MEJORAS INTRODUCIDAS EN LA PATENTE DE INVENCION P200800447 POR SISTEMA DE PILOTO AUTOMATICO EVASIVO PARA EMBARCACIONES.
Mejoras introducidas en la Patente de invención P200800447 por sistema de piloto automático evasivo para embarcaciones.
Comprende un dispositivo de piloto automático (2) que actúa, al menos, sobre los controles (3) de rumbo de la embarcación (6), y que comprende un módulo electrónico de evasión (4) susceptible de generar órdenes de maniobra evasiva para el dispositivo de piloto automático (2) en caso de darse un rumbo de colisión; así como un radar (7) conectado a dicho módulo electrónico de evasión (4) en orden a detectar la existencia de obstáculos (5, 5'') que generen rumbos de colisión, así como comprende un telémetro (16) láser y un sistema SIA (17), de apoyo al radar (7), y unos medios de detección (18) de los grados de giro del motor, así como unos sensores de medida (19) de las revoluciones del motor
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802936.
Solicitante: BENDITO VALLORI,JUAN MARIANO.
Nacionalidad solicitante: España.
Provincia: ILLES BALEARS.
Inventor/es: BENDITO VALLORI,JUAN MARIANO.
Fecha de Solicitud: 17 de Octubre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 26 de Enero de 2011.
Clasificación Internacional de Patentes:
- B63B49/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Disposiciones de instrumentos náuticos o ayudas de navegación.
- G01S13/93B
- G05D1/02C
Clasificación PCT:
- B63B49/00 B63B […] › Disposiciones de instrumentos náuticos o ayudas de navegación.
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Descripción:
Mejoras introducidas en la patente de invención nº P 200800447 por: "Sistema de piloto automático evasivo para embarcaciones".
Objeto de la invención
La presente invención pertenece al campo de la navegación marina y describe una serie de mejoras introducidas en la patente de invención 200800447 denominada "Sistema de piloto automático evasivo para embarcaciones".
Antecedentes de la invención
En la solicitud de patente de invención española P200800447 se consigue el desarrollo de los medios necesarios para resolver el inconveniente de la ausencia de unos medios de variar el rumbo de una embarcación con el fin de evitar colisiones, por medio de un sistema de piloto automático evasivo.
Dicho sistema de piloto automático evasivo para una embarcación portante comprende un dispositivo de piloto automático que actúa sobre los controles de rumbo y de velocidad de dicha embarcación portante.
Comprende además un módulo electrónico de evasión, conectado al piloto automático, susceptible de identificar rumbos de colisión y de generar órdenes de maniobra evasiva para el dispositivo de piloto automático; y un radar conectado a dicho módulo electrónico de evasión para detectar la existencia de obstáculos que generan los rumbos de colisión, e informar de dicha existencia al módulo electrónico.
La detección de un obstáculo y de un rumbo de colisión activa en el módulo electrónico de evasión órdenes de control para el dispositivo de piloto automático, que modifica el rumbo de la embarcación portante para evitar la colisión, restableciéndolo posteriormente, calculando según los parámetros de seguridad introducidos si tiene vía libre de naves u obstáculos que puedan producir colisión o incluso varada.
Descripción de la invención
Las mejoras que se proponen en este certificado de adición de la patente de invención P200800447 se refieren a la incorporación adicional de un sistema de de identificación automática (SIA, del inglés AIS, Automatic Identification System), así como de un telémetro láser, como sistemas complementarios al radar.
Tanto el sistema SIA como el telémetro láser se encuentran conectados al módulo electrónico de evasión, que a su vez está conectado al radar.
El sistema SIA permite a una embarcación portante comunicar a otras embarcaciones su posición, así como otros datos relevantes, como pueden ser datos identificativos, para que el resto de embarcaciones conozcan la proximidad de un obstáculo y sepan que se trata de una embarcación y puedan identificarla. La aplicación más importante del sistema SIA es evitar colisiones entre embarcaciones, puesto que a partir del conocimiento de la presencia de otra embarcación, es posible variar la trayectoria o hacer uso de señales visuales o acústicas.
