MÉTODO DE ACTUACIÓN RESONANTE REALIMENTADO PARA ACTUADORES ELECTROESTÁTICOS MEMS.
Método de actuación resonante realimentado para actuadores electroestáticos MEMS.
La Invención consiste en conectar el actuador electroestático (1) a un circuito electrónico que funcione como sensor o estimador de la distancia o capacidad entre armaduras del actuador (2), obtener la velocidad a la que se mueven las armaduras mediante un derivador de dicha distancia o capacidad (3) y aplicar una señal eléctrica al actuador electroestático (4) que genere una fuerza eléctrica en el mismo sentido que la velocidad. Con esto, un actuador electroestático que inicialmente esté en la posición de reposo oscilará con cada vez mayor amplitud hasta llegar al colapso sin requerir tensiones elevadas de actuación
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802694.
H01H3/22ELECTRICIDAD. › H01ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 3/00 Mecanismos para accionar los contactos (medios de accionamiento o de puesta en movimiento térmicos H01H 37/02). › Disposiciones para conducir una energía al interior del interruptor para accionar el mecanismo de arrastre.
H01H59/00H01H […] › Relés electroestáticos; Relés de adhesión eléctrica.
Fragmento de la descripción:
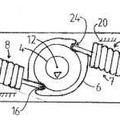
Método de actuación resonante realimentado para actuadores electroestáticos MEMS. Sector de la técnica La presente invención se refiere a un método para reducir la tensión necesaria para hacer colapsar un actuador electroestático. Los actuadores electroestáticos son uno de los dispositivos micro electromecánico (MEMS) más utilizados y actualmente se emplean como interruptores de radiofrecuencia, como varactores (condensadores variables) y como microespejos, de aplicación en el ajuste de láseres, moduladores de luz, y como componente de ciertos tipos de pantallas y proyectores de imagen. Estado de la técnica Desde la aparición del primer actuador electroestático, cerca de 1965, la extensión de estos dispositivos a diversos campos de la industria ha supuesto un significativo avance en el estado de la técnica. Éstos constan de un voladizo o membrana, flexible, que soporta un conductor. Frente a él, y a una cierta distancia (típicamente algunos micrómetros) se coloca otro conductor, de forma que entre los dos forman un pequeño condensador. También pueden construirse actuadores con más de un condensador (más de dos electrodos o armaduras). La deformación del voladizo o membrana trae consigo la aparición de una fuerza mecánica, que denominaremos F m, y que en primera aproximación podemos considerar proporcional al desplazamiento desde la posición de reposo, que denominaremos g 0. Esta fuerza viene dada por la ley de Hooke, según la ecuación: Donde k es la constante elástica del voladizo o membrana, x es el desplazamiento medido desde la posición de reposo (y cuya derivada es la velocidad a la que se mueven las armaduras) y d la distancia entre las armaduras. Por otro lado, al aplicar una tensión V a las armaduras del actuador, aparece una fuerza de atracción electroestática de sentido contrario a la fuerza mecánica de la ecuación anterior. Esta fuerza eléctrica, que denominaremos Fe, viene dada por la ecuación Donde 0 es la permitividad eléctrica y A es el área de las armaduras. Dado que las dos fuerzas van en sentido contrario, la fuerza resultante F sigue la expresión Si derivamos la expresión anterior podemos encontrar la tensión mínima necesaria para hacer colapsar el actuador, esto es, la tensión de pull-in Vpi, Típicamente, la tensión de pull-in está en el orden de las decenas o de voltios, incluso puede llegar al centenar. Esto supone problemas en muchas de las aplicaciones de actuadores electroestáticos puesto que obliga a utilizar elevadores de tensión y/o tecnologías electrónicas capaces de manejar tensiones elevadas, además de ir en contra de las actuales tendencias del mercado de tecnología electrónica de funcionar cada vez con tensiones de alimentación más bajas. Recientemente, para poder reducir la tensión