INSTRUMENTAL QUIRÚRGICO.
Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva,
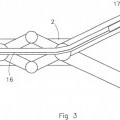
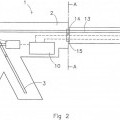
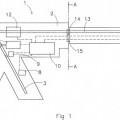
comprendiendo el instrumento un bastidor alargado que, en la proximidad de un primer extremo del mismo, comprende un elemento de mando, que se puede accionar manualmente, y, en un segundo extremo del mismo, por lo menos un elemento de trabajo que se puede desplazar con respecto al bastidor, en el que el instrumento (1) comprende unos medios para retroalimentar una fuerza que se ejerce sobre el elemento de trabajo (4) del instrumento al elemento de mando (3), comprendiendo los medios por lo menos un primer sensor de fuerza (6) para medir la fuerza que se ejerce sobre el elemento de trabajo, una unidad de control (10) y un primer accionador (11), que se acopla al elemento de mando, controlando la unidad de control por lo menos el primer accionador basándose en una señal que se origina en el primer sensor de fuerza, caracterizado porque los medios comprenden asimismo un primer sensor de posición (7) para determinar la posición del elemento de trabajo (4) con respecto al bastidor (2), porque la unidad de control (10) determina la impedancia a la que se somete el elemento de trabajo (4) basándose en la fuerza que se ejerce sobre el elemento de trabajo, la posición en la que se encuentra el elemento de trabajo con respecto al bastidor (2) y la velocidad a la que se desplaza el elemento de trabajo con respecto al bastidor, controlando la unidad de control por lo menos en el primer accionador (11) basándose en la impedancia, y porque el primer sensor de fuerza (6) comprende fibra de vidrio (16) y una superficie reflectora (17), mediante las que una fuente de luz y un sensor de luz se disponen en la proximidad de un primer extremo de la fibra de vidrio, y mediante las que un segundo extremo de la fibra de vidrio y la superficie reflectora se disponen en el elemento de trabajo, de tal modo que una flexión o cambio de forma de dicho elemento de trabajo tiene como resultado un cambio en la posición o la orientación de dicha superficie reflectora con respecto a la fibra de vidrio
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2002/000574.
Solicitante: VLEUGELS HOLDING B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: HOOGBRUGSTRAAT 72-A 6221 CS MAASTRICHT PAISES BAJOS.
Inventor/es: Vleugels,Michel Petronella Hubertus, Lazeroms,Markus Cornelis Jacobus.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Septiembre de 2002.
Clasificación Internacional de Patentes:
- A61B17/29 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Pinzas para la cirugía mínimamente invasiva.
- A61B19/00M
Clasificación PCT:
- A61B17/28 A61B 17/00 […] › Pinzas quirúrgicas (pinzas de biopsia A61B 10/06; forceps obstétricos A61B 17/44).
- A61B19/00
Clasificación antigua:
- A61B17/28 A61B 17/00 […] › Pinzas quirúrgicas (pinzas de biopsia A61B 10/06; forceps obstétricos A61B 17/44).
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356121_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un primer extremo del mismo, comprende un elemento de mando, que puede funcionar manualmente y, en un segundo extremo del mismo, por lo menos un elemento de trabajo que se puede desplazar con respecto al bastidor. 5
Un instrumento de este tipo se utiliza en particular en los procedimientos quirúrgicos que utilizan técnicas quirúrgicas mínimamente invasivas. En una intervención mínimamente invasiva de este tipo, se realiza un cierto número de pequeñas incisiones y los instrumentos y elementos similares se pueden introducir a través de dichas incisiones. En general, se dispone un tubo cilíndrico en la incisión y los instrumentos se disponen a través del mismo. Los instrumentos que se utilizan corresponden, en principio, a los instrumentos que se utilizan en las 10 técnicas quirúrgicas convencionales. Sin embargo, se requiere un instrumento estrecho y alargado a fin de satisfacer las necesidades específicas del procedimiento mínimamente invasivo, es decir, el instrumento se ha de disponer a través del tubo relativamente estrecho, sobresaliendo el elemento de trabajo en un extremo del tubo, mientras que el elemento de mando sobresale en el otro extremo del tubo. Un instrumento adecuado comprende, por lo tanto, por lo menos un bastidor alargado, un elemento de trabajo que se puede desplazar con respecto al 15 bastidor y un elemento de mando, mediante el que se puede accionar el elemento de trabajo del instrumento. El elemento de trabajo del instrumento puede desempeñar diversas funciones. Por ejemplo, se puede utilizar para sujetar, fijar, cortar o grapar. En los casos que requieren una pluralidad de acciones o de instrumentos, se utilizarán dos o más elementos de trabajo se pueden desplazar con respecto al bastidor.
Las técnicas quirúrgicas mínimamente invasivas presentan la ventaja de que se requiere una incisión más 20 pequeña y, por lo tanto, existe generalmente un menor riesgo de infección y, en promedio, es necesario un período de hospitalización más corto.
