MECANISMO DE CONVERSIÓN DE MOVIMIENTO GIRATORIO/LINEAL.
Un mecanismo de conversión de movimiento giratorio/lineal que incluye un eje (1) que tiene una rosca (1a) en una superficie circunferencial exterior,
una tuerca (2) que tiene una rosca (2a) en una superficie circunferencial interior, y un rodillo (3) dispuesto entre la superficie circunferencial exterior del eje (1) y la superficie circunferencial interior de la tuerca (2), presentando el rodillo (3) una rosca (3a) roscada a las roscas (1a, 2a) del eje (1) y la tuerca (2), convirtiendo el mecanismo de conversión de movimiento giratorio/lineal el giro de uno de los ejes (1) y la tuerca (2) en movimiento lineal del otro, comprendiendo además el mecanismo: Un primer engranaje (3b) proporcionado en un tramo del rodillo (3); Un segundo engranaje (1b) proporcionado en un tramo del eje (1), estando el segundo engranaje (1b) engranado con el primer engranaje (3b); y Un tercer engranaje (4a) proporcionado en un tramo de la tuerca (2), estando el tercer engranaje (4a) engranado con el primer engranaje (3b), estando el mecanismo caracterizado por el hecho de que el segundo engranaje (1b) se proporciona en un extremo del eje (1) en la dirección axial teniendo sensiblemente el mismo diámetro exterior que el eje (1)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2006/317028.
Solicitante: TOYOTA JIDOSHA KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 1, TOYOTA-CHO TOYOTA-SHI, AICHI 471-8571 JAPON.
Inventor/es: KINOSHITA,Yasuo , HAMAGURI,Toshiaki , TSUZUKI,Motohiro , KASAHARA,Koji.
Fecha de Publicación: .
Fecha Solicitud PCT: 23 de Agosto de 2006.
Clasificación Internacional de Patentes:
- F16H25/22C2
Clasificación PCT:
- F16H25/22 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › con bolas, rodillos u órganos similares entre piezas que funcionan en conjugación; Elementos esenciales para utilización de estos órganos.
Países PCT: Alemania, España, Francia, Reino Unido, Italia.
Fragmento de la descripción:
CAMPO DE LA TÉCNICA
La presente invención se refiere a un mecanismo de conversión de movimiento giratorio/lineal que convierte un movimiento giratorio en lineal o un movimiento lineal en giratorio. 5
ANTECEDENTES DE LA INVENCIÓN
Como este tipo de mecanismo de conversión de movimiento giratorio/lineal, por ejemplo, es conocido un mecanismo que utiliza un tornillo de rodillos descrito en la patente japonesa de dominio público nº 10-196757.
Este mecanismo está provisto de un eje que tiene una rosca en la superficie circunferencial exterior, una tuerca que tiene una rosca en la superficie circunferencial interior, y rodillos interpuestos entre la superficie 10 circunferencial exterior del eje y la superficie circunferencial interior de la tuerca y roscados con cada una de las roscas anteriores. La tuerca y los rodillos están engranados entre sí con un engranaje. Cuando la tuerca anterior gira, los rodillos giran y giran alrededor de un eje, es decir, realizan un movimiento sol-planeta, mientras que el eje roscado con la rosca de los rodillos hace un movimiento lineal en la dirección axial.
Un avance en el anterior mecanismo de conversión de movimiento giratorio/lineal (carrera de un eje por giro 15 de una tuerca) está determinado por el número de roscas proporcionadas en el eje, tuerca y rodillos, respectivamente y el ratio desmultiplicador del mecanismo de conversión de movimiento giratorio/lineal. Entre ellos, el ratio desmultiplicador se determina por un ratio de diámetros efectivos de las respectivas roscas, aunque los diámetros efectivos reales de las respectivas roscas pueden variar debido a la precisión de mecanizado de la rosca o pueden cambiarse debido a la abrasión en la superficie de contacto entre las roscas a ser roscadas entre sí, y un 20 ratio desmultiplicador constante y estable es difícil de obtenerse.