necesaria para hacer colapsar el actuador se ha propuesto la utilización de técnicas de actuación resonante. Éstas requieren, generalmente, reducir el amortiguamiento o la fricción del aire sobre el actuador. Con esto, el factor de calidad Q, dado por la expresión Q = km/b, donde b es el coeficiente de amortiguamiento y m es la masa de la armadura móvil, aumenta significativamente y el comportamiento del actuador al recibir un pulso de fuerza eléctrica (típicamente al aplicar un pulso de tensión), es oscilar ligeramente alrededor de la posición de equilibrio con una frecuencia de oscilación denominada frecuencia de resonancia. 2 ES 2 356 001 A1 Entonces, si se aplica una señal de tensión variable a las armaduras de la misma frecuencia que la frecuencia de resonancia del actuador, de forma que los pulsos de fuerza eléctrica (en los que la tensión variable tiene un valor alto), coincidan en el tiempo con la parte de la oscilación del microsistema en la que la distancia entre las armaduras está disminuyendo, la amplitud de oscilación aumentará progresivamente hasta que las armaduras colapsen. Físicamente, esto supone aplicar una fuerza eléctrica con una magnitud mayor en el sentido que el movimiento o la velocidad. Ejemplos de esta técnica los podemos encontrar en las publicaciones de Ali Nayfeh, Mohammad Younis et al. Dynamic pull-in phenomenon in MEMS resonators de la revista Nonlinear Dynamics, tomo 48, número 1, páginas 153 a 163, año 2007 y Dynamics of MEMS resonators under superharmonic and subharmonic excitations de la revista Journal of Micromechanics and Microengineering, tomo 15, número 10, páginas 1840 a 1847, año 2005; y en las publicaciones de A. Fargas-Marques, J. Casals-Terre y A.M. Shkel Resonant Pull-In Condition in Parallel-Plate Electrostatic Actuators de la revista Journal of Microelectromechanical Systems, tomo 16, número 5, páginas 1044 a 1053, año 2007. Los métodos de actuación resonante conocidos en el estado de la técnica tienen la particularidad de ser en lazo abierto, esto es, aplican la señal de actuación sin conocer la posición, capacidad o distancia entre armaduras del actuador electroestático. Esto supone serias limitaciones en cuanto a que los actuadores sufren de variaciones en su frecuencia de resonancia o de la presencia de múltiples modos o frecuencias de oscilación, cosas que impiden, en la práctica, hacer coincidir con la precisión necesaria la aplicación del nivel alto de la tensión variable con los momentos en los que la distancia entre armaduras disminuye. En los experimentos recogidos en la publicación de Fargas-Marques et al., citada anteriormente, se muestra que las reducciones de tensión que se pueden conseguir con las técnicas de actuación resonante de lazo abierto no son significativas. Descripción de la invención La presente invención trata sobre un método de actuación para actuadores electrostáticos consistente en aplicar una señal de actuación sobre el actuador tal que ésta genere una fuerza eléctrica mayor cuando la derivada de la distancia entre armaduras de dicho actuador sea negativa que la que genera cuando es positiva, o lo que es lo mismo, que genere una fuerza eléctrica mayor cuando la derivada de la capacidad entre armaduras de dicho actuador sea positiva que la que genera cuando es negativa. Este método tiene la particularidad de ser en lazo cerrado, con lo que la distancia entre armaduras o capacidad del actuador es conocida y, por tanto, el método puede ajustarse a las variaciones de la frecuencia de resonancia del actuador para proporcionar siempre una buena sincronización entre la variación de la distancia entre armaduras y la señal de actuación. El primer bloque del método objeto de la invención, cuya realización más simple puede verse en la figura 1, es el estimador o medidor de la capacidad entre armaduras, indicado con el número (2). También puede utilizarse un estimador de la distancia entre armaduras, ya que, en primera aproximación, ambas magnitudes están relacionadas por la expresión Diversos circuitos existen para este