Método para compensar errores de medición producidos por deformaciones de una bancada de máquina medidora bajo la carga de una pieza, y máquina medidora que opera según dicho método.
Un método de compensar los errores de medición de una máquina medidora (1) que derivan de las deformacionesde una bancada de máquina (2) de la máquina (1) producidas por la carga ejercida por una pieza a medir en labancada de máquina (2),
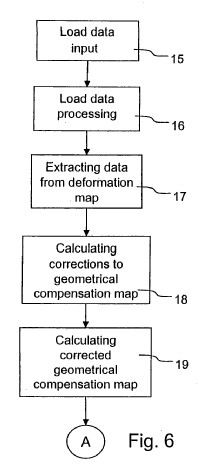
incluyendo un primer paso de adquisición (15) en el que se adquieren datos relativos alpeso de la pieza y las condiciones de retención de la pieza en la bancada de máquina, y un segundo paso de cálculo(16, 17, 18, 19) en el que se calculan valores de corrección dependiendo de dichos datos,
caracterizado porque:
dicho primer paso (15) incluye seleccionar una condición de carga estándar de entre una pluralidad de condicionesde carga estándar; y
dicho segundo paso incluye los pasos de transformar la condición de carga estándar seleccionada a combinacioneslineales de casos de carga básica y calcular valores correlacionados con la deformación de la bancada de máquina(2) bajo la carga de la pieza como una combinación lineal de valores correspondientes resultantes de condiciones decarga básica predeterminadas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2007/000521.
Solicitante: HEXAGON METROLOGY S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTIME DI PIAZZA DELLA LOGGIA, 6 10024 MONCALIERI ITALIA.
Inventor/es: MERLO,Lorenzo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
- G01B5/008 G01B […] › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › que utilizan máquinas de medida de coordenadas.
- G01B7/008 G01B […] › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › que utilizan máquinas de medida de coordenadas.
PDF original: ES-2428219_T3.pdf
Fragmento de la descripción:
Método para compensar errores de medición producidos por deformaciones de una bancada de máquina medidora bajo la carga de una pieza, y máquina medidora que opera según dicho método
Campo técnico La presente invención se refiere a un método de compensar los errores de medición de una máquina medidora que derivan de las deformaciones de la bancada de máquina producidas por la carga ejercida por la pieza a medir en la bancada de máquina, así como a una máquina medidora que opera según dicho método.
Antecedentes de la invención Como es conocido, las máquinas medidoras están provistas por lo general de una base fija o bancada de máquina y una unidad móvil diseñada para mover un cabezal medidor según ejes de coordenadas con respecto a la bancada de máquina en un espacio de medición situado encima de la bancada de máquina. La unidad móvil incluye por lo general un carro principal, que es móvil a lo largo de un eje que es longitudinal con respecto a la bancada de máquina, y uno o más carros soportados por el carro principal, que son móviles a lo largo de respectivos ejes de coordenadas.
La bancada de máquina puede ser monolítica, por ejemplo hecha de granito o hierro fundido, o puede incluir de otro modo un conjunto de componentes rígidamente fijados uno a otro para formar una estructura sustancialmente rígida. La bancada de máquina tiene generalmente dos funciones: soportar y retener la pieza que se mide, y definir una guía para la unidad móvil, y en particular para el carro principal de la máquina, a lo largo de uno de los ejes de coordenadas de la máquina.
Las máquinas medidoras de dicho tipo están provistas por lo general de un sistema para la compensación de errores geométricos, es decir, de los errores de medición que dependen de los defectos de construcción de la máquina (por ejemplo, errores de rectilinearidad de los ejes, defectos de ortogonalidad entre los ejes, etc) .
Las técnicas de compensación corrientes, de naturaleza estrictamente geométrica, no tienen generalmente en cuenta los errores de medición que derivan de las deformaciones elásticas de la bancada de máquina bajo el peso de la pieza a medir. Cuando la pieza a medir tiene un peso considerable (por ejemplo, en el caso de troqueles, piezas de motor, piezas fundidas de grandes dimensiones) dichos errores puede ser no despreciables y poner en peligro la exactitud de la máquina.
Dicha finalidad se logra mediante un método de compensación según la reivindicación 1.
La presente invención se refiere igualmente a una máquina medidora que opera según dicho método definido en la reivindicación 12.
Breve descripción de los dibujos Para una mejor comprensión de la presente invención, a continuación se describe una realización preferida, ofrecida a modo de ejemplo no limitador con referencia a los dibujos anexos, donde:
La figura 1 es una vista en perspectiva esquemática de una máquina medidora que opera según el método de la presente invención.
La figura 2 es una vista esquemática lateral de la máquina de la figura DE-A-102 14 489 describe un método de compensar los errores de medición producidos por deformaciones de una bancada de máquina medidora bajo la carga de una pieza, que tiene las características del preámbulo de la reivindicación 1.
El alcance de la presente invención es idear un método de compensación mejorado que permita tomar en consideración el peso de la pieza, así como su posición y retención en la bancada de máquina, con el fin de calcular valores de corrección.
1, en ausencia de carga.