Aparte de los beneficios conocidos de las técnicas quirúrgicas mínimamente invasivas, se ha de mencionar asimismo un cierto número de inconvenientes. El cirujano no dispone de una visión directa de las acciones que está realizando. Resulta necesario utilizar cámaras y pantallas de televisión o elementos similares para obtener la 25 información visual que está directamente disponible en las técnicas quirúrgicas convencionales. La forma específica de los instrumentos utilizados, es decir, relativamente estrechos y alargados, tiene como resultado una mayor fricción en términos relativos y los instrumentos son más flexibles, de tal modo que resulta peor la reacción mecánica de la fuerza ejercida sobre el elemento de trabajo para el mecanismo de funcionamiento. Por consiguiente, el cirujano tiene menos conocimiento de la fuerza que ejerce mediante el elemento de trabajo del instrumento sobre 30 algo que se encuentra en el elemento de trabajo del instrumento. En consecuencia, es posible, por ejemplo, que pueda producir daños en un tejido como resultado de sujetar el mismo con demasiada fuerza.
El documento WO 98/11833 describe un instrumento para técnicas quirúrgicas mínimamente invasivas en el que se reduce la fricción en el instrumento en comparación con los diseños convencionales mediante la utilización de cojinetes de contactos rodantes. Ello tiene como resultado una mejor reacción mecánica de la fuerza que se 35 ejerce sobre el elemento de trabajo del instrumento. Sin embargo, como consecuencia de la forma específica requerida para los instrumentos destinados a la cirugía mínimamente invasiva, la fricción y la histéresis se encuentran todavía presentes en el diseño y, por lo tanto, la fuerza que se ejerce sobre el elemento de trabajo del instrumento no se retroalimenta correctamente al mecanismo de funcionamiento del instrumento. Como resultado de ello, el usuario de un instrumento de este tipo no tiene una "sensación" óptima del tejido o elemento similar que se 40 está manipulando con el instrumento. Resulta, por lo tanto, difícil para un cirujano disponer con precisión el elemento de trabajo del instrumento. El documento US 5609 607 A da a conocer un instrumento que presenta las características del preámbulo de la reivindicación 1.
El objetivo de la presente invención es proporcionar un instrumento mejorado para utilizar en cirugía, en particular, en cirugía mínimamente invasiva, que elimine el inconveniente mencionado anteriormente. 45
El objetivo se alcanza mediante un instrumento según el preámbulo de la reivindicación 1. El instrumento comprende unos medios para retroalimentar una fuerza que se ejerce sobre el elemento de trabajo del instrumento hacia el elemento de mando, comprendiendo los medios por lo menos un primer sensor de fuerza para determinar la fuerza que se ejerce sobre el elemento de trabajo, una unidad de control y un primer accionador que se acopla al elemento de mando, controlando la unidad de control por lo menos el primer accionador basándose en una señal 50 que se origina en el primer sensor de fuerza.
Al determinar la fuerza que se ejerce sobre el elemento de trabajo utilizando un sensor de fuerza y retroalimentándola a través de una unidad de control hacia el elemento de mando, el usuario puede sentir la fuerza que se ejerce mediante el elemento de trabajo sin que esta sensación se vea influida por la fricción y/o la histéresis en el instrumento. El elemento de mando se controla, por así decirlo, mediante el primer accionador. 55
El elemento de trabajo utilizado en el instrumento puede desempeñar diversas funciones. Por ejemplo, puede ser apto para sujetar, fijar, apretar o grapar o para soportar una aguja o elemento similar. A menudo, existen dos o más de dichos elementos de trabajo que se pueden desplazar con respecto al bastidor. Además, se puede
diseñar el instrumento de tal modo que los elementos de trabajo se puedan disponer de un modo intercambiable en el instrumento.
El elemento de mando se acciona manualmente y es generalmente una palanca de mando que se encuentra presente en un instrumento quirúrgico convencional. Sin embargo, resulta posible asimismo que el elemento de mando se diseñe de un modo distinto, por ejemplo, como un botón giratorio o de un modo similar. 5
El instrumento quirúrgico se sujeta preferentemente con la mano.
Los sensores, los accionadores y la unidad de control se integran preferentemente en el instrumento o se fijan directamente al instrumento. Como resultado de ello, el instrumento continúa siendo fácil de manejar, de tal modo que resulta fácil de utilizar para el usuario y puede presentar unos movimientos muy flexibles. El instrumento según la presente invención se puede diseñar ventajosamente con unas dimensiones que correspondan 10 sustancialmente a las dimensiones de los instrumentos convencionales mínimamente invasivos o una versión solo ligeramente ampliada de los mismos.
La unidad de control determina la impedancia a la que se somete el elemento de trabajo, por ejemplo, como resultado de la presencia de un