Método para la detección de un desplazamiento para un dispositivo de seguridad para peatones.
Método para la detección de desplazamientos para un dispositivo de seguridad para peatones,
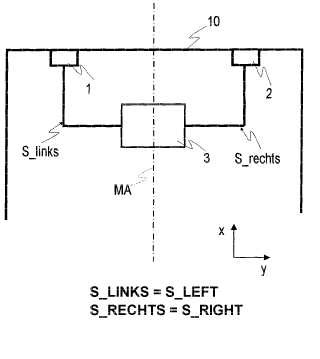
en el cual se determinan datos de sensores y se evalúan para la determinación de un punto de impacto de un objeto, en donde en el caso de una colisión con un objeto se realiza una obtención de las características para la determinación del desplazamiento del punto de impacto, con los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2), caracterizado porque en la obtención de las características se obtiene una primera característica (ratio_dif_sum) para la determinación del desplazamiento a partir de una comparación de una señal diferencial y una señal sumatoria de los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/055359.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: MACK,FRANK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/01 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › Circuitos eléctricos para activar dispositivos de seguridad en el vehículo en caso de accidente o de ser éste inminente.
- B60R21/34 B60R 21/00 […] › Protección de no ocupantes del vehículo, p. ej. peatones.
PDF original: ES-2379470_T3.pdf
Fragmento de la descripción:
Método para la detección de un desplazamiento para un dispositivo de seguridad para peatones.
Estado del arte La presente invención hace referencia a un método para la detección de desplazamientos para un dispositivo de seguridad para peatones, de acuerdo con la clase de la reivindicación independiente 1. En relación con la presente invención, se indica como un desplazamiento la distancia de un punto de impacto de un objeto en relación con un eje medio de un vehículo a motor.
Debido al anuncio de la introducción de una ley europea para la reducción de la gravedad de las heridas causadas a un peatón en el caso de una colisión entre un peatón y un vehículo a motor, los nuevos vehículos a motor se deben fabricar de manera que las heridas que puedan causarse a un peatón en el caso de una colisión permanezcan dentro de los límites exigidos en dicha ley europea.
Una primera estrategia para la reducción de las heridas de los peatones consiste en crear una zona de absorción de impactos para los peatones, mediante modificaciones en el parachoques y en el diseño del vehículo a motor, con el fin de reducir de esta manera el riesgo de heridas mediante una solución pasiva.
Una segunda estrategia intenta detectar el impacto de un peatón mediante un sistema de sensores apropiado, y a continuación mediante el control activo de un dispositivo de seguridad para peatones, como, por ejemplo, airbags exteriores en los pilares A y/o mediante la elevación del capó del motor, para crear las zonas de absorción de impacto requeridas. En el caso de la solución activa se pueden utilizar los diferentes principios de sensores, desde sensores de aceleración, de presión, de impacto, piezoeléctricos, hasta los sensores ópticos, etc.
En la declaración de patente DE 103 21 209 A1 se describe, por ejemplo, un sistema de sensores de colisión para detectar una colisión de un vehículo a motor con un objeto. El sistema de sensores de colisión descrito se puede utilizar para un dispositivo de seguridad para peatones, y presenta un cuerpo hueco que puede ser deformado por un objeto que colisiona con el vehículo a motor y en el cual se puede generar una onda de compresión mediante la colisión, la cual es detectada mediante, al menos, un sensor de presión, y se evalúa para la determinación de un punto de impacto del objeto. Para la determinación del desplazamiento del punto de impacto del objeto, se realiza una obtención de características con los datos de sensores de, al menos, dos sensores de presión. Además, se recomienda evaluar las diferencias en el tiempo de recorrido entre las ondas de compresión detectadas por los, al menos, dos sensores de presión, para la determinación de la posición lateral de la colisión, dado que las ondas de compresión generadas llegan a los sensores de presión con un desplazamiento en el tiempo.
En la solicitud de patente internacional WO 2004/058545 A1 se describe un sistema de sensores de colisión para detectar una colisión de un vehículo a motor con un objeto, para un dispositivo de seguridad para peatones. Para la determinación de un punto de impacto del objeto con el vehículo a motor, se realiza una obtención de características con los datos de sensores de, al menos, dos sensores. Además, se recomienda realizar una suma de los valores de medición y determinar el punto de impacto del objeto en base a la suma de los valores de medición y a una distancia conocida entre ambos sensores.
En la declaración de patente US 2004/0064230 A1 se describe un dispositivo de seguridad para peatones para un vehículo a motor. El dispositivo de seguridad para peatones descrito realiza una obtención de características con dos tensiones de señal para la determinación de un punto de impacto de un objeto con el vehículo a motor. Además, se recomienda conformar una tensión diferencial a partir de las tensiones de señal, y en base a la tensión diferencial se determina el punto de impacto del objeto.
Dichos tres documentos revelan el concepto general de la reivindicación 1.
Ventajas de la presente invención.
