Localización de interiores mejorada.
Sistema de localización en interiores (10; 10') para localizar un dispositivo móvil electrónico dentro de un entornode interiores,
que comprende:
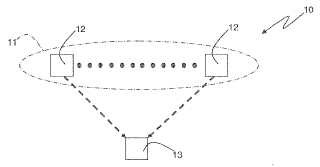
• una pluralidad de nodos de transmisión (12) dispuestos en diferentes posiciones dentro de un entorno de interiores y configurados para transmitir señales de RF; y
• un dispositivo móvil electrónico (13) configurado para recibir señales de RF desde los nodos detransmisión (12); donde el sistema de localización en interiores (10; 10') se encuentra configurado paraoperar en:
• un modo de entrenamiento, en el que el dispositivo móvil electrónico (13) puede operar para calcularmagnitudes de referencia en base a las potencias de las señales de RF recibidas desde los nodos detransmisión (12) en diferentes posiciones de referencia dentro del entorno de interiores; y
• un modo de localización, en el que el dispositivo móvil electrónico (13) puede operar para calcular lasmagnitudes presentes en base a las potencias se las señales de RF recibidas desde los nodos detransmisión (12) en su localización presente dentro de un entorno de interiores, y en el que la localizaciónpresente del dispositivo móvil electrónico (13) se determina en base a las magnitudes presentes y dereferencia;
donde el sistema de localización en interiores (10; 10') se encuentra caracterizado porque:
• los nodos de transmisión (12) pueden operar, tanto en el modo de entrenamiento como en el delocalización, para transmitir las señales de RF por al menos dos canales radioeléctricos diferentes;
• el dispositivo móvil electrónico (13) puede operar en el modo de entrenamiento para calcular, para cadaposición de referencia y cada uno de los, al menos, dos canales radioeléctricos, magnitudes de referenciacorrespondientes en base a las señales recibidas por el dispositivo móvil electrónico (13) en dicha posiciónde referencia desde los nodos de transmisión (12) por dicho canal radioeléctrico; y
• el dispositivo móvil electrónico (13) puede operar en el modo de localización para calcular, para cada unode los, al menos, dos canales radioeléctricos diferentes, correspondientes magnitudes presentes en base alas señales de RF recibidas por el dispositivo móvil electrónico (13) en su localización presente desde losnodos de transmisión (12) por dicho canal radioeléctrico.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/061444.
Solicitante: TELESPAZIO S.P.A.
Nacionalidad solicitante: Italia.
Dirección: Via Tiburtina 965 Roma ITALIA.
Inventor/es: VALLETTA,DAMIANO, MONTI,CRISTIANO, BELLOFIORE,PAOLO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04W64/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04W REDES DE COMUNICACION INALAMBRICAS (difusión H04H; sistemas de comunicación que utilizan enlaces inalámbricos para comunicación no selectiva, p. ej. extensiones inalámbricas H04M 1/72). › Localización de usuarios o terminales para propósitos de gestión de la red, p. ej. gestión de movilidad.
PDF original: ES-2436727_T3.pdf
Fragmento de la descripción:
Localización en interiores mejorada Área técnica de la invención La presente invención hace referencia, en general, a la localización en entornos interiores y, en particular, a un sistema de localización en interiores basado en radio frecuencia.
Arte previo Como es conocido, en los últimos tiempos se percibe, cada vez más, la necesidad de sistemas de localización cada vez más fiables.
Por consiguiente, se han propuesto muchos sistemas de localización indicados para determinar o rastrear la posición de un usuario.
Los sistemas de localización pueden dividirse en tres categorías principales: sistemas de localización global, sistemas de localización de área amplia basados en redes celulares, y sistemas de localización en interiores.
Un sistema habitual de localización global es el sistema de posicionamiento global (GPS, por sus siglas en inglés) , que aprovecha las señales procedentes de múltiples satélites para realizar un proceso de multilateración para determinar localizaciones con una precisión de aproximadamente 5 m. Sin embargo, el GPS resulta ineficaz para su uso en interiores o en áreas urbanas en las que los altos edificios apantallan las señales del satélite, es decir en condiciones de interiores profundos.