También, en el mecanismo descrito en el documento anterior, ya que la posición de un eje central del eje con respecto al eje central de la tuerca y la posición del eje de revolución de los rodillos con respecto al eje central de la tuerca se determinan al engranar las roscas, el eje central del eje y el eje de revolución de los rodillos se desplazan fácilmente desde el eje central de la tuerca. Si el eje central del eje o el eje de revolución de los rodillos se 25 desplaza del eje central de la tuerca de esta manera, la posición de la superficie de contacto de cada rosca cambia, lo que provoca un cambio en el diámetro efectivo real de cada rosca y un ratio desmultiplicar constante y estable no puede obtenerse en este caso tampoco.
Si un ratio desmultiplicador constante y estable no puede obtenerse en un mecanismo de conversión de movimiento giratorio/lineal, de este modo, resulta difícil conseguir el avance anterior según un valor diseñado, 30 deteriorando la precisión de avance. En la patente europea EP 1 918 612 A1, que es un documento según el artículo 54(3) del EPC para la presente solicitud y ha sido presentada antes pero publicada después de la fecha de prioridad de la presente solicitud, describe un mecanismo de conversión de movimiento giratorio/lineal que comprende un eje, una tuerca y varios rodillos dispuestos entre el eje y la tuerca. El eje, la tuerca y los rodillos comprenden roscas y engranajes que engranan entre las correspondientes roscas y engranajes, respectivamente. Las roscas y 35 engranajes de la tuerca están directamente formadas en la superficie circunferencial interior de la tuerca.
La patente europea EP 0 157 747 A1 describe un mecanismo de conversión de movimiento giratorio/lineal de acuerdo con el preámbulo de la reivindicación 1.
DESCRIPCIÓN DE LA INVENCIÓN
Por consiguiente, es un objetivo de la presente invención proporcionar un mecanismo de conversión de 40 movimiento giratorio/lineal que mejora la precisión de avance.
Para conseguir el objetivo anterior, se proporciona un mecanismo de conversión de movimiento giratorio/lineal de acuerdo con la reivindicación 1.
La figura 1 es una vista en sección transversal que muestra de forma esquematizada un mecanismo de conversión de movimiento giratorio/lineal de acuerdo con una realización de la presente invención; 45
La figura 2 es un diagrama esquemático que muestra una estructura de un rodillo de la realización;
La figura 3 es un diagrama esquemático (vista sobre la flecha A de la figura 1) que muestra la estructura del mecanismo de conversión de movimiento giratorio/lineal que se ve en una dirección de la flecha A en la figura 1;
La figura 4 es un gráfico que muestra una precisión de la carrera del mecanismo de conversión de movimiento giratorio/lineal de acuerdo con la realización;
La figura 5 es una vista en sección transversal que muestra de forma esquematizada un mecanismo de conversión de movimiento giratorio/lineal que no forma parte de la invención de acuerdo con la reivindicación 1;
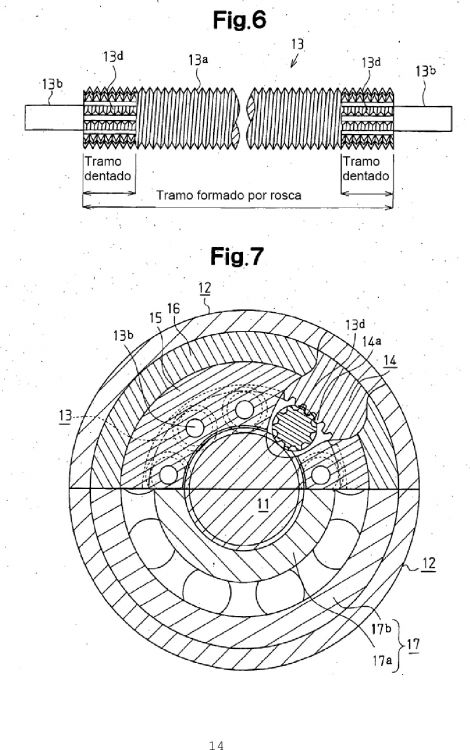
La figura 6 es un diagrama esquemático que muestra la estructura de un rodillo de acuerdo con la figura 5; 5 y
La figura 7 es una vista en sección transversal tomada a lo largo de la línea B-B de la figura 5.