En comparación, el método conforme a la presente invención para la detección de un desplazamiento para un dispositivo de seguridad para peatones, con las características de la reivindicación independiente 1, presenta una ventaja que consiste en la posibilidad de una detección de desplazamiento fiable, en el caso de una colisión con un objeto, mediante la obtención de características a partir de los datos de sensores de, al menos, dos sensores. Además, de manera ventajosa se puede obtener información que indique si la colisión se produce con un desplazamiento considerable, es decir, con una distancia considerable en relación con el eje medio del vehículo a motor, o con un desplazamiento reducido, es decir, con una distancia reducida en relación con el eje medio del vehículo a motor.
Una primera característica para la determinación del desplazamiento se obtiene, conforme a la presente invención, a partir de la comparación de la señal diferencial y la señal sumatoria de los datos de los sensores de, al menos, dos sensores. Ante una colisión sin desplazamiento, los datos de los sensores son prácticamente idénticos, en el caso de una colocación simétrica de ambos sensores en relación con el eje medio del vehículo a motor. Esto significa que la señal diferencial entre los datos de los sensores de, al menos, dos sensores, asciende prácticamente a cero, mientras que la señal sumatoria adopta valores mayores a partir de ambos datos de sensores. Ante un desplazamiento reducido, los datos de los, al menos dos, sensores oscilan en fase opuesta. Esto significa que la señal diferencial es elevada, mientras que la señal sumatoria se vuelve casi cero. En el caso de la detección de datos de un desplazamiento mayor en uno de los sensores y que sea considerablemente mayor respecto a, al menos dos, de los sensores, esto es, en comparación con otros de los, al menos dos, sensores, se presentará una relación de fase entre ambos datos de sensores de forma que la señal diferencial presente aproximadamente la misma magnitud que la señal sumatoria.
A partir de dichas propiedades, la señal sumatoria y la señal diferencial de los datos de sensores de, al menos, dos sensores, permiten obtener de manera ventajosa una información en función del desplazamiento de un impacto de un objeto.
Mediante el método conforme a la presente invención se permite una detección precisa y fiable del punto de impacto de un peatón o una persona sobre el parachoques en el sentido y. Esto permite una activación segura y fiable de los sistemas de seguridad para el peatón, en tanto que, por ejemplo, se seleccionan los diferentes umbrales activadores según sea el punto de impacto y, de esta manera, se logra una diferenciación entre el peatón y otros objetos. De esta manera, se incrementa el potencial de seguridad para los peatones con una reducción simultánea de los costes que pueden surgir mediante una activación no deseada del dispositivo de seguridad para peatones, por ejemplo, en el caso se colisiones con otros objetos. Además, se evitan las molestias para el conductor mediante una activación, por ejemplo, la elevación del capó del motor, que perjudique la calidad de su conducción.
Mediante las medidas y perfeccionamientos mencionados en las reivindicaciones relacionadas, se pueden realizar mejoras ventajosas del método para la detección de un desplazamiento para un dispositivo de seguridad para peatones, mencionado en la reivindicación independiente 1.
Resulta particularmente ventajoso que los datos del vehículo a motor que son proporcionados, preferentemente, por un sistema de bus del vehículo a motor, se utilicen para la obtención de características, en donde los datos del vehículo a motor comprenden una velocidad propia del vehículo a motor y/o un índice de guiñada y/o una velocidad relativa entre el vehículo a motor y un objeto. La velocidad relativa puede ser determinada, por ejemplo, por un sistema de sensores de radar, un sistema de sensores de ultrasonido, un sistema de vídeo, etc. Conociendo la velocidad propia del vehículo a motor o la velocidad relativa, se pueden determinar de manera precisa, por ejemplo, los instantes en el tiempo y los intervalos de tiempo para la detección del desplazamiento. El conocimiento del índice de guiñada puede suministrar información relativa al supuesto lado de contacto, en el caso de un derrape.
Resulta particularmente ventajoso cuando previamente a la comparación... [Seguir leyendo]
Reivindicaciones:
1. Método para la detección de desplazamientos para un dispositivo de seguridad para peatones, en el cual se determinan datos de sensores y se evalúan para la determinación de un punto de impacto de un objeto, en donde en el caso de una colisión con un objeto se realiza una obtención de las características para la determinación del desplazamiento del punto de impacto, con los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2) , caracterizado porque en la obtención de las características se obtiene una primera característica (ratio_dif_sum) para la determinación del desplazamiento a partir de una comparación de una señal diferencial y una señal sumatoria de los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2) .
2. Método de acuerdo con la reivindicación 1, caracterizado porque los datos del vehículo a motor que son proporcionados preferentemente por un sistema de bus del vehículo a motor, se utilizan para la obtención de características, en donde los datos del vehículo a motor comprenden una velocidad propia del vehículo a motor y/o un índice de guiñada y/o una velocidad relativa.
3. Método de acuerdo con la reivindicación 1 ó 2, caracterizado porque antes de la comparación de señales se conforman respectivamente los valores absolutos de la señal diferencial y de la señal sumatoria, y se suman de forma continua en el tiempo, en donde para la comparación de señales se conforma la relación entre el valor absoluto de la señal diferencial y el valor absoluto de la señal sumatoria.