Por otro lado, los sistemas de localización de área amplia basados en redes celulares, en general, se basan en la medición de la potencia de la señal para saber la distancia entre un terminal de usuario y una estación base. Sin embargo, la precisión de los sistemas de localización de área amplia se encuentra sumamente limitada por el tamaño de la célula. Más aún, la efectividad de estos sistemas para un entorno de interiores se encuentra también limitada por las múltiples reflexiones sufridas por la señal de radio frecuencia (RF) , que causan, por ejemplo, fenómenos de multitrayecto y apantallamiento.
Finalmente, los sistemas de localización en interiores sólo están diseñados para realizar localizaciones en entornos de interiores. Se han propuesto durante el presente año varios sistemas de localización en interiores basados en diversas tecnologías, tales como infrarrojos (IR) , ultrasonidos, video vigilancia, y señales de RF. Entre estos sistemas, las aproximaciones basadas en RF han captado una gran atención en los últimos años, ya que los sistemas de localización basados en RF presentan distintas ventajas en entornos de interiores por encima de todos los demás sistemas.
De hecho, un sistema de localización basado en RF es una solución de bajo coste y abarca una gran área en comparación con otros tipos de sistemas de localización en interiores. De hecho, un sistema de localización basado en RF puede funcionar en un edificio grande o incluso a través de muchos edificios.
Además, un sistema de localización basado en RF es un sistema estable debido a la propagación robusta de la señal, al contrario que los sistemas de localización basados en video o en IR (infrarrojo) que están sujetos a restricciones, tales como limitaciones en la línea de visión directa o a un rendimiento de mala calidad con iluminación fluorescente o con la luz directa del sol.
Los sistemas de localización basados en RF habituales, explotan los sistemas de Fidelidad Inalámbrica (Wi-Fi, por sus siglas en inglés) , es decir basados en el estándar IEEE 802.11, además de otros sistemas inalámbricos, tales como redes de sensores inalámbricos, redes basadas en Bluetooth, etc.
De hecho, en general, un sistema de localización basado en RF para un entorno de interiores comprende una red de nodos, tal como una red Wi-Fi, que consta de una pluralidad de nodos de transmisión de RF, tales como puntos de acceso habituales, dispuestos dentro de un entorno de interiores y configurados para transmitir señales respectivas de RF en un único canal radioeléctrico. El sistema de localización basado en RF comprende, además, al menos un dispositivo móvil electrónico, tal como un ordenador portátil o un palmtop, que va a ser ubicado dentro de un entorno interior. El dispositivo móvil electrónico está configurado para recibir las señales de RF desde los nodos de transmisión de RF en un único canal radioeléctrico.
En general, la localización del dispositivo móvil electrónico llevada a cabo por el sistema de localización basado en RF, se basa en la aproximación de potencia de la señal recibida (RSS, por sus siglas en inglés) , que hace referencia
a una técnica conocida, según la cual la localización del dispositivo móvil electrónico dentro del entorno de interiores se calcula comparando la huella de potencia de señal presente recibida con la huellas de potencia de señal de referencia almacenadas.
La filosofía general del enfoque de RSS es establecer una correspondencia exacta entre una posición dada y la potencia de señal recibida media en dicha posición dada, procedente de los nodos de transmisión de RF.