propósito como el reportado por los inventores en la revista Analog Integrated Circuits and Signal Processing bajo el título Pulse-Drive and Capacitive Measurement Circuit For MEMS Electrostatic Actuators. El segundo bloque básico, indicado con el número (3), lo constituye el derivador, que obtiene una aproximación de la velocidad a la que se mueven las armaduras. Para obtener dicha velocidad basta con tomar la estimación de capacidad proporcionada por el bloque anterior y derivarla, ya que la ecuación es monotónica respecto al desplazamiento x en todo el dominio físico x > g0 y su derivada tiene signo positivo, esto es, la derivada de la capacidad se comporta de la misma forma que la derivada del desplazamiento o que la velocidad a la que se mueven las armaduras. En caso de utilizar un estimador de la distancia entre armaduras en el bloque (2) en lugar del estimador de capacidad, será necesario invertir el signo de la misma. Finalmente, basta con detectar el signo de esta derivada para aplicar una señal eléctrica (bloque (4)) que genere una fuerza eléctrica que tenga una magnitud mayor cuando este signo sea positivo, es decir, que genere una fuerza eléctrica que tenga una magnitud mayor en el sentido del desplazamiento, o lo que es lo mismo, que tenga una magnitud mayor cuando la capacidad esté aumentando o la distancia entre armaduras disminuyendo. Por ejemplo, basta con unos transistores funcionando como interruptores que apliquen una tensión al actuador cuando dicho signo sea positivo y una tensión inferior (típicamente cero) cuando sea negativo. 3 ES 2 356 001 A1 El funcionamiento de este método es como sigue: cuando la derivada sea positiva, se aplicará una fuerza eléctrica que causará que el actuador se desplace ligeramente de posición hasta un nuevo punto de equilibrio. En ese momento, tanto la velocidad como la derivada de la capacidad se hacen cero y negativas, momento en el que se cambia la tensión a una inferior (o cero), que hace que el actuador se mueva en...
Reivindicaciones:
1. Método de actuación para actuadores electrostáticos consistente en aplicar una señal de actuación sobre el actuador tal que ésta genere una fuerza eléctrica mayor cuando la derivada de la distancia entre armaduras de dicho actuador sea negativa que la que genera cuando es positiva, caracterizado por las siguientes etapas: Estimar o sensar la distancia entre armaduras de dicho actuador Obtener la derivada de dicha distancia Aplicar una señal de actuación en función de dicha derivada. 2. Método de actuación para actuadores electrostáticos consistente en aplicar una señal de actuación sobre el actuador tal que ésta genere una fuerza eléctrica mayor cuando la derivada de la capacidad entre armaduras de dicho actuador sea positiva que la que genera cuando es negativa, caracterizado por las siguientes etapas: Estimar o sensar la capacidad entre armaduras de dicho actuador Obtener la derivada de dicha capacidad Aplicar una señal de actuación en función de dicha derivada. 3. Método de cualquiera de las reivindicaciones anteriores caracterizado porque la señal de actuación que se aplica es función de la propia distancia o capacidad entre armaduras además de sus derivadas. 4. Método de cualquiera de las reivindicaciones anteriores caracterizado porque la señal de actuación es función de, al menos, el signo de la derivada. 5. Método de la reivindicación 4 caracterizado porque el signo de la derivada se obtiene mediante un comparador con histéresis. 6. Método de cualquiera de las reivindicaciones anteriores caracterizado porque se utiliza una o varias etapas de filtrado, lineales o no, en el camino de la señal. 7. El método de cualquiera de las reivindicaciones anteriores caracterizado porque la señal de actuación es una tensión que toma, al menos, dos valores, uno alto, y otro bajo o cero. 8. El método de cualquiera de las reivindicaciones anteriores caracterizado porque la estimación o sensado no se realiza de forma continua, sino en determinados intervalos de tiempo. 