4. Método de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque para la obtención de una segunda característica (ratio_máx_mín) se suman respectivamente los valores absolutos de los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2) , se determinan el valor máximo y el valor mínimo de los valores absolutos sumados y se comparan entre sí.
5. Método de acuerdo con la reivindicación 4, caracterizado porque para la comparación de señales se conforma la relación entre el valor máximo determinado y el valor mínimo determinado, de la cual se resta el valor 1 para la conformación de la segunda característica (ratio_máx_mín) .
6. Método de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque se utilizan factores de compensación para la compensación de una estructura frontal asimétrica (10) del vehículo a motor y/o de una colocación asimétrica de, al menos, dos sensores (1, 2) en relación con el eje longitudinal del vehículo a motor (MA) .
7. Método de acuerdo con una de las reivindicaciones 4 a 6, caracterizado porque para la determinación del desplazamiento se evalúan la primera característica (ratio_dif_sum) y/o la segunda característica (ratio_máx_mín) en función de, al menos, un instante temporal predeterminado.
8. Método de acuerdo con una de las reivindicaciones 4 a 7, caracterizado porque para la determinación del desplazamiento se evalúan un valor medio de la primera característica (ratio_dif_sum) y/o de la segunda característica (ratio_máx_mín) dentro de, al menos, un intervalo de tiempo predeterminado.
9. Método de acuerdo con la reivindicación 7 u 8, caracterizado porque el instante temporal de evaluación y/o el intervalo de tiempo de evaluación para la determinación del desplazamiento, se establecen en función de los datos del vehículo a motor que se proporcionan preferentemente a través de un sistema de bus.
10. Método de acuerdo con una de las reivindicaciones 4 a 9, caracterizado porque para la determinación del desplazamiento se divide un espacio de características conformado por la primera y la segunda característica (ratio_dif_sum, ratio_máx_mín) , mediante diferentes umbrales en una pluralidad de zonas (G1 a G3, G4 a G8) , preferentemente tres o cinco zonas (G1 a G3, G4 a G8) , y se comprueba si la primera característica (ratio_dif_sum) y la segunda característica (ratio_máx_mín) se encuentran en una de las zonas (G1 a G3, G4 a G8) .
11. Método de acuerdo con la reivindicación 10, caracterizado porque se detecta una situación inadmisible, y para la determinación del desplazamiento se utiliza un valor por defecto, cuando la primera característica (ratio_dif_sum) y la segunda característica (ratio_máx_mín) no se encuentran en ninguna de las zonas (G1 a G3, G4 a G8) .
12. Método de acuerdo con una de las reivindicaciones 1 a 11, caracterizado porque las características adicionales para la determinación del desplazamiento se conforman a partir de los datos del vehículo a motor y/o de un intervalo de tiempo y/o de un signo de los valores máximos y/o de los valores mínimos de los datos de sensores (S_derecha, S_izquierda) de, al menos, dos sensores (1, 2) .
13. Método de acuerdo con una de las reivindicaciones 1 a 12, caracterizado porque el dispositivo de seguridad para peatones se activa con diferentes grados en función del valor de desplazamiento determinado, sólo de un lado del vehículo a motor o a ambos lados del vehículo a motor.
Patentes similares o relacionadas:
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
 Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Sensor de accidentes, del 29 de Mayo de 2019, de ROBERT BOSCH GMBH: Vehículo con una pared y un sensor de accidentes con medios de fijación a un vehículo; en donde los medios […]
Método y dispositivo para impedir o disminuir el riesgo de una lesión en los ocupantes de un vehículo en el caso de una colisión por alcance, del 15 de Mayo de 2019, de Hochschule Kaiserslautern University of Applied Sciences: Método para evitar o disminuir el riesgo de lesión para los ocupantes de un vehículo en el caso de una colisión por alcance con los siguientes pasos de método: […]
Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caído al agua, del 26 de Noviembre de 2018, de UNIVERSIDAD DE CADIZ: Sistema automático de ayuda a la evacuación de los ocupantes de un automóvil caldo al agua. La presente invención facilita la evacuación de un […]
CONJUNTO DE PREVENCIÓN DE ACCIDENTES, del 11 de Octubre de 2018, de PÉREZ DEL MONTE, Ángel: 1. Conjunto de prevención de accidentes, caracterizado porque comprende un emisor de luz que se encuentra en conexión con un pulsador de activación integrado en […]
Sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, del 3 de Octubre de 2018, de UNIVERSIDAD DE ALCALA.: El sistema de supervisión mediante visión artificial para menores que viajan en sistemas de retención infantil, hace referencia a una invención basada en técnicas […]
Método y aparato para controlar un dispositivo de seguridad accionable, del 5 de Julio de 2017, de TRW AUTOMOTIVE U.S. LLC: Un método para determinar una condición de colisión de un vehículo incluyendo los pasos de: detectar la aceleración de colisión en una primera dirección […]
Procedimiento para hacer funcionar un sistema de protección de peatones, del 24 de Mayo de 2017, de AUDI AG: Procedimiento para hacer funcionar un sistema de protección de peatones para reducir la gravedad en accidentes en caso de colisiones frontales […]