En detalle, los sistemas de localización basados en RF necesitan entrenarse antes de realizar la localización del dispositivo móvil electrónico. Por consiguiente, el proceso de localización comprende dos fases principales:
• una fase de entrenamiento, en donde las potencias medias de las señales de RF recibidas de los nodos de transmisión de RF sobre un único canal radioeléctrico se calculan en las posiciones de referencia y se introducen en una base de datos de RF para crear un mapa de RF del entorno de interiores, donde el mapa de RF contiene huellas de potencia de señal de referencia en las posiciones de referencia; y
• una fase en línea, en donde el dispositivo móvil electrónico que va a ser localizado calcula las potencias presentes de las señales de RF recibidas en su localización dentro del entorno de interiores procedentes de los nodos de transmisión de RF en un único canal radioeléctrico, y entonces compara las potencias presentes con todas las tuplas de la base de datos de RF para seleccionar aquella posición de referencia del mapa de RF que se encuentre más cercana en términos de potencia recibida.
El mapa de RF se encuentra organizado como una matriz en donde cada fila hace referencia a las potencias de las señales de RF recibidas, en una posición de referencia correspondiente, de los nodos de transmisión, donde cada una de ellas indexa una columna de la matriz.
Una vez que el dispositivo móvil electrónico ha calculado las potencias de las señales de RF recibidas de los nodos de transmisión de RF, y ha formado con dichas potencias presentes un vector de potencia presente correspondiente, compara este vector de potencia presente con todas las filas del mapa de RF para encontrar la coincidencia más cercana.
La comparación se basa, habitualmente, en una distancia euclidiana entre el vector de potencia presente y cada fila del mapa de RF, de manera que el dispositivo móvil electrónico esté localizado en la posición de referencia, cuya fila correspondiente en el mapa de RF presenta la menor distancia euclidiana del vector de potencia presente.
Un sistema de localización en interiores que opera según se ha descrito previamente, se revela en la patente estadounidense US 2007/0133487 A1.
En particular, la patente US 2007/0133487 A1 revela un método y un sistema para proporcionar una estimación de una localización móvil de un nodo, punto o terminal inalámbrico en una red de área local inalámbrica (WLAN, por sus siglas en inglés) u otra red adecuada, donde la estimación se basa en la correlación de una medición de la potencia de una señal de radio frecuencia (RF) tomada en un único canal radioeléctrico, y un punto de rejilla en una base de datos de potencia de señal o mapa de radio frecuencia construido sobre la base de las mediciones de potencia de señal de RF tomadas en dicho único canal radioeléctrico. Según la patente US 2007/0133487 A1, la base de datos de potencia de señal o mapa de radio frecuencia, se construye utilizando un algoritmo de una huella de potencia de señal, que incluye seleccionar y medir un conjunto de puntos de rejilla en la WLAN u otra red adecuada.
Objeto y resumen de la invención El solicitante ha observado que los sistemas de localización basados en RF conocidos sufren diversos problemas debido a la variabilidad de la señal de RF.
En particular, la caída puede afectar a la potencia de señal de RF causando una variabilidad en el tiempo y el espacio de la señal de RF que puede conducir a una estimación de la potencia presente inexacta.
A su vez, una estimación de la potencia presente inexacta puede conducir a seleccionar una tupla errónea de la base de datos de RF, dando como resultado, de ese modo, una localización errónea del dispositivo móvil... [Seguir leyendo]
Reivindicaciones:
1. Sistema de localización en interiores (10; 10’) para localizar un dispositivo móvil electrónico dentro de un entorno de interiores, que comprende:
• una pluralidad de nodos de transmisión (12) dispuestos en diferentes posiciones dentro de un entorno de 5 interiores y configurados para transmitir señales de RF; y
• un dispositivo móvil electrónico (13) configurado para recibir señales de RF desde los nodos de transmisión (12) ; donde el sistema de localización en interiores (10; 10’) se encuentra configurado para operar en:
• un modo de entrenamiento, en el que el dispositivo móvil electrónico (13) puede operar para calcular
magnitudes de referencia en base a las potencias de las señales de RF recibidas desde los nodos de transmisión (12) en diferentes posiciones de referencia dentro del entorno de interiores; y
• un modo de localización, en el que el dispositivo móvil electrónico (13) puede operar para calcular las magnitudes presentes en base a las potencias se las señales de RF recibidas desde los nodos de transmisión (12) en su localización presente dentro de un entorno de interiores, y en el que la localización presente del dispositivo móvil electrónico (13) se determina en base a las magnitudes presentes y de referencia;
donde el sistema de localización en interiores (10; 10’) se encuentra caracterizado porque:
• los nodos de transmisión (12) pueden operar, tanto en el modo de entrenamiento como en el de localización, para transmitir las señales de RF por al menos dos canales radioeléctricos diferentes;
• el dispositivo móvil electrónico (13) puede operar en el modo de entrenamiento para calcular, para cada posición de referencia y cada uno de los, al menos, dos canales radioeléctricos, magnitudes de referencia correspondientes en base a las señales recibidas por el dispositivo móvil electrónico (13) en dicha posición de referencia desde los nodos de transmisión (12) por dicho canal radioeléctrico; y
• el dispositivo móvil electrónico (13) puede operar en el modo de localización para calcular, para cada uno
de los, al menos, dos canales radioeléctricos diferentes, correspondientes magnitudes presentes en base a las señales de RF recibidas por el dispositivo móvil electrónico (13) en su localización presente desde los nodos de transmisión (12) por dicho canal radioeléctrico.