MEJOR MODO PARA LLEVAR A CABO LA INVENCIÓN
Un mecanismo de conversión de movimiento giratorio/lineal de acuerdo con una realización de la presente invención se describirá a continuación con referencia a las figuras 1 a 4. 10
La figura 1 es una vista en sección transversal que se ve en la dirección axial que muestra el mecanismo de conversión de movimiento giratorio/lineal de acuerdo con la realización.
Tal como se muestra en la figura 1, el mecanismo de conversión de movimiento giratorio/lineal comprende un eje 1 que tiene una rosca en su superficie circunferencial exterior, una tuerca 2 proporcionada en el lado exterior del eje 1 y que tiene una rosca en su superficie circunferencial interior, una pluralidad de rodillos 3 interpuestos entre 15 la superficie circunferencial exterior del eje 1 y la superficie circunferencial interior de la tuerca 2 y que tiene una rosca roscada con la rosca del eje 1 y la rosca de la tuerca 2, engranajes anulares 4 proporcionados en la superficie circunferencial interior de la tuerca 2. El mecanismo de conversión de movimiento giratorio/lineal se refiere con frecuencia como un mecanismo de tornillo-rodillo que convierte el movimiento giratorio de la tuerca 2 en el movimiento lineal del eje 1. Los respectivos componentes se describirán seguidamente con detalle. 20
Una rosca externa 1a está formada en la superficie circunferencial exterior del eje 1, y la rosca externa 1a es, por ejemplo, una rosca de mano derecha múltiple.
En un extremo del eje 1 en la dirección axial, se proporciona un engranaje de dientes rectos 1b que presenta sensiblemente el mismo diámetro exterior que el del eje 1. El engranaje de dientes rectos 1b está hecho de un elemento separado del eje 1, y el engranaje de dientes rectos está fijado al eje 1 al ajustar la superficie 25 circunferencial interior del engranaje de dientes rectos 1b en una prolongación proporcionada en el extremo del eje 1. Los mismos dientes que los del engranaje de dientes rectos 1b pueden formarse directamente en la superficie circunferencial exterior del eje 1. El engranaje de dientes rectos 1b forma un segundo engranaje.
La figura 2 muestra la forma del rodillo 3. Tal como se muestra en las figuras 1 y 2, cada rodillo 3 tiene una forma cilíndrica y una rosca 3a roscada con la rosca externa 1a del eje 1 está formada en toda la superficie 30 circunferencial exterior en su dirección axial. La rosca 3a es, por ejemplo, una rosca de mano izquierda simple. También, una pluralidad de (nueve en esta realización) rodillos 3 se disponen con un paso constante que envuelve la superficie circunferencial exterior del eje 1. Además, se proporcionan un engranaje de dientes rectos 3b y un engranaje de dientes rectos 3c en una parte de cada rodillo 3.
El engranaje de dientes rectos 3b está integralmente formado en la superficie circunferencial exterior del 35 extremo en el lado opuesto al engranaje de dientes rectos 1b del eje 1 en ambos extremos de cada rodillo 3 en la dirección axial de modo que engrana con el engranaje de dientes rectos 1b. Además, el engranaje de dientes rectos 3b se proporciona correspondiendo a un rango donde el engranaje de dientes rectos 1b del eje 1 se mueve relativamente en la dirección axial con respecto al rodillo...
Reivindicaciones:
1. Un mecanismo de conversión de movimiento giratorio/lineal que incluye un eje (1) que tiene una rosca (1a) en una superficie circunferencial exterior, una tuerca (2) que tiene una rosca (2a) en una superficie circunferencial interior, y un rodillo (3) dispuesto entre la superficie circunferencial exterior del eje (1) y la superficie 5 circunferencial interior de la tuerca (2), presentando el rodillo (3) una rosca (3a) roscada a las roscas (1a, 2a) del eje (1) y la tuerca (2), convirtiendo el mecanismo de conversión de movimiento giratorio/lineal el giro de uno de los ejes (1) y la tuerca (2) en movimiento lineal del otro, comprendiendo además el mecanismo:
Un primer engranaje (3b) proporcionado en un tramo del rodillo (3);
Un segundo engranaje (1b) proporcionado en un tramo del eje (1), estando el segundo engranaje (1b) 10 engranado con el primer engranaje (3b); y
Un tercer engranaje (4a) proporcionado en un tramo de la tuerca (2), estando el tercer engranaje (4a) engranado con el primer engranaje (3b),
estando el mecanismo caracterizado por el hecho de que el segundo engranaje (1b) se proporciona en un extremo del eje (1) en la dirección axial teniendo sensiblemente el mismo diámetro exterior que el eje (1). 15
2. El mecanismo según la reivindicación 1, en el que el primer engranaje (3b) se proporciona correspondiendo a un rango donde el segundo engranaje (1b) se mueve de forma relativa respecto al rodillo (3).
