MÉTODO Y DISPOSITIVO DE DETECCIÓN DE RADARES DE CONTROL DE TRAMO.
Método de detección de radares de control de tramo, que comprende,
al menos, una primera etapa de inicio (100), donde se evalúa si la posición actual es igual que la posición del radar (101), y donde una vez establecida la presencia cercana de un radar de tramo, se consulta si los medios de posicionamiento global GPS están activos (102); dicho método estando caracterizado porque en el caso de que el GPS esté inactivo, se evalúa si existe o no existe conexión con el vehículo (103), estableciéndose dos procesos paralelos en función de dicha conexión: (i) un primer proceso de cálculo de la velocidad media en un tramo mediante la conexión a un determinado vehículo; y (ii) un segundo proceso de cálculo de la velocidad media en un tramo sin conexión a un vehículo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130129.
Solicitante: CRAMBO, S.A.
Nacionalidad solicitante: España.
Inventor/es: GARCIA MANCHADO,NILO, GARCIA MANCHADO,MIGUEL ANGEL, HERNÁNDEZ CABANILLAS,Sergio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/36 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Disposiciones de entrada/salida para ordenadores de a bordo.
- G01S19/52 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Determinación de la velocidad.
- G08G1/0967 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas que incluyen transmisión de informaciones para las grandes vías circulatorias, p. ej. condiciones meteorológicas, límites de velocidad (G08G 1/0968 tiene prioridad).
Descripción:
El objeto de la presente invención es un método y un dispositivo de detección de radares de control de tramo en cualquier tipo de carretera, mediante el empleo de medios de posicionamiento global (GPS) .
ESTADO DE LA TÉCNICA ANTERIOR
Los radares de tramo analizan la velocidad media de un vehículo detectando la entrada de dicho vehículo en un dicho tramo 15 controlado, así corno la salida del mismo mediante dos o más detectores de radar o cámaras identificando al vehículo en el principio del tramo y al final del mismo. Mediante una simple operación o cálculo matemático, unos medios de computación calculan la velocidad media del vehículo en ese determinado tramo.
Generalmente, estos radares se sitúan al principio de túneles y
al final de basados en 2 5 usuario si largo del
los mismos. el empleo su velocidad tramo pueden
Las tecnologías de avisadores de radar
de GPS, resulta imposible avisar al media es correcta o no, ya que a lo existir muchos cambios de velocidad
creando ámbitos de incertidumbre en el conductor sobre si será
o no multado por culpa de dichos radares, generando incluso
nerviosismo e inseguridad al conductor.
30
EXPLICACIÓN DE LA INVENCIÓN
La solución del problema tiene dos vías una con dispositivos que tengan la posibilidad de conectarse al vehículo para 35 conocer la velocidad en todo momento independientemente de la velocidad conocida por el GPS ya que tenernos zonas en los que esta velocidad proporcionada por el GPS no es posible de tener
por las diversas zonas de sombra. Por tanto la primera solución
sería la conexión a los datos de un vehículo y la combinación
de éstos con los datos de posicionamiento del radar y la
presentación al usuario de la información en este caso de su
5 velocidad media acumulada de manera que el conductor pueda
tener dicha información en todo momento lógicamente desde el
inicio del tramo hasta la terminación del mismo, por tanto lo
que haría esta invención es combinar los datos provenientes del
vehículo en este caso la velocidad y los datos de
1 O posicionamiento del radar de tramo y presenta al conductor
dicha información combinada con los máximos de la vía indicando
al conductor cuando su velocidad acumulada se excede de la
permitida, también podría utilizar la distancia recorrida y
compararla con el tiempo transcurrido y éste a su vez con la
15 distancia entre tramos calculando la velocidad media y la
diferencia entre ésta y la máxima de la vía.
La otra vía de solución del problema es cuando el dispositivo
no puede conectarse al vehículo y sus datos son sólo los
20 provenientes del GPS, en este caso cuando el radar se encuentre
en una zona de sombra y por tanto el dispositivo no conoce la
velocidad no puede indicarle al usuario la velocidad media,
siendo imposible ofrecer dicha velocidad en tiempo real, para
esta situación lo que hace la invención es calcular el tiempo
25 restante que tendría que usar el vehículo para encontrarse con
la salida del túnel o el detector de tramo saliente, de forma
que durante todo el tramo el conductor recibe información de
cuánto tiempo le queda para el detector saliente permitiéndole
reducir su velocidad en la medida que vea que se acerca la
30 salida y no ha cumplido la media.
