundo (6, 7; 13, 14) lejos del centro de giro (O) de la superficie rotatoria (1) hasta que la pieza de trabajo (2) no esté afectada por los miembros de contacto (6, 7; 13, 14) durante una revolución de la superficie rotatoria (1), por lo que la pieza de trabajo (2) ha sido centrada y el centro (A) de la pieza de trabajo (2) coincide con el centro de giro (O) de la superficie rotatoria (1), d) disponer, al menos en uno de dichos miembros de contacto separados (6, 7; 13, 14), unos medios (8; 15, 16) para contrarrestar una fuerza de rozamiento que actúa sobre la pieza de trabajo (2) en esta posición, fuerza de rozamiento que, de otro modo, daría como resultado una componente de fuerza que actuaría sobre la pieza de trabajo (2) para desplazarla radialmente hacia fuera desde el centro (O) de la superficie rotatoria (1), caracterizado porque al menos uno de dichos miembros de contacto (6, 7; 13, 14) está provisto de, o diseñado como, una rueda accionada de manera rotatoria (8, 15), un disco accionado de manera rotatoria o una correa accionada (16) como los medios para contrarrestar la fuerza de rozamiento entre al menos uno de dichos miembros de contacto (7, 13, 14) y la pieza de trabajo (2)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07024586.
Solicitante: AKTIEBOLAGET SKF.
Nacionalidad solicitante: Suecia.
Dirección: SKF GROUP HEADQUARTERS INNOVATION & PATENTS 415 50 GOTEBORG SUECIA.
Inventor/es: CALAS,PETER, BASTEDT,HAKAN, HOGNAS,STEFAN, KAMINSKI,JACEK.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Diciembre de 2007.
Fecha Concesión Europea: 14 de Julio de 2010.
Clasificación PCT:
- B23Q3/152 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 3/00 Dispositivos que permiten mantener, soportar o posicionar las piezas o las herramientas, pudiendo normalmente ser desmontados estos dispositivos de la máquina (mesas de trabajo u otras piezas, p. ej. platos, que no incorporan de forma habitual los medios para sujetar la pieza B23Q 1/00; control automático de la posición B23Q 15/00; cabezas portaherramientas rotativas para máquinas de tornear B23B 3/24, B23B 3/26; porta-herramientas sin accionamiento B23B 29/00; características generales de las torretas B23B 29/24; herramientas o útiles de banco para fijar, unir, desenganchar o mantener B25B). › Dispositivos rotativos.
- B23Q3/18 B23Q 3/00 […] › para posicionarla solamente.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Campo técnico de la invención
La presente invención se refiere a un método para efectuar el centrado automático de una pieza de trabajo anular en una superficie rotatoria, y asimismo a un dispositivo para poner en práctica dicho método.
Antecedentes de la invención
Cuando una pieza de trabajo anular se ha de mecanizar en una máquina de tratamiento mecánico, la pieza de trabajo se aprieta usualmente sobre un plato magnético rotatorio en forma de disco. Los medios mecánicos, comúnmente robots, utilizados para alimentar las piezas de trabajo sobre el plato tienen por lo común una precisión más bien baja, por lo que la pieza de trabajo es colocada a menudo en una posición en la que su centro no coincide con el centro de giro del plato magnético.
Para obtener una mejor coincidencia entre el centro del plato y la pieza de trabajo anular, cuando la misma está situada sobre dicho plato, es posible utilizar, por supuesto, robots de alta precisión, con sistemas de detección y posicionamiento complicados, lo que significa, no obstante, un equipo muy caro.
Además, las piezas elementales anulares rara vez son perfectamente redondas, sino más o menos ovaladas, lo que hace difícil asimismo tener los miembros de anillo situados de tal modo que se puedan mecanizar fácilmente cuando están fijados sobre el plato magnético rotatorio, incluso cuando se utilizan miembros de alimentación de alta precisión.
El documento JP 10–043985 describe un método de centrado que incorpora un plato magnético rotatorio con una pieza de trabajo circular situada sobre el mismo, y con partes de accionamiento dispuestas para moverse hacia el centro del plato. Los instrumentos de medición se mueven simultáneamente hasta una superficie de referencia de medición del centrado y envían una señal cuando el valor medido se sitúa dentro de un intervalo prescrito, con lo cual las partes de accionamiento se devuelven a su posición prescrita. Durante este tiempo, los instrumentos de medición siguen midiendo y cuando el valor numérico no cambia, se pone en marcha un proceso de rectificado. Este método se denomina “automático”, pero utiliza de este modo instrumentos de medición para controlar y supervisar el centrado.