3. El mecanismo según la reivindicación 1 o 2, en el que el primer engranaje (3b) está formado integralmente con el rodillo (3).
4. El mecanismo según la reivindicación 1 o 2, en el que el primer engranaje está formado por un elemento 20 separado del rodillo y está montado con el rodillo.
5. El mecanismo según cualquiera de las reivindicaciones 1 a 4, en el que el primer engranaje (3b) es uno de un par de primeros engranajes (3b, 3c) proporcionado cada uno de ellos en un extremo del rodillo (3) en una dirección axial.
6. El mecanismo según cualquiera de las reivindicaciones 1 a 5, en el que la tuerca (2) presenta un 25 engranaje anular (4) sobre la superficie circunferencial interior, y en el que el engranaje anular (4) tiene dientes internos que forman el tercer engranaje (4a).
7. El mecanismo según cualquiera de las reivindicaciones 1 a 6, en el que el segundo engranaje está formado integralmente con el eje.
8. El mecanismo según cualquiera de las reivindicaciones 1 a 6, en el que el segundo engranaje (1b) está 30 formado por un elemento separado del eje (1) y está montado con el eje (1).
9. El mecanismo según cualquiera de las reivindicaciones 1 a 8, en el que el segundo engranaje (1b) se proporciona en un extremo del eje (1) en una dirección axial.
10. El mecanismo según cualquiera de las reivindicaciones 1 a 9, en el que el primer, segundo y tercer engranajes son engranajes de dientes rectos (3b, 1b, 4a). 35
11. El mecanismo según cualquiera de las reivindicaciones 1 a 10, en el que la rosca (1a) del eje (1) es una rosca múltiple, la rosca (3a) del rodillo (3) es una rosca simple, y la rosca (2a) de la tuerca (2) es una rosca múltiple con un número de roscas distinto al de la rosca del eje (1).
12. El mecanismo según cualquiera de las reivindicaciones 1 a 11, en el que el segundo engranaje (1b) está directamente formado sobre la superficie circunferencial exterior del eje (1). 40
Patentes similares o relacionadas:
Actuador de frenado para vehículo, del 12 de Febrero de 2020, de Chassis Brakes International B.V: Actuador de frenado de vehículo que comprende: - un tornillo , - un cárter interno roscado interiormente en contacto […]
Husillo de bolas de circulación de árbol, del 29 de Enero de 2020, de Hiwin Technologies Corp: Un husillo de bolas de circulación de árbol, que comprende un husillo provisto de una ranura helicoidal de husillo y un pasaje de retorno ; una rosca […]
Tornillo de bolas, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Tornillo de bolas con un husillo roscado , con una tuerca , con una pluralidad de cuerpos rodantes y con al menos un dispositivo de […]
 Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Transmisión para transformar un movimiento rotatorio en un movimiento lineal, del 17 de Abril de 2019, de Siemens Mobility GmbH: Transmisión para transformar un movimiento rotatorio en un movimiento lineal , sobre la que actúa una fuerza contraria (F) que actúa en la parte motriz, […]
Accionador electromecánico lineal con antirrotación incorporada, del 10 de Abril de 2019, de Umbragroup S.p.A: Un accionador electromecánico lineal con antirrotación incorporada, que comprende: - una estructura de contención que aloja un motor eléctrico, el motor […]
Mecanismo de tornillo y tuerca de bolas, del 9 de Enero de 2019, de PELLENC: Mecanismo de tornillo y tuerca de bolas que comprende un tornillo y una tuerca de roscas, cooperando la tuerca con el tornillo […]
Mecanismo de manguito de engranaje de tornillo coaxial, del 1 de Noviembre de 2017, de Spinex Tec, LLC: Un mecanismo de manguito de engranaje de tornillo coaxial que comprende: un primer miembro y un segundo miembro teniendo cada uno una superficie […]