9. El método de la reivindicación 8 caracterizado porque la estimación o sensado se realiza coincidiendo con uno o varios de los valores que toma la señal de actuación. 10. El método de cualquiera de las reivindicaciones anteriores caracterizado porque el actuador electrostático es, o se utiliza como interruptor de radiofrecuencia. 11. El método de cualquiera de las reivindicaciones anteriores caracterizado porque el actuador electrostático es, o se utiliza como acelerómetro o sensor inercial. 12. El método de cualquiera de las reivindicaciones anteriores caracterizado porque el actuador electrostático es, o se utiliza como inclinómetro. 13. El método de cualquiera de las reivindicaciones anteriores caracterizado porque el actuador electrostático es, o se utiliza como giróscopo. ES 2 356 001 A1 6 ES 2 356 001 A1 7 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
UN MÉTODO Y UN MEDIO PARA CONMUTAR CIRCUITOS DE MATRICES MEMS Y DE UN REPARTIDOR PRINCIPAL AUTOMÁTICO, del 18 de Noviembre de 2011, de HUAWEI TECHNOLOGIES CO., LTD.: Un método para la conmutación de líneas en una matriz MEMS , que comprende: cortar la corriente de alimentación a la matriz MEMS mediante el […]
Dispositivo de aparamenta eléctrica de limitación de alta velocidad, del 27 de Mayo de 2019, de ABB SCHWEIZ AG: Dispositivo (1; 1') de aparamenta eléctrica que comprende:
una disposición (3; 3') de electrodo fijo,
una disposición (5; 5') de electrodo móvil que presenta una […]
Accionador de disparo para interruptor de circuito de alimentación eléctrica, del 10 de Enero de 2018, de LSIS Co., Ltd: Un accionador de disparo para un interruptor de un circuito de alimentación eléctrica, caracterizado por que el accionador de disparo comprende:
[…]
Dispositivo de bloqueo para conmutador, del 28 de Diciembre de 2016, de Thomas & Betts International, LLC: Un conjunto que comprende un dispositivo de bloqueo de seguridad para conmutadors y un motor eléctrico para el funcionamiento de la conmutador, comprendiendo el […]
Dispositivo y procedimiento de control de una señal de mando destinada a un seccionador, del 29 de Abril de 2015, de SOCIETE DAUPHINOISE DE CONSTRUCTIONS ELECTRO-MECANIQUES: Dispositivo de control de por lo menos una señal analógica de mando (Vil, Vo, Vf, Vdco, Vdcf) de tipo alternativo o continuo generada a partir de una red eléctrica […]
Dispositivo de conmutación eléctrica con mecanismo de accionamiento ultrarrápido e interruptor híbrido que comprende un dispositivo de este tipo, del 8 de Abril de 2015, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Dispositivo de conmutación eléctrica con mecanismo de accionamiento ultrarrápido de apertura de contactos eléctricos que comprende:
- un disparador electrodinámico […]
Dispositivo conmutador, del 22 de Agosto de 2012, de ABB OY: Un dispositivo conmutador que comprende un bastidor , en el que está instalado un actuador adaptadopara girar un eje principal del dispositivo conmutador […]
Contador de voltaje medio multifase, del 24 de Mayo de 2012, de ABB TECHNOLOGY AG: Contactor de voltaje medio multifase , que comprende:
- para cada fase, un contacto fijo y un contacto móvil asociado posicionable […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Dispositivo conmutador, del 22 de Agosto de 2012, de ABB OY: Un dispositivo conmutador que comprende un bastidor , en el que está instalado un actuador adaptadopara girar un eje principal del dispositivo conmutador […]
Dispositivo conmutador, del 22 de Agosto de 2012, de ABB OY: Un dispositivo conmutador que comprende un bastidor , en el que está instalado un actuador adaptadopara girar un eje principal del dispositivo conmutador […] Contador de voltaje medio multifase, del 24 de Mayo de 2012, de ABB TECHNOLOGY AG: Contactor de voltaje medio multifase , que comprende:
- para cada fase, un contacto fijo y un contacto móvil asociado posicionable […]
Contador de voltaje medio multifase, del 24 de Mayo de 2012, de ABB TECHNOLOGY AG: Contactor de voltaje medio multifase , que comprende:
- para cada fase, un contacto fijo y un contacto móvil asociado posicionable […]