Máquina herramienta y procedimiento para la supervisión de un estado de sujeción.
Máquina herramienta (1) con un husillo (4), con un portaherramientas (5) en el lado del husillo para alojar una herramienta (3) que presenta un cono de vástago hueco (12) y con un dispositivo de sujeción (7) para sujetar la herramienta (3) alojada en el portaherramientas (5) hasta que la herramienta (3) queda en contacto con una superficie anular (14) que envuelve el cono de vástago hueco (12) con una superficie de contacto (16) anular del portaherramientas (5),
presentando el dispositivo de sujeción (7) al menos dos sensores de fuerza (8) para detectar las fuerzas de sujeción que respectivamente actúan, para supervisar la alineación y/o posición correctas de la herramienta (3) alojada, caracterizada por que los sensores de fuerza (8) están dispuestos en la superficie de contacto (16) anular del portaherramientas (5) y sobresalen de la superficie de contacto (16) anular para detectar las fuerzas de sujeción que respectivamente actúan.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13152816.
Solicitante: SCHWABISCHE WERKZEUGMASCHINEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Seedorfer Strasse 91 78713 Schramberg-Waldmössingen ALEMANIA.
Inventor/es: WEBER,STEFAN DIPL.-ING.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00).
PDF original: ES-2528352_T3.pdf
Fragmento de la descripción:
Máquina herramienta y procedimiento para la supervisión de un estado de sujeción La presente invención se refiere a una máquina herramienta según el preámbulo de la reivindicación 1 tal como se dio a conocer por ejemplo por el documento DE102011100126.
La supervisión de la alineación correcta y/o de la posición correcta de herramientas o de piezas tiene cada vez más importancia por la creciente automatización en la construcción de máquinas herramienta. En la actualidad, las máquinas herramienta modernas comprenden frecuentemente sistemas de cambio de herramientas automáticos y/o dispositivos para cambiar piezas mecanizadas por piezas que han de ser mecanizadas. Esto incrementa en general la velocidad de producción y por tanto la productividad de las herramientas. Sin embargo, las partículas de virutas que se producen por ejemplo durante la mecanización de piezas se pueden depositar entre un portaherramientas y la herramienta o entre un portaherramientas y la pieza, de modo que después de haberse sujetado (incluidas las partículas de virutas) en el soporte previsto respectivamente, la herramienta o la pieza no queda alineada o posicionada de la manera deseada. Un fallo de alineación puede producirse también por otras causas. Por lo tanto, para que sea posible un cambio correcto de herramientas o de piezas, la alineación o posición correctas de la herramienta o de la pieza con respecto a la máquina herramienta ha de comprobarse durante o después de cada cambio. De esta manera, se evita la aparición de errores durante el mecanizado de piezas así como el desgaste inadecuado de herramientas, que en caso contrario provocan tiempos no deseados de reparación, de reequipamiento o de parada.
Como es sabido, esta supervisión de la alineación correcta durante el cambio de herramienta se puede conseguir mediante sistemas neumáticos. Para ello, por ejemplo, en una superficie de contacto de un portaherramientas están realizados taladros que después de montar la herramienta se cargan con aire comprimido estando parada la herramienta. Mediante una medición de caudal, durante la parada de la máquina se puede comprobar el contacto plano correcto de la herramienta en la superficie de contacto y por tanto la alineación correcta la herramienta. En caso de una alineación correcta se puede iniciar a continuación el proceso de mecanizado. Sin embargo, la precisión de los sistemas neumáticos es limitada y frecuentemente no es satisfactoria.
Además de los sistemas neumáticos existen soluciones alternativas en las que en diferentes lugares de medición, mediante sensores distanciómetros inductivos o capacitivos se detectan separaciones entre la herramienta y el portaherramientas. No obstante, estos sistemas generalmente tienen una estructura relativamente compleja.
Por lo tanto, la invención tiene el objetivo de proporcionar una máquina herramienta que supere las desventajas del estado de la técnica o proporcionar al menos una solución alternativa. En particular, la máquina herramienta debe permitir una supervisión más exacta, más fácil y de uso más amplio de la alineación y/o posición correctas de herramientas o de piezas.
Este objetivo se consigue mediante una máquina herramienta según la reivindicación 1.