El documento DE 10 2004 023789 A1 describe un método para centrar una pieza de trabajo según el preámbulo de la reivindicación 1, en el que una superficie se hace girar alrededor de un centro, unos medios de empuje están dispuestos para ser desplazables de manera alternativa en direcciones que se cruzan con el centro, estando provistos dichos medios de empuje de dos dedos separados con ruedas giratorias para contactar juntas con la superficie envolvente exterior de una pieza de trabajo anular para soportar dicha pieza empujando alternativamente la misma hacia y más allá del centro de giro de la superficie rotatoria en movimiento de avance de dichos dedos, y para ser desplazada gradualmente hacia fuera en movimiento de retorno de los medios de empuje.
Cuando la pieza de trabajo, incluso si es perfectamente redonda, es empujada más allá del centro de giro, comenzará a desplazarse más o más hacia fuera, lo que hace imposible el centrado en la mayoría de las ocasiones, ya que existen fuerzas de rozamiento que tienden a desplazar hacia fuera la pieza de trabajo, incluso si se ha reducido el rozamiento entre los medios de empuje y la pieza de trabajo, disponiendo ruedas soportadas a rotación en los extremos de los miembros de empuje.
El objetivo de la presente invención es proponer un método y un dispositivo, sin los inconvenientes anteriores para efectuar el centrado automático de una pieza de trabajo anular en una superficie rotatoria que tiene un centro de giro, y asimismo para impedir que la pieza de trabajo sea empujada involuntariamente hacia el borde exterior de la superficie rotatoria debido al rozamiento entre dicha pieza y un miembro utilizado para aplicar la fuerza sobre la misma, y esto se efectúa mediante el método de la reivindicación 1.
En lo sucesivo, la invención se describirá con más detalle haciendo referencia a las realizaciones mostradas esquemáticamente en los dibujos que se acompañan.
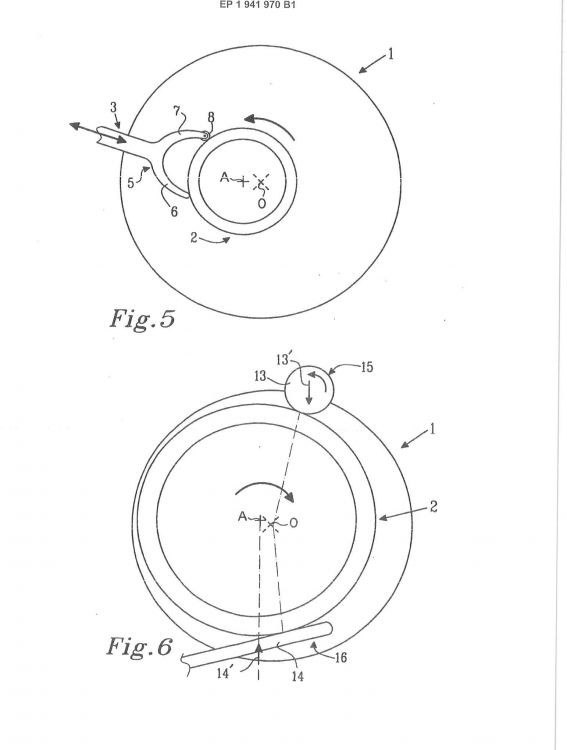
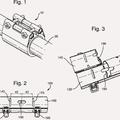
La figura 1 muestra en una vista esquemática desde arriba, partes de un dispositivo según la invención durante una fase inicial de centrado automático de un objeto anular en una superficie rotatoria, la figura 2 es una vista correspondiente durante una segunda fase de centrado automático del objeto anular, la figura 3 es una vista correspondiente durante una tercera fase de centrado automático del objeto anular, la figura 4 es una vista correspondiente después de terminar el centrado automático, estando centrado con precisión el objeto anular alrededor del centro de giro de la superficie rotatoria, y la figura 5 es una vista ligeramente más detallada desde arriba del dispositivo según la invención durante el centrado automático. La figura 6 muestra en una vista esquemática desde arriba, partes de un dispositivo alternante según la invención durante una fase inicial de centrado automático de un objeto anular en una superficie rotatoria.