Esta solución permite ofrecerle al usuario información sobre el
tiempo que queda para que llegue al final del tramo, además le
ofrece también le ofrece la distancia que queda hasta el final
35 del tramo por lo que él mismo viendo el contador de velocidad
del vehículo puede compara en tiempo real si está cerca o no
del final del control de velocidad de tramo. Esta solución
permite a los conductores reducir la incertidumbre dentro de las zonas de sombra GPS y adaptar su velocidad a los requerimientos de la ley sin riesgo de multas.
La invención también avisa por colores del riesgo de multa ofreciendo diferentes colores en función de la cercanía o no al momento cuando el usuario no está en riesgo.
Lo que hace la invención es ofrecer en tiempo real el tiempo que debería utilizar el conductor para llegar al punto saliente del control de velocidad de tramo, es decir si hay 5 km entre el lugar de comienzo control de velocidad y el final del mismo y el máximo de la vía es de 100 km/h el conductor debería tardar 3 minutos en ir desde el control inicial hasta el final, la invención le ofrece al usuario un cronometro descendente desde el momento exacto cuando cruza el lugar de comienzo indicándole el tiempo que le queda para llegar al final del tramo, esto le permite controlar su velocidad de manera más precisa que si no tuviese esta información.
A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se pretende que sean limitativos de la presente invención. Además, la presente invención cubre todas las posibles combinaciones de realizaciones particulares y preferidas aquí indicadas.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
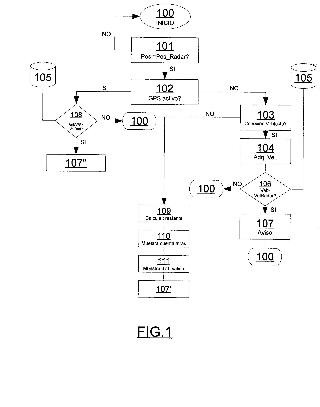
FIG.l muestra una vista de un diagrama de flujo del método objeto de la presente invención.
O
EXPOSICIÓN DETALLADA DE LOS MODOS DE REALIZACIÓN
Tal y corno se muestra en la FIG.l, el método de detección de radares de control de tramo, objeto de la presente invención comprende, al menos, una primera etapa de inicio (100) , donde se evalúa si la posición actual es igual que la posición del radar (101) .
Una vez establecida la presencia cercana de un radar de tramo, se consulta si los medios de posicionamiento global GPS están activos (102) .
En el caso de que el GPS esté activo, el control es simple, puesto que simplemente compara (108) la velocidad adquirida por el GPS con la velocidad máxima del radar, adquirida de unos medios de almacenamiento de datos del propio dispositivo. Si la velocidad del vehículo es mayor que la velocidad del radar, entonces se genera un aviso (107'') al conductor, a través de los medios de visualización de datos del propio dispositivo.
En el caso de que el GPS esté inactivo, se evalúa si existe o no existe conexión con el vehículo (103) , estableciéndose dos procesos diferenciados en función de dicha conexión.
Proceso con conexión al vehículo Cuando el dispositivo está conectado al propio vehículo, la velocidad se adquiere (104) a través de la propia centralita. Tras ello, se establece si la velocidad actual es mayor (106) que la velocidad del radar de tramo (1 05) adquirida de los medios de almacenamiento de datos del propio dispositivo, de tal forma que, si la velocidad media del vehículo es mayor, se genere un aviso (107) al usuario y si es inferior, se retorne al inicio (100) del método, para su reevaluación en bucle.
Proceso sin conexión al vehículo En el caso de que la conexión sea imposible, entonces se calcula el tiempo restante (109) que tendría que usar el
vehículo para encontrarse con el detector de tramo siguiente (igualmente almacenada su posición en los medios propios del dispositivo) , todo ello de tal forma que, durante todo el tramo el conductor recibe información de cuánto tiempo le queda (110) 5 para el detector saliente, perrnitiéndole reducir su velocidad en la medida que vea que se acerca la salida y no ha cumplido con la media. Del mismo modo, se muestra la distancia hasta la salida (111) o final de tramo. Comparándose ambos datos (110, 111) , se genera un aviso (107') en tiempo real al usuario en función de si llega o no con la velocidad media adecuada.
El método descrito emplea, así mismo, referencias contextuales de la salida del tramo controlado. Es probable, sobre todo en la salida de los túneles, que el GPS no se active con la suficiente rapidez corno para calcular la posición y determinar que ha salido. No obstante, el empleo de una cámara, video o similar en el dispositivo y el almacenamiento de dichos datos corno referencia sirve para solventar este problema y determinar la salida de la zona controlada.