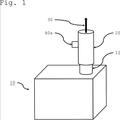
Según la invención, mediante los sensores de fuerza pueden detectarse en los lugares de medición correspondientes las respectivas fuerzas de sujeción que actúan en los mismos, es decir las fuerzas que sujetan la herramienta y/o la pieza. Una diferencia de la fuerza de sujeción que se produzca entre diferentes sensores de fuerza o lugares de medición indica entonces que la herramienta o la pieza no está alineada o posicionada correctamente, sino que por ejemplo está sujeta de forma oblicua. En cambio, si la diferencia de la fuerza de sujeción es despreciable o cero, esto indica una alineación correcta. Para determinar dicha diferencia de la fuerza de sujeción, la máquina herramienta puede comprender una unidad de evaluación realizada para ello. En la máquina herramienta según la invención se puede prescindir de manera ventajosa de una medición de distancia entre la herramienta o la pieza y un soporte en el lado de la máquina herramienta, así como de sistemas neumáticos. En su lugar, la detección según la invención de las fuerzas de sujeción que producen la sujeción de la herramienta o de la pieza permiten la supervisión del estado de sujeción no sólo temporalmente durante el montaje de la herramienta o de la pieza, sino también durante el mecanizado completo de la pieza. De esta manera, es posible detectar y seguir por medición el desarrollo del incremento de fuerza durante el montaje y realizar de forma más segura el mecanizado de piezas, por ejemplo, mediante una desconexión rápida en caso de bloqueo o colisión. La detección según la invención de las fuerzas de sujeción se puede realizar de manera ventajosa también con sistemas de supervisión de procesos basados en la potencia de accionamiento, por ejemplo para el control comparativo o para el incremento de la precisión. Por la alta sensibilidad y precisión que ofrecen los sensores de fuerza habituales, la supervisión de la alineación y/o de la posición según la invención es más exacta que los sistemas convencionales.
Preferentemente, los sensores de fuerza están dispuestos en un soporte soportado de forma móvil para las herramientas o piezas. De forma especialmente preferible, el soporte está montado de forma giratoria alrededor de un eje y los sensores de fuerza están dispuestos de forma simétricamente giratoria alrededor del eje. Por ejemplo, los sensores de fuerza pueden estar dispuestos en la zona de un soporte realizado como cono de vástago hueco, especialmente en una superficie de contacto de un soporte de cono de vástago hueco. Los soportes de cono de vástago hueco están muy extendidos en las máquinas herramienta con arranque de virutas por su asiento
comparativamente seguro.
Además, preferentemente, están previstos al menos tres sensores de fuerza dispuestos de forma simétricamente giratoria con respecto al portaherramientas o portapiezas. Tres sensores de fuerza son suficientes para supervisar la alineación o posición correctas de la herramienta o de la pieza. Se entiende que la precisión de la supervisión de alineación puede incrementarse por un mayor número de sensores de fuerza.
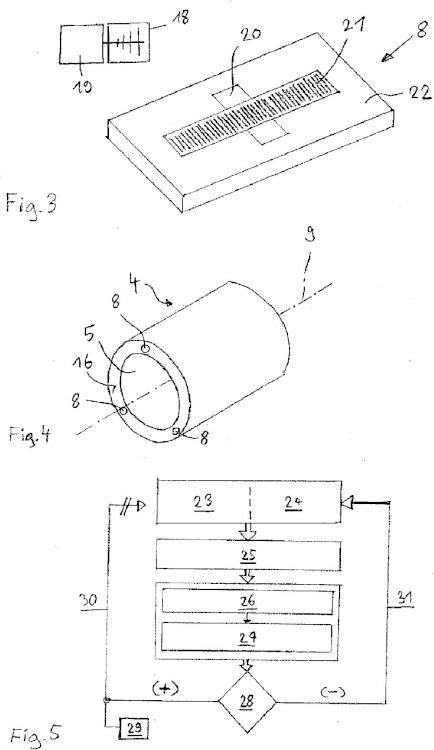
De forma especialmente preferible, los sensores de fuerza son sensores OAS (sensores de ondas acústicas superficiales) y están previstos medios de radiotransmisión para la emisión y la recepción inalámbricas de radioseñales a o desde los sensores OAS. Los medios de radiotransmisión pueden comprender por ejemplo una antena de emisión y/o de recepción dispuesta en el sensor OAS así como una unidad de emisión y/o de recepción dispuesta de forma estacionaria. El suministro eléctrico y la transmisión de las señales de sensor OAS se producen entonces exclusivamente a través de radioseñales eléctricas. Los sensores OAS se pueden identificar con la ayuda de un identificador individual, incluso si se emplea un número relativamente grande de sensores OAS. De esta manera, el sensor OAS puede asignarse geométricamente al punto de medición correspondiente y a la fuerza de sujeción detectada en este.
Más ventajas de la invención resultan de la descripción y del dibujo. Las formas de realización representadas y descritas no pretenden ser exhaustivas, sino que tienen carácter de ejemplo para la explicación de la invención. La invención está representada esquemáticamente en las figuras, de tal forma que se pueden apreciar bien las características esenciales de la invención. Las representaciones no están realizadas necesariamente a escala.