La figura 1 muestra esquemáticamente una superficie rotatoria 1, que está dispuesta para girar lentamente alrededor de su centro de giro O. Dicha superficie rotatoria 1 es, preferentemente, un plato magnético de cualquier tipo disponible, pero es posible asimismo usar otros tipos de equipo de fijación al plato para un torneado axial. Se sitúa de manera aleatoria sobre dicho plato un objeto anular o una pieza de trabajo anular 2, que tiene un centro geométrico A que, debido al posicionamiento arbitrario del objeto, está desplazado muy a menudo respecto al centro de giro O de la superficie rotatoria 1. Durante el procedimiento de centrado automático, la fuerza magnética se mantiene a bajo nivel, permitiendo por ello que la pieza de trabajo 2 sea desplazable sobre el plato, cuando está influida por fuerzas que actúan sustancialmente en paralelo al plano de la superficie rotatoria 1.
Para efectuar el centrado de la pieza de trabajo 2, se ha previsto un dispositivo 3, que está dispuesto para ser desplazable radialmente hacia y lejos del centro de giro O de la superficie rotatoria 1, por ejemplo mediante un dispositivo de accionamiento alternante, no mostrado, y por estar guiado en unas guías 4. En la ilustración esquemática según la figura 1, dicho dispositivo 3 se muestra como una varilla que tiene un extremo formado en horquilla 5 enfrentado al centro O de la superficie rotatoria, finalizando en dos dedos separados 6, 7 que tienen una bisectriz intermedia que se extiende radialmente hacia el centro de giro O de la superficie rotatoria 1. Cuando la pieza de trabajo anular ha sido situada de manera aleatoria sobre la superficie 1, ésta se pone en marcha para girar lentamente, y en la situación en la que la pieza de trabajo 2 ha sido situada con relación al dispositivo 3, de tal modo que está soportada por los dedos 6, 7 del dispositivo 3, dichos dedos 6, 7 son retraídos gradualmente en la dirección de la bisectriz intermedia hasta que la pieza de trabajo 2 no esté afectada por los dedos 6, 7 durante una revolución de la superficie rotatoria 1.
En una situación en la que la pieza de trabajo 2 ha sido situada de tal modo que no está fácilmente en contacto con los dedos 6, 7 del dispositivo 3, dicho dispositivo 3 se hace avanzar primero radialmente hacia el centro de giro O de la superficie rotatoria 1 y, cuando alguno de los dos dedos 6, 7 de la horquilla 5 del dispositivo de empuje 3 durante su movimiento de avance alcanza la superficie envolvente exterior de la pieza de trabajo 2, se inclinará de tal modo que ambos dedos 6, 7 contactarán con la superficie envolvente exterior de la pieza de trabajo en posiciones separadas, sometiendo por ello dicha pieza a dos fuerzas separadas, que actúan ambas en una dirección hacia la superficie 1 que gira lentamente.
Este movimiento de avance del dispositivo 3, que actúa en este caso para empujar la pieza de trabajo 2, se mantiene hasta que dicha pieza 2 ha sido empujada tanto que su centro A sobrepasa y llega justo más allá del centro de giro O de la superficie rotatoria 1, tal como se muestra en la figura 2.
Cuando se ha alcanzado esta posición, se detiene el movimiento de avance del dispositivo de empuje, y el dispositivo de empuje 3 es retraído lentamente, como se muestra en la figura 3. Cuando la superficie rotatoria 1 sigue su rotación lenta y ha realizado una rotación de 180º, si se compara con la posición mostrada en las figuras 1 y 2, la pieza de trabajo...
Reivindicaciones:
1. Un método para efectuar el centrado automático de una pieza de trabajo anular
(2) en una superficie rotatoria (1) que tiene un centro de giro (O), que incorpora las siguientes etapas:
a) situar arbitrariamente la pieza de trabajo (2) sobre la superficie (1) que gira lentamente, b) aplicar un soporte para la pieza de trabajo (2) por medio de un primer miembro de contacto (6; 13) y un segundo miembro de contacto (7; 14) separado del primer miembro de contacto, y haciendo contactar individualmente ambos miembros de contacto con la pieza de trabajo y siendo desplazables de modo sincrónico de manera alternativa guiada hacia y lejos del centro de giro (O) de la superficie rotatoria (1), c) hacer que se retraigan gradualmente dichos miembros de contacto primero y segundo (6, 7; 13, 14) lejos del centro de giro (O) de la superficie rotatoria (1) hasta que la pieza de trabajo (2) no esté afectada por los miembros de contacto (6, 7; 13, 14) durante una revolución de la superficie rotatoria (1), por lo que la pieza de trabajo (2) ha sido centrada y el centro (A) de la pieza de trabajo (2) coincide con el centro de giro (O) de la superficie rotatoria (1), d) disponer, al menos en uno de dichos miembros de contacto separados (6, 7; 13, 14), unos medios (8; 15, 16) para contrarrestar una fuerza de rozamiento que actúa sobre la pieza de trabajo (2) en esta posición, fuerza de rozamiento que, de otro modo, daría como resultado una componente de fuerza que actuaría sobre la pieza de trabajo (2) para desplazarla radialmente hacia fuera desde el centro (O) de la superficie rotatoria (1), caracterizado porque al menos uno de dichos miembros de contacto (6, 7; 13, 14) está provisto de, o diseñado como, una rueda accionada de manera rotatoria (8, 15), un disco accionado de manera rotatoria o una correa accionada (16) como los medios para contrarrestar la fuerza de rozamiento entre al menos uno de dichos miembros de contacto (7, 13, 14) y la pieza de trabajo (2).
