MEJORAS EN MANIPULADORES PARA ACCIONAMIENTOS AUTOMATIZADOS.
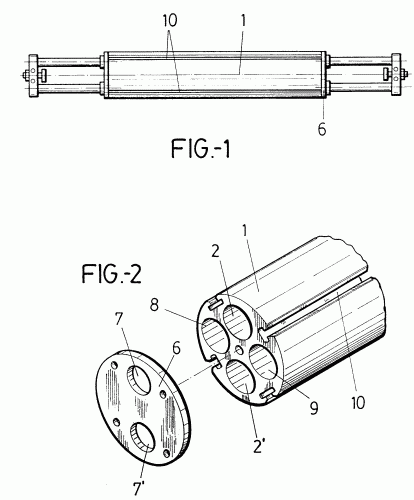
MEJORAS EN MANIPULADORES PARA ACCIONAMIENTOS AUTOMATIZADOS, CONCRETAMENTE EN MANIPULADORES PROVISTOS DE UN CUERPO CONVENIENTEMENTE FIJADO A UNA BRIDA O SOPORTE Y EN EL QUE JUEGAN DOS EMBOLOS,
CUYOS VASTAGOS EMERGEN POR LOS EXTREMOS DEL CITADO CUERPO Y, CONVENIENTEMENTE SOLIDARIZADOS ENTRE SI, RECIBEN POR UNO DE LOS EXTREMOS Y DIRECTA O INDIRECTAMENTE AL OBJETO A MANIPULAR, ESENCIALMENTE CARACTERIZADAS PORQUE EL CITADO CUERPO ES UN CUERPO DE EXTRUSION A BASE DE ALUMINIO, CILINDRICO, EN CUYO SENO SE ESTABLECEN UNA PAREJA DE ALOJAMIENTOS LONGITUDINALES TAMBIEN CILINDRICOS, PARA LOS CORRESPONDIENTES EMBOLOS, PARALELOS AL EJE DEL CUERPO Y EN OPOSICION DIAMETRAL CON RESPECTO A ESTE ULTIMO, ASI COMO OTROS DOS ORIFICIOS LONGITUDINALES, QUE PUEDEN SER DE SECCION CIRCULAR O DE CUALQUIER OTRA, QUE SE CIERRAN MEDIANTE TAPETAS COMPLEMENTARIAS FIJABLES POR CUALQUIER MEDIO A LOS EXTREMOS DEL CUERPO, UNO DE LOS CUALES ESTA DESTINADO A RECIBIR A UN AMORTIGUADOR, MIENTRAS QUE EL OTRO CONSTITUYE EL ALOJAMIENTO DE RESERVA, A LA VEZ QUE AMBOS ORIFICIOS ALIGERAN EL CUERPO EXTRUSIONADO.
Tipo: Resumen de patente/invención.
Solicitante: INFORMATICA Y ROBOTICA INDUSTIAL, S.A. IRI, S.A.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: CARO ROQUETA, EDUARDO.
Fecha de Solicitud: 29 de Diciembre de 1989.
Fecha de Publicación: .
Fecha de Concesión: 15 de Enero de 1991.
Clasificación Internacional de Patentes:
- B25J9/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]