Un telémetro láser es un dispositivo que permite averiguar la distancia entre la embarcación portante y un obstáculo, mediante un rayo láser.
Adicionalmente, se propone la incorporación de medios de detección de los grados de giro del timón y de medios de medida de las revoluciones del motor, conectados al módulo electrónico de evasión para transmitir el rumbo de la embarcación y el régimen de giro del motor.
Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
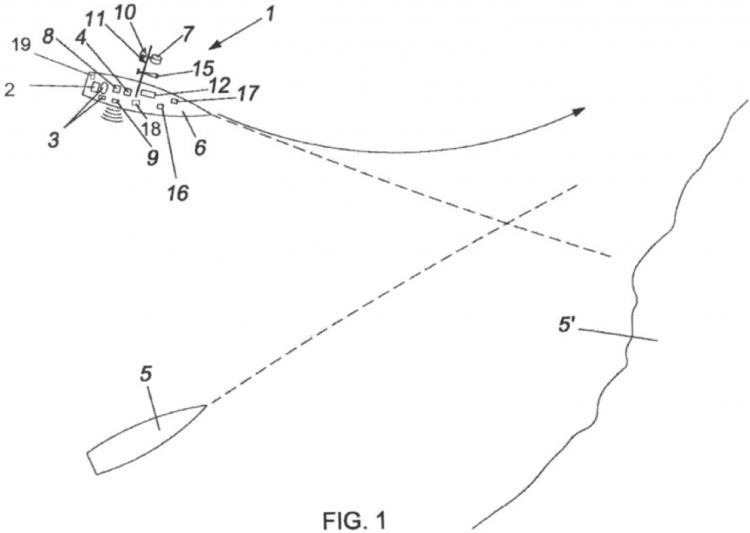
Figura 1.- Muestra una vista esquemática de una embarcación portadora que equipa el sistema de la invención, cuyo rumbo presenta riesgos de colisión con otra embarcación y con la costa.
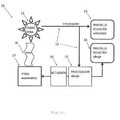
Figura 2.- Muestra una vista esquemática de una embarcación portadora que equipa el sistema de la invención.
Realización preferente de la invención
El sistema (1) de piloto automático evasivo para embarcaciones portadoras (6) de la invención comprende un dispositivo de piloto automático (2) que actúa, en este ejemplo de la invención, al menos, sobre los controles (3) de rumbo y velocidad de la embarcación (6) portadora.
Este dispositivo de piloto automático (2) está conectado a un módulo electrónico de evasión (4), que implementa la electrónica y la programación necesarias para identificar que se da un rumbo de colisión, y generar órdenes de maniobra evasiva para el dispositivo de piloto automático (2) en este caso. La detección de obstáculos (5, 5') puede ser estática y dinámica, esto es, puede ser capaz de detectar rumbos de colisión con objetos estáticos, u objetos en movimiento en función del rumbo y velocidad de los mismos.
La detección de los obstáculos (5, 5') se realiza automáticamente, principalmente por medio de un radar (7) asociado al módulo electrónico de evasión (4), si bien se propone mediante las presentes mejoras que el radar (7) se complemente con la ayuda de un telémetro (16) láser para detectar la distancia a la que se encuentra el obstáculo (5, 5') y, en su caso, de sistemas AIS (17) de detección automática, para enviar y recibir señales de otras embarcaciones y poder identificarlas.
Una vez detectado el riesgo de colisión, el módulo electrónico de evasión (4) determina los parámetros de rumbo que se deben tomar para evitar dicha colisión. Para calcular dichos parámetros de rumbo, el módulo electrónico de evasión considera la información recibida a partir de los sensores de medida (19) de las revoluciones del motor (tacómetro) y de los medios de detección (18) de los grados girados por el timón, así como la velocidad de la embarcación portante (6).