2. El método según la reivindicación 1, en el que el método incorpora utilizar como los miembros de contacto primero y segundo, unos dedos (6, 7) que contactan con la
pieza de trabajo al menos en dos posiciones separadas y que tienen una bisectriz intermedia que se extiende radialmente hacia el centro de giro (O) de la superficie rotatoria (1), y hacer que se retraigan gradualmente dichos dedos (6, 7) en la dirección de la bisectriz intermedia hasta que la pieza de trabajo (2) no esté afectada por los dedos (6, 7) durante una revolución de la superficie rotatoria (1), y disponer al menos en uno de dichos dedos separados (7, 6), unos medios (8) para contrarrestar una fuerza de rozamiento que actúa sobre la pieza de trabajo (2) en esta posición.
3. El método según la reivindicación 1, en el que el método incorpora la utilización de un primer miembro de contacto (13) y un segundo miembro de contacto (14), contactando individualmente ambos con la pieza de trabajo y siendo desplazables individualmente, pero de modo sincrónico, de manera alternativa guiada acercándose y alejándose entre sí y hacia y lejos del centro de giro (O) de la superficie rotatoria (1), y disponer, al menos en uno de dichos miembros de contacto separados (13, 14), unos medios (15, 16) para contrarrestar una fuerza de rozamiento que actúa sobre la pieza de trabajo (2) en esta posición.
4. El método según cualquiera de las reivindicaciones 1 a 3, en el que incorpora además, después de las etapas a) y b), pero antes de las etapas c) y d), empujar, por medio de dichos miembros de contacto (6, 7; 13, 14), la pieza de trabajo (2) hacia el centro de giro (O), tanto que el centro (A) de la pieza de trabajo (2) sobrepase el centro de giro (O) de la superficie rotatoria (1).
5. El método según la reivindicación 2 ó 4, caracterizado porque utiliza un dispositivo de empuje desplazable (3) guiado que tiene una horquilla (5) que soporta dichos al menos dos dedos separados (6, 7) para aplicar el soporte y/o la fuerza de empuje sobre la pieza de trabajo (2).
6. El método según cualquiera de las reivindicaciones 1 a 5, caracterizado porque ambos miembros de contacto (6, 7; 13, 14) tienen ruedas (8; 15) o correas (16) accionadas.
7. El método según la reivindicación 6, caracterizado porque las ruedas (8; 15) o las correas (16) son accionadas en sentidos rotatorios opuestos.
8. Un dispositivo para efectuar el centrado automático de una pieza de trabajo anular (2) en una superficie rotatoria (1), con el método según la reivindicación 1, y que incorpora una superficie (1), dispuesta para girar alrededor de un centro (O), unos medios de apoyo y/o empuje (3; 13, 14) dispuestos para ser desplazables de manera alternativa en direcciones que se cruzan con el centro (O) de la superficie rotatoria, estando provistos dichos medios de apoyo y/o empuje al menos de dos miembros de contacto separados (6, 7; 13, 14) y dispuestos juntos para contactar con la superficie envolvente exterior de dicha pieza de trabajo anular (2) para soportar la pieza de trabajo empujándola alternativamente hacia y más allá del centro de giro (O) de la superficie rotatoria (1) en movimiento de avance de dichos miembros de contacto (6, 7; 13, 14), y para ser desplazada gradualmente hacia fuera en movimiento de retorno de los medios de apoyo y/o empuje, en el que al menos uno de dichos miembros de contacto (6, 7; 13, 14) está provisto de, o diseñado como, una rueda accionada de manera rotatoria (8, 15), un disco accionado de manera rotatoria o una correa accionada (16) como los medios para contrarrestar la fuerza de rozamiento entre al menos uno de dichos miembros de contacto (7, 13, 14) y la pieza de trabajo (2).
9. El dispositivo según la reivindicación 8, caracterizado porque los medios de apoyo y/o empuje (3) están provistos en su extremo de dichos miembros de contacto (6, 7), formados como dedos separados.