La figura 3 es una vista esquemática lateral de la máquina de la figura 2, con una representación esquemática de las variaciones geométricas inducidas por la colocación de la pieza en la bancada de máquina.
La figura 4 es un gráfico que ilustra la evolución de las rotaciones de cabeceo y balanceo de un carro principal de la máquina según el recorrido de avance, en presencia de una carga en la bancada de máquina.
La figura 5 es una vista en perspectiva esquemática de la bancada de máquina que ilustra las deformaciones inducidas por el peso de la pieza.
La figura 6 es un diagrama de bloques de un método de compensación.
Y la figura 7 es un diagrama de bloques de un método de medición, que usa un mapa de compensación corregido obtenido usando el método de la invención.
Mejor modo de llevar a la práctica la invención Con referencia a la figura 1, con 1 se designa en conjunto una máquina medidora de pórtico. Se ha de señalar enseguida que el método que forma la materia de la presente invención puede ser usado para la compensación de los errores de máquinas de diferente arquitectura, por ejemplo con brazo horizontal o pilares.
La máquina 1 incluye una bancada de máquina plana 2 provista de una superficie horizontal de trabajo 3 diseñada para soportar un objeto a medir (no ilustrado) , y una unidad 4, que es móvil con respecto a la bancada de máquina 2 a lo largo de ejes de coordenadas.
La unidad 4 incluye un carro de pórtico principal 5 (que por razones de brevedad se designará “pórtico 5”) , que es móvil con respecto a la bancada de máquina 2 a lo largo de un eje horizontal Y. El pórtico 5 está provisto de un par de postes verticales 6 y 7 y un elemento transversal 8 que se extiende entre los postes verticales 6 y 7 en una dirección paralela a un eje horizontal X y perpendicular al eje Y.
La unidad 4 incluye además un carro secundario 9, soportado por el elemento transversal 8 y móvil en el elemento transversal a lo largo del eje X, y una columna de medición 10, soportada por el carro 9 y móvil con respecto a él a lo largo de un eje vertical Z ortogonal a los ejes X e Y.
En un extremo inferior de la columna 10, posiblemente mediante un dispositivo de articulación de dos ejes (no ilustrado) , está una sonda táctil 11.
El pórtico 5, el carro 9, y la columna 10 son móviles bajo el control de respectivos motores eléctricos (no ilustrados) , que, a su vez, son controlados por una unidad de medición y control 12. Ésta última está conectada a transductores de posición (no ilustrados) asociados con los ejes de máquina y a la sonda 11 de manera que reciban de ésta última señales para habilitar la adquisición de las coordenadas instantáneas de los ejes de máquina.
La máquina 1 está equipada con un sistema para compensación de errores geométricos que es conocido en sí mismo. La compensación se lleva a cabo en base a un mapa almacenado 13 determinado en condiciones sin carga mediante un modelo cinemático de la máquina de tipo convencional.
Con referencia a la figura 1, en la superficie de trabajo 3 se identifica una posición de referencia fija REF usada para compensación geométrica de la máquina. También se define un sistema de referencia cartesiano xyz con ejes paralelos a los ejes X, Y, Z de la máquina y origen en el punto REF.
El mapa de compensación se obtiene de forma conocida, y por lo tanto no se describe en detalle, por medios que detectan los parámetros de error en puntos apropiadamente establecidos a una distancia uno de otro a lo largo de los ejes x, y, z. Para cada uno de dichos puntos se realizan mediciones de posición diferenciales con respecto al punto REF, por ejemplo mediante un interferómetro, y mediciones de inclinación diferenciales, por ejemplo usando un inclinómetro fijo situado en el punto REF y un inclinómetro montado en la unidad móvil 4.
Según la presente invención, se propone un método de compensación adicional que también permitirá la determinación de los efectos de la deformación de la bancada de máquina 2 debida a la colocación de la pieza a medir en la bancada de máquina. A efectos metrológicos, dichos efectos dan lugar básicamente a una alteración de la geometría del eje Y, es decir, a variaciones de la configuración del pórtico 5 en función de su posición a lo largo del recorrido de avance. dichas variaciones se resaltan esquemáticamente mediante una comparación de la figura 3, donde la bancada de máquina 2 está cargada con un peso W, con la figura 2, donde la bancada de máquina no está cargada.
Las alteraciones de la geometría del eje Y son similares a las debidas a los errores geométricos de la máquina, que se incluyen en el mapa 13 de compensación geométrica de la máquina 1, determinado en ausencia de carga. Las variaciones de posición debidas al peso, calculado por ejemplo usando un modelo de simulación numérico de elementos finitos, se pueden introducir así como correcciones adicionales en el mapa de compensación existente.