La programación del módulo electrónico (4) de evasión permite esperar la maniobra de la otra embarcación u obstáculo móvil (5) cuando la embarcación portante (6) tiene preferencia de paso, antes de generar las instrucciones para la maniobra evasiva.
La invención puede incorporar un sistema de posicionamiento geográfico global (8) asociado al módulo electrónico de evasión (4), tal como un GPS, para determinar el rumbo propio. Dicho sistema de posicionamiento geográfico global (8) puede además incorporar cartografía, lo que permitirá al módulo electrónico de evasión (4), determinar la existencia de obstáculos geográficos (5) (acantilados, arrecifes, etc.)
El sistema (1) también puede comprender una sonda (9) asociada al módulo electrónico de evasión (4), que le informará de la existencia de fondos u obstáculos sumergidos.
Del mismo modo, el sistema (1) de la invención puede comprender una veleta (10) y un anemómetro (11) asociados al módulo electrónico de evasión (4), para conocer la dirección, fuerza y velocidad del viento.
El sistema (1) de la invención también comprende un plotter (12) cartográfico asociado al módulo electrónico de evasión (4), para trazar los rumbos originales y/o los rumbos de las maniobras de evasión.
También puede comprender un indicador de actuación evasiva, no representado, tal como un emisor acústico y/o un indicador luminoso, que avise del inicio y del fin de dicha maniobra. También puede comprender una conexión exterior para activación del sistema de señales acústicas (15) de la embarcación portadora, según las normas internacionales.
De todas formas, el control definitivo de la embarcación por parte del tripulante queda asegurado mediante la disposición de un mando de parada de emergencia, así como un mando de activación y desactivación, no representados.
El sistema de la invención también ha previsto la implementación de un actuador, no representado, sobre los controles de marcha y velocidad, actuador que estará convenientemente asociado al módulo electrónico de evasión (4) y que se encargará del control de marcha y velocidad.
Reivindicaciones:
1. Mejoras introducidas en la patente de invención P200800447 por "Sistema de piloto automático evasivo para embarcaciones portadoras (6)", que comprende un dispositivo de piloto automático (2) que actúa, al menos, sobre los controles (3) de rumbo de la embarcación y que comprende un módulo electrónico de evasión (4) susceptible de generar órdenes de maniobra evasiva para el dispositivo de piloto automático (2) en caso de darse un rumbo de colisión; así como un radar (7) conectado a dicho módulo electrónico de evasión (4) en orden detectar la existencia de obstáculos (5, 5') que generan rumbos de colisión, caracterizado porque comprende adicionalmente:
- un telémetro (16) láser de apoyo al radar (7),
- un sistema AIS (17) de apoyo al radar (7), y
- medios de detección (18) de las revoluciones del motor de la embarcación portadora (6),
- sensores de medida (19) de los grados de giro del timón de la embarcación portadora (6).
2. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según reivindicación 1, caracterizado porque adicionalmente comprende un sistema de posicionamiento geográfico global (8) asociado al módulo electrónico de evasión (4) en orden a facilitar a dicho módulo electrónico de evasión (4) la posición y rumbo de la embarcación portadora (6).
3. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según reivindicación 2 caracterizado porque el sistema de posicionamiento geográfico global (8) implementa cartografías, en orden a informar al módulo electrónico de evasión (4) de la existencia de obstáculos geográficos (5').
4. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque incorpora un actuador sobre los controles de marcha y velocidad de la embarcación (6).
5. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque adicionalmente comprende una sonda (9) asociada al módulo electrónico de evasión (4), en orden a informar a dicho modulo electrónico de evasión (4) de la existencia de obstáculos sumergidos.
6. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque adicionalmente comprende una veleta (10) y un anemómetro (11) asociados al módulo electrónico de evasión (4), en orden a informar a dicho módulo electrónico de evasión (4) de la velocidad, fuerza y dirección del viento.
7. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque adicionalmente comprende un plotter (12) cartográfico asociado al módulo electrónico de evasión (4), en orden a trazar los rumbos originales y/o los rumbos de las maniobras de evasión.
8. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque adicionalmente comprende un indicador de actuación evasiva.
9. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según reivindicación 8 caracterizado porque el indicador de actuación evasiva se encuentra seleccionado entre:
- Un emisor acústico
- Un indicador luminoso.
10. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones portadoras (6)" según cualquiera de las reivindicaciones anteriores caracterizado porque incorpora una conexión de activación del sistema de señales acústicas (15) de la embarcación (6) para aviso de las maniobras evasivas.
11. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones (6) portadoras" según cualquiera de las reivindicaciones anteriores caracterizado porque incorpora un mando de activación y desactivación.
12. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones (6) portadoras" según cualquiera de las reivindicaciones anteriores caracterizado porque incorpora un mando de parada de emergencia.
13. Mejoras introducidas en la patente de invención P200800447 por un "Sistema de piloto automático evasivo para embarcaciones (6) portadoras" según cualquiera de las reivindicaciones anteriores caracterizado porque el módulo electrónico de evasión (4) implementa un algoritmo de toma de decisiones según las normas internacionales de navegación.
Patentes similares o relacionadas:
Un transporte, del 1 de Julio de 2020, de Anemoi Marine Technologies Limited: Un sistema para usarse en una embarcación (100a), comprendiendo el sistema: un rotor Flettner ; en el que el sistema comprende además: […]
Procedimiento para el atraque operado a motor, del 22 de Mayo de 2019, de Kuhn, Andreas: Procedimiento para el atraque operado a motor con un barco , en particular un yate, en un punto de atraque en una zona de atraque, donde en una etapa de elaboración […]
Monitorización de eventos deportivos, del 2 de Agosto de 2017, de Catapult Group International Pty Ltd: Un sistema para la adquisición de datos para su uso en eventos deportivos que incorpora: un sensor de posición global para obtener datos de posicionamiento […]
SENSOR DE VIENTO APARENTE PARA EMBARCACIONES, del 27 de Febrero de 2017, de ASIAIN ASORENA, David: Sensor de viento aparente para embarcaciones , del tipo que comprenden una estructura en la que se encuentran montados un anemómetro […]
SISTEMA DE SERVICIOS MÚLTIPLES A TRAVÉS DE SENSORES CON UNIDAD DE CONTROL CENTRAL PARA EMBARCACIONES, del 1 de Septiembre de 2016, de DE LA SERNA PARADA, Alberto: Sistema de servicios múltiples a través de sensores con unidad de control central para embarcaciones, el cual contiene una unidad de control central y un conjunto […]
 SISTEMA DE MEDIDA Y ACTUACION FRENTE OLEAJE MEDIANTE CORREDERA, del 20 de Febrero de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: Sistema de medida y actuación frente oleaje mediante corredera.
Comprende un elemento sensor-corredera cuya señal medida contiene, a la vez, información sobre la velocidad […]
SISTEMA DE MEDIDA Y ACTUACION FRENTE OLEAJE MEDIANTE CORREDERA, del 20 de Febrero de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: Sistema de medida y actuación frente oleaje mediante corredera.
Comprende un elemento sensor-corredera cuya señal medida contiene, a la vez, información sobre la velocidad […]
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS, del 30 de Enero de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: 1. Dispositivo móvil de seguridad para amarradores portuarios, caracterizado porque comprende: - un distanciómetro láser configurado para realizar mediciones periódicas […]
 DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS, del 19 de Septiembre de 2012, de UNIVERSIDAD POLITECNICA DE MADRID: El dispositivo móvil de seguridad para amarradores portuarios es una invención que analiza si existe riesgo en la maniobra de atraque de un buque, mediante la medición de […]
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS, del 19 de Septiembre de 2012, de UNIVERSIDAD POLITECNICA DE MADRID: El dispositivo móvil de seguridad para amarradores portuarios es una invención que analiza si existe riesgo en la maniobra de atraque de un buque, mediante la medición de […]