10. El dispositivo según la reivindicación 9, caracterizado porque ambos dedos (6, 7) están provistos de ruedas o correas accionadas individualmente.
11. El dispositivo para efectuar el centrado automático de una pieza de trabajo anular (2) en una superficie rotatoria (1), con el método según la reivindicación 3, y que incorpora una superficie (1), dispuesta para girar alrededor de un centro (O), un primer miembro de contacto (13) dispuesto para ser desplazable de manera alternativa en una dirección radialmente contra el centro (O) de la superficie rotatoria, y un segundo miembro de contacto (14) dispuesto para ser desplazable de modo alternante en una dirección
radialmente contra el centro (O) de la superficie rotatoria para soportar y/o empujar la pieza de trabajo (2), por lo que dichos miembros de contacto primero y segundo (13, 14) están dispuestos para contactar con la superficie envolvente exterior de dicha pieza de trabajo anular (2) en dos posiciones separadas para soportar la pieza de trabajo empujando alternativamente la pieza de trabajo hacia y más allá del centro de giro (O) de la superficie rotatoria (1) en movimiento de avance de dichos miembros de contacto (13, 14), y para ser desplazado gradualmente hacia fuera en movimiento de retorno de los miembros de contacto (13, 14), en el que al menos uno de dichos miembros de contacto (13, 14) está provisto de unos medios (15, 16) dispuestos para contrarrestar fuerzas de rozamiento que actúan entre la pieza de trabajo anular (2) y dichos miembros de contacto (13, 14), que están en contacto entre la pieza de trabajo anular y dichos miembros de contacto (3, 4), medios que están formados como una rueda accionada de manera rotatoria (15) o una correa accionada (16).
12. El dispositivo según las reivindicación 11, caracterizado porque ambos miembros de contacto (13, 14) están provistos de ruedas accionadas individualmente (15)
o correas accionadas individualmente (16).
13. El dispositivo según cualquiera de las reivindicaciones 8 a 12, caracterizado porque la superficie rotatoria (1) es un plato magnético, y el dispositivo está destinado a situar la pieza de trabajo anular (2) en una posición centrada con precisión sobre el plato, antes de un tratamiento mecánico de la pieza de trabajo (2).
14. El dispositivo según cualquiera de las reivindicaciones 8 a 13, caracterizado porque los miembros de contacto (6, 7; 13, 14) están conectados a, y accionados mediante, un sistema de correderas de mecanizado o un sistema de correderas independiente en una máquina herramienta.
Patentes similares o relacionadas:
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Máquina amoladora para elementos en forma de placa, particularmente baldosas y placas de cerámica, piedras naturales, vidrio o similares, del 4 de Septiembre de 2019, de ANCORA S.P.A: Máquina para amolar elementos en forma de lámina, particularmente baldosas y losas hechas de material cerámico, piedras naturales, vidrio o similares, […]
Dispositivo de fijación con un mandril de fijación y con un soporte de trabajo que se puede fijar en él de manera amovible, del 6 de Marzo de 2019, de EROWA AG: Dispositivo de fijación con un mandril de fijación y con un soporte de la pieza de trabajo que se puede fijar en él de manera desprendible, en donde el mandril […]
Dispositivo de centrado giratorio para la transferencia guiada de barras de un alimentador a un torno, del 27 de Febrero de 2019, de Bucci Automations S.p.A: Dispositivo de centrado giratorio para su uso durante la transferencia de una barra desde el canal de guiado de un alimentador hasta un torno, comprendiendo el dispositivo […]
 Dispositivo de alineación, y método de alineación que utiliza un dispositivo de alineación, del 20 de Febrero de 2019, de BAE SYSTEMS PLC: Un dispositivo de alineación configurado para recibir, en una configuración generalmente alineada, piezas de trabajo que han de ser unidas […]
Dispositivo de alineación, y método de alineación que utiliza un dispositivo de alineación, del 20 de Febrero de 2019, de BAE SYSTEMS PLC: Un dispositivo de alineación configurado para recibir, en una configuración generalmente alineada, piezas de trabajo que han de ser unidas […]
DISPOSITIVO DE SUJECIÓN DE PIEZAS, del 7 de Febrero de 2019, de FRESMAK, SA: La invención se refiere a un dispositivo de sujeción de piezas, que comprende un cuerpo principal , dos mordazas enfrentadas para sujetar las piezas, […]
Dispositivo de sujeción de piezas, del 5 de Febrero de 2019, de FRESMAK S.A.: La invención se refiere a un dispositivo de sujeción de piezas, que comprende un cuerpo principal , dos mordazas enfrentadas para […]