Reivindicaciones:
1. -Método de detección de radares de control de tramo,
que comprende, al menos, una primera etapa de inicio (100) ,
5 donde se evalúa si la posición actual es igual que la posición
del radar (101) , Y donde una vez establecida la presencia
cercana de un radar de tramo, se consulta si los medios de
posicionamiento global GPS están activos (102) ; dicho método
estando caracterizado porque en el caso de que el GPS esté
1 O inactivo, se evalúa si existe o no existe conexión con el
vehículo (103) , estableciéndose dos procesos paralelos en
función de dicha conexión:
(i) un primer proceso de cálculo de la velocidad media en
un tramo mediante la conexión a un determinado vehículo la
15 velocidad se adquiere (104) a través de la propia centralita; y
donde se establece si la velocidad actual es mayor (106) que la
velocidad del radar de tramo (105) , de tal forma que, si la
velocidad media del vehículo es mayor, se genere un aviso (107)
en tiempo real al usuario; y
20 (ii) un segundo proceso de cálculo de la velocidad media
en un tramo sin conexión a un vehículo, donde se calcula el
tiempo restante (109) que tendría que usar el vehículo para
encontrarse con el detector de tramo siguiente y se muestra
cuánto tiempo le queda (110) para el detector saliente, así
25 como la distancia hasta la salida (111) o final de tramo; y
donde comparándose ambos datos (110, 111) , se genera un aviso
(107') en tiempo real al usuario.
2.Método de acuerdo con la reivindicación 1 que se
30 caracteriza porque en el caso de que el GPS esté activo, el
control es simple, puesto que simplemente compara (108) la
velocidad adquirida por el GPS con la velocidad máxima del
radar, adquirida de unos medios de almacenamiento de datos del
propio dispositivo; y donde si la velocidad del vehículo es
35 mayor que la velocidad del radar, entonces se genera un aviso
(107") al conductor, a través de los medios de visualización
de datos del propio dispositivo.
3. -Método de acuerdo con las reivindicaciones 1 y 2 en donde emplea referencias contextuales de la salida del tramo controlado basadas en una imagen capturada mediante una cámara o video del dispositivo y el almacenamiento de las imágenes de la salida del tramo controlado para la determinación de la salida del tramo controlado.
NO
SI
NO
VeIGPS> VelRad?
SI
100
INICIO
101
Pos:=Pos_Radar?
SI
102
GPS activo? NO
NO
NO 106 Vel> VelRadar?
SI
107
Aviso
FIG.1
103
Conexión Vehiculo?
SI
104
Adq. Vel.
Patentes similares o relacionadas:
METODO Y SISTEMA DE CONTROL DE VEHICULOS ELECTRICOS MONOPLAZA, del 30 de Julio de 2020, de DURAN SERRADELL , Victor: Procedimiento de control de vehículos eléctricos monoplaza, que comprende los pasos de: - captación en tiempo real por parte del vehículo eléctrico monoplaza […]
Controlador inalámbrico de velocidad para vehículos, del 29 de Junio de 2020, de BLANCO MUÑOZ,JUAN: La invención denominada controlador inalámbrico de velocidad para Vehículos, comprende un sistema y procedimiento para limitar la velocidad máxima de un vehículo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Política de distribución de mensajes local y global en un sistema de transporte inteligente que utiliza comunicaciones inalámbricas, del 11 de Diciembre de 2019, de HUAWEI TECHNOLOGIES CO., LTD.: Una entidad de comunicación (100a) asociada con una estación base (101a), en donde la entidad de comunicación (100a) comprende: un analizador […]
Sistema y procedimiento de modificación remota del funcionamiento de un vehículo, del 16 de Octubre de 2019, de Deep Science, LLC: Un sistema para controlar las emisiones de vehículos en un área geográfica, comprendiendo el sistema un sistema de control de motor para un vehículo que tiene […]
Un sistema de información y alerta de seguridad para vehículos, del 9 de Octubre de 2019, de Status Technologies Pty Ltd: Un sistema de alerta de seguridad para rally de vehículos que permite la comunicación de información sobre peligros, peligros potenciales […]
SISTEMA DE CONTROL DE UN VEHÍCULO, del 12 de Septiembre de 2019, de ALVAREZ TRONCOSO, Pablo: Sistema de control de un vehículo que comprende: - una célula inteligente con capacidad de almacenaje y transmisión de información del estado del […]
 Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]
Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]