De esta forma se puede obtener la compensación del... [Seguir leyendo]
Reivindicaciones:
1. Un método de compensar los errores de medición de una máquina medidora (1) que derivan de las deformaciones de una bancada de máquina (2) de la máquina (1) producidas por la carga ejercida por una pieza a medir en la bancada de máquina (2) , incluyendo un primer paso de adquisición (15) en el que se adquieren datos relativos al peso de la pieza y las condiciones de retención de la pieza en la bancada de máquina, y un segundo paso de cálculo (16, 17, 18, 19) en el que se calculan valores de corrección dependiendo de dichos datos,
caracterizado porque:
dicho primer paso (15) incluye seleccionar una condición de carga estándar de entre una pluralidad de condiciones de carga estándar; y
dicho segundo paso incluye los pasos de transformar la condición de carga estándar seleccionada a combinaciones 15 lineales de casos de carga básica y calcular valores correlacionados con la deformación de la bancada de máquina (2) bajo la carga de la pieza como una combinación lineal de valores correspondientes resultantes de condiciones de carga básica predeterminadas.
2. El método según la reivindicación 1, caracterizado porque dicho segundo paso incluye el paso (18) de calcular 20 datos de corrección para corregir un mapa de compensación geométrica previamente almacenado (13) .
3. El método según la reivindicación 1 o 2, caracterizado porque las condiciones de carga predeterminadas se definen aplicando una carga preestablecida (F) en respectivos puntos preestablecidos de una superficie de trabajo (3) de dicha bancada de máquina (2) . 25
4. El método según la reivindicación 3, caracterizado porque dichos puntos preestablecidos definen una rejilla en una superficie de trabajo (3) de dicha bancada de máquina (2) .
5. El método según la reivindicación 1, caracterizado porque dichas condiciones de carga estándar incluyen al 30 menos una condición de descansar en tres puntos.
6. El método según la reivindicación 1, caracterizado porque dichas condiciones de carga estándar incluyen al menos una condición de descansar en cuatro puntos en los vértices de un rectángulo orientado paralelo a dos ejes de coordenadas (X, Y) de la superficie de trabajo (3) .
7. El método según la reivindicación 1, caracterizado porque dichas condiciones de carga estándar incluyen al menos una condición de descansar en n puntos con una carga conocida en cada uno de ellos.
8. El método según la reivindicación 5, caracterizado porque dichas condiciones de carga estándar incluyen al
menos una condición de descanso distribuido sobre una zona rectangular orientada paralela a dos ejes de coordenadas (X, Y) de la superficie de trabajo (3) y aproximadas con un número entero de mallas de la rejilla.
9. El método según la reivindicación 5, caracterizado porque dichas condiciones de carga estándar incluyen al
menos una condición de descanso distribuido uniformemente sobre una zona aproximada con un número entero de 45 mallas de dicha rejilla.
10. El método según alguna de las reivindicaciones precedentes, caracterizado porque dichos valores de corrección son calculados en base a un modelo simplificado de la máquina que tiene en cuenta un número reducido de componentes de error.
11. El método según cualquiera de las reivindicaciones 3 a 9 para la compensación de los errores en una máquina medidora cartesiana incluyendo un carro principal (5) móvil con respecto a dicha superficie de trabajo a lo largo de un primer eje (Y) , y al menos un segundo carro (9) soportado por dicho carro principal (5) y móvil con respecto a éste a lo largo de un segundo eje (X) ortogonal al primer eje (Y) y paralelo a dicha superficie de trabajo (3) , caracterizado 55 porque dichos valores de corrección son calculados en base a un modelo simplificado de la máquina que tiene en cuenta solamente las rotaciones de dicho carro principal (5) alrededor de dichos ejes (X, Y) .
12. Una máquina medidora incluyendo una bancada de máquina (2) y una unidad móvil (4) para mover un sensor de medición (11) con respecto a dicha bancada de máquina (2) , caracterizada por incluir un sistema compensador para 60 compensar los errores de medición que derivan de las deformaciones de la bancada de máquina producidas por la carga ejercida por la pieza a medir en la bancada de máquina, operando el sistema compensador según el método de alguna de las reivindicaciones precedentes.
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Punta para un escáner óptico, del 25 de Diciembre de 2019, de 3SHAPE A/S: Una punta para un escáner 3D, en donde la punta comprende: - un armazón de punta , donde una primera parte (605a) del armazón comprende un primer material […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
Dispositivo de medición y procedimiento para la medición por triangulación, del 5 de Junio de 2019, de Pepperl+Fuchs AG: Dispositivo de medición para la medición por triangulación, que presenta - un transmisor de luz para emitir luz de iluminación en un modo de medición, […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de monumento montado en robótica para sistemas de metrología, del 14 de Febrero de 2019, de THE BOEING COMPANY: Un aparato que comprende: uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos está configurado para moverse a una posición respectiva […]
Procedimiento para medir el estado de una vía usando un vehículo en funcionamiento, y vehículo en funcionamiento para medir el estado de una vía, del 9 de Enero de 2019, de NIPPON STEEL CORPORATION: Procedimiento de medición de un estado de una vía (R) usando un vehículo para operaciones comerciales, en el que el vehículo para operaciones comerciales […]
Dispositivo auxiliar y procedimiento para colocar a medida una disposición de medición óptica que se puede montar en un manipulador, del 10 de Enero de 2018, de KUKA ROBOTER GMBH: Dispositivo auxiliar para la colocación a medida de una disposición de medición óptica que puede montarse en un manipulador , […]