Muestran:
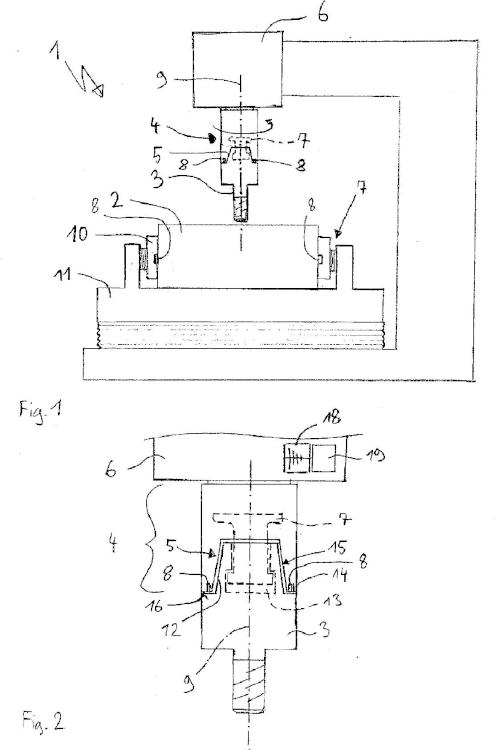
La figura 1 una máquina herramienta según la invención con sensores de fuerza para la supervisión de la
alineación y/o posición correctas de una herramienta y de una pieza;
la figura 2 una herramienta sujeta en un husillo en una sección parcial de la figura 1;
la figura 3 un sensor de fuerza realizado como sensor OAS;
la figura 4 el husillo de la figura 1 con un soporte para la herramienta, y
la figura 5 un diagrama de flujo de un procedimiento según la invención.
En la siguiente descripción del dibujo, para componentes idénticos o de funcionamiento idéntico se usan signos de referencia idénticos.
En la figura 1 está representada una máquina herramienta 1 mediante la que una pieza 2 se puede mecanizar con arranque de virutas mediante una herramienta 3 (por ejemplo una broca o una fresa) . Para permitir un mecanizado de piezas con diferentes herramientas 3 (diferentes diámetros de broca o de fresa) , mediante un cambiador de herramientas, la herramienta... [Seguir leyendo]
Reivindicaciones:
1. Máquina herramienta (1) con un husillo (4) , con un portaherramientas (5) en el lado del husillo para alojar una herramienta (3) que presenta un cono de vástago hueco (12) y con un dispositivo de sujeción (7) para sujetar la 5 herramienta (3) alojada en el portaherramientas (5) hasta que la herramienta (3) queda en contacto con una superficie anular (14) que envuelve el cono de vástago hueco (12) con una superficie de contacto (16) anular del portaherramientas (5) , presentando el dispositivo de sujeción (7) al menos dos sensores de fuerza (8) para detectar las fuerzas de sujeción que respectivamente actúan, para supervisar la alineación y/o posición correctas de la herramienta (3) alojada, caracterizada por que los sensores de fuerza (8) están dispuestos en la superficie de contacto (16) anular del portaherramientas (5) y sobresalen de la superficie de contacto (16) anular para detectar las fuerzas de sujeción que respectivamente actúan.
2. Máquina herramienta según la reivindicación 1, caracterizada por que el soporte (5) está soportado de forma giratoria alrededor de un eje (9) y los sensores de fuerza (8) están dispuestos en la superficie de contacto (16) 15 anular de forma simétricamente giratoria alrededor del eje (9) .
3. Máquina herramienta según una de las reivindicaciones anteriores, caracterizada por que están previstos al menos tres sensores de fuerza (8) .
4. Máquina herramienta según una de las reivindicaciones anteriores, caracterizada por que los sensores de fuerza son sensores OAS (8) y por que están previstos medios de radiotransmisión (18, 20) para la emisión y la recepción inalámbricas de radioseñales a o desde los sensores OAS (8) .
Patentes similares o relacionadas:
Unidad de máquina herramienta con control de excentricidad axial y procedimiento de prueba para el estado de sujeción, del 18 de Diciembre de 2019, de Franz Kessler GmbH: Unidad de máquina herramienta motorizada con una unidad de estator y una unidad de rotor giratoria alrededor de un eje de rotación, en donde […]
Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC y máquina herramienta NC con control de concentricidad, del 30 de Octubre de 2019, de SCHWABISCHE WERKZEUGMASCHINEN GMBH: Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC , que puede rotar alrededor del eje […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Dispositivo y procedimiento para trabajo mecánico, del 17 de Julio de 2019, de BISIACH & CARRU'S.P.A.: Cabezal de trabajo para robots industriales, que comprende: - un husillo que comprende una herramienta , estando conectado dicho husillo a un carro […]
Procedimiento y dispositivo para aplicar un fluido sobre una superficie de un componente, del 3 de Abril de 2019, de Drei Bond GmbH: Procedimiento para aplicar un fluido sobre una superficie de un componente , donde el componente se dispone en una pluralidad de alojamientos del componente […]
Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo, del 13 de Junio de 2018, de OTT-JAKOB SPANNTECHNIK GMBH: Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo , en particular en una máquina de mecanización, […]
Aparato de ajuste de herramienta y medición, del 19 de Julio de 2017, de E. Zoller GmbH & Co. KG Einstell- und Messgeräte: Sistema con un aparato de ajuste de herramienta y medición para medir una unidad de herramienta , con al menos un dispositivo de cámara que […]