2. Sistema de localización en interiores (10) según la reivindicación 1, en donde el dispositivo móvil electrónico (13) se encuentra además configurado para:
• almacenar las magnitudes de referencia calculadas en el modo de entrenamiento; y
• en el modo de localización, determinar su localización presente en base a las magnitudes presentes y de referencia.
3. Sistema de localización en interiores (10’) según la reivindicación 1, que además comprende una unidad de procesamiento central (14) acoplado a un dispositivo móvil electrónico (13) que se encuentra configurado además para proporcionar una unidad de procesamiento central (14) con las magnitudes de referencia en el modo de entrenamiento; donde la unidad de procesamiento central (14) se encuentra configurada para:
• almacenar las magnitudes de referencia calculadas en el modo de entrenamiento; y
• en el modo de localización, determinar la localización presente del dispositivo móvil electrónico (13) en 40 base a las magnitudes presentes y de referencia.
4. Sistema de localización en interiores (10) según la reivindicación 1, en donde el dispositivo móvil electrónico (13) se encuentra además configurado para:
• en el modo de entrenamiento, crear y almacenar un mapa de RF del entorno de interiores, donde dicho mapa de RF comprende para cada posición de referencia vectores de la magnitud de referencia 45 correspondientes, donde cada uno comprende las magnitudes de referencia calculadas en base a las
potencias de las señales de RF recibidas por el dispositivo móvil electrónico (13) en la posición de referencia desde los nodos de transmisión (12) para un canal radioeléctrico correspondiente;
• en el modo de localización, formar los vectores de la magnitud presente, donde cada vector de la magnitud comprende las magnitudes presentes calculadas en base a las potencias de las señales de RF recibidas por el dispositivo móvil electrónico (13) en su localización presente, desde los nodos de transmisión (12) para un canal radioeléctrico correspondiente;
• en el modo de localización, determinar al menos una posición de referencia cuyos vectores de la magnitud de referencia cumplen con una relación dada con los vectores de la magnitud presente; y
• en el modo de localización, determinar su localización presente en base a, al menos, una posición de referencia determinada.
5. Sistema de localización en interiores (10’) según la reivindicación 1, que además comprende una unidad de procesamiento central (14) acoplada al dispositivo móvil electrónico (13) que se encuentra además configurado para proporcionar a la unidad de procesamiento central (14) las magnitudes de referencia en el modo de entrenamiento y las magnitudes presentes en el modo de localización; donde la unidad de procesamiento central (14) se encuentra configurada para:
• en el modo de entrenamiento, crear y almacenar un mapa de RF del entorno de interiores, donde dicho mapa de RF comprende para cada posición de referencia correspondientes vectores de la magnitud de referencia, donde cada uno comprende las magnitudes de referencia calculadas por el dispositivo móvil electrónico (13) en base a las potencias de las señales de RF recibidas por dicho dispositivo móvil electrónico (13) en la posición de referencia desde los nodos de transmisión (12) por un canal radioeléctrico correspondiente;
• en el modo de localización, formar los vectores de la magnitud presente, donde cada vector de la magnitud presente comprende las magnitudes presentes calculadas por el dispositivo móvil electrónico (13) en base a las potencias de las señales de RF recibidas por dicho dispositivo móvil electrónico (13) en su localización presente desde los nodos de transmisión (12) por un canal radioeléctrico correspondiente;
• en el modo de localización, determinar al menos una posición de referencia cuyos vectores de la magnitud de referencia cumplen con una relación dada con los vectores de la magnitud presente; y
• en el modo de localización, determinar la localización presente del dispositivo móvil electrónico (13) en base a, al menos, una posición de referencia determinada.
6. Sistema de localización en interiores (10; 10’) según la reivindicación 4 o 5, en donde el mapa de RF se crea en base a la base de datos que comprende una pluralidad de tuplas, donde cada tupla almacena:
• una magnitud de referencia correspondiente;
• la identidad de un nodo de transmisión (12) que ha transmitido la señal de RF en base a la cual el dispositivo móvil electrónico (13) ha calculado la magnitud de referencia correspondiente;
• un indicador del canal radioeléctrico por el que el dispositivo móvil electrónico (13) ha recibido la señal de RF en base a la cual ha calculado la magnitud de referencia correspondiente; y
• coordenadas espaciales de la posición de referencia en la que el dispositivo móvil electrónico (13) ha recibido la señal de RF en base a la cual ha calculado la magnitud de referencia correspondiente.
7. Sistema de localización en interiores (10; 10’) según cualquiera de las reivindicaciones 4-6, en donde la, al menos una, posición de referencia, cuyos vectores de la magnitud correspondiente cumplen con una relación dada con los vectores de la magnitud presente, se determina en base a calcular para cada posición de referencia distancias euclidianas respectivas, cada una de las cuales se calcula entre un vector de la magnitud presente correspondiente que comprende las magnitudes presentes calculadas por el dispositivo móvil electrónico (13) en base a las potencias de las señales de RF recibidas por dicho dispositivo móvil electrónico (13) por un canal radioeléctrico respectivo, y un vector de la magnitud de referencia correspondiente que comprende las magnitudes de referencia calculadas por el dispositivo móvil electrónico (13) en base a las potencias de las señales de RF recibidas por dicho dispositivo móvil electrónico (13) en la posición de referencia por dicho canal radioeléctrico respectivo.
8. Sistema de localización en interiores (10; 10’) según la reivindicación 7, en donde se estima que la localización presente del dispositivo móvil electrónico (13) es aquella posición de referencia para la que se calcula la distancia euclidiana más pequeña entre todas las distancias euclidianas calculadas.
9. Sistema de localización en interiores (10; 10’) según la reivindicación 7, en donde para cada posición de referencia un parámetro indicador de distancia se calcula en base a las respectivas distancias euclidianas para la posición de referencia; y en donde se estima que la localización presente del dispositivo móvil electrónico (13) es aquella posición de referencia para la que se calcula el parámetro indicador de la distancia más pequeña entre todos los parámetros indicadores de distancia calculados.
10. Sistema de localización en interiores (10; 10’) según la reivindicación 7, en donde se identifica un primer subconjunto de posiciones de referencia, donde las posiciones de referencia que pertenecen al primer subconjunto son aquellas posiciones de referencia para las que se calculan las distancias euclidianas más pequeñas entre todas las distancias euclidianas calculadas; y en donde se estima que la localización presente del dispositivo móvil electrónico (13) es un baricentro geográfico de las posiciones de referencia que pertenecen al primer subconjunto.
11. Sistema de localización en interiores (10; 10’) según la reivindicación 7, en donde para cada posición de referencia un parámetro indicador de distancia se calcula en base a las distancias euclidianas respectivas calculadas para la posición de referencia; en donde se identifica un segundo subconjunto de posiciones de referencia para las que se calculan los parámetros indicadores de la distancia más pequeña entre todos los parámetros indicadores de distancia calculados; y en donde se estima que la localización presente del dispositivo móvil electrónico (13) es un baricentro geográfico de las posiciones de referencia que pertenecen al segundo subconjunto.
12. Sistema de localización en interiores (10; 10’) según la reivindicación 9 u 11, en donde el parámetro indicador de distancia calculado para cada posición de referencia es la suma de todas las distancias euclidianas calculadas para la posición de referencia.
13. Sistema de localización en interiores (10; 10’) según cualquiera de las reivindicaciones precedentes, en donde el dispositivo móvil electrónico (13) comprende un primer selector de canal (42) configurado para seleccionar de forma dinámica un canal radioeléctrico entre los, al menos, dos canales radioeléctricos diferentes fijos por el cual recibe las señales de RF desde los nodos de transmisión (12) , y en donde cada nodo de transmisión (12) comprende un correspondiente segundo selector de canal (42) configurado para seleccionar de forma dinámica un canal radioeléctrico entre los, al menos, dos canales radioeléctricos diferentes por el cual transmiten las señales de RF.
14. Sistema de localización en interiores (10; 10’) según la reivindicación 13, en donde el primer selector de canal
(42) y los segundos selectores de canal (42) se encuentran configurados para tener un único e igual patrón de selección de los, al menos, dos diferentes canales radioeléctricos, y para sincronizarse en el mismo canal radioeléctrico seleccionado.
15. Sistema de localización en interiores (10; 10’) según la reivindicación 13, en donde el primer selector de canal
(42) se encuentra configurado para seleccionar cada canal radioeléctrico durante un tiempo de escucha (TL) lo suficientemente largo para permitir que los segundos selectores de canal (42) seleccionen el canal radioeléctrico seleccionado por el primer selector de canal (42) .
Patentes similares o relacionadas:
Virtualización de funciones de red en grupos a medida, del 17 de Junio de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para virtualizar una función de red entre un grupo a medida que comprende una pluralidad de terminales móviles ubicados unos […]
Procedimientos y sistemas de soporte de localización para el Internet de las cosas, del 17 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para una entidad de gestión de movilidad, MME, que comprende: recibir mediciones de localización para un equipo de usuario, UE, […]
Procedimientos y sistemas de soporte de localización para el Internet de las cosas, del 17 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento que comprende: entrar en un estado conectado con una red inalámbrica por un equipo de usuario, UE, que […]
Proporcionar una posición actual a la vez que se reduce el consumo total de energía, del 13 de Mayo de 2020, de Doro AB: Un terminal de comunicaciones móvil que comprende una interfaz de radiofrecuencia y un controlador y que se dispone […]
Método de detección de bandas de frecuencia no utilizadas y aparato de comunicación por radio en un sistema de radio cognitivo, del 6 de Mayo de 2020, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un método de detección de bandas de frecuencia no utilizadas en un sistema de radio cognitivo en el que cada uno de una pluralidad de aparatos de comunicación por radio, […]
Compartición de información de ubicación en un entorno informático en red, del 15 de Abril de 2020, de Glympse Inc: Un sistema, que comprende, un servidor , y un cliente de origen ejecutable en un primer dispositivo electrónico en comunicación con […]
Selección del QCI de una conexión de un dispositivo agregador, del 1 de Abril de 2020, de Vodafone IP Licensing Limited: Un primer dispositivo de comunicación para proporcionar funcionalidad de agregador a uno o más segundos dispositivos de comunicación […]
Activación de funcionalidad de punto de acceso en un dispositivo móvil, del 25 de Marzo de 2020, de Vodafone IP Licensing Limited: Un método para notificar la disponibilidad de un dispositivo de comunicaciones para actuar como agregador en una red de telecomunicaciones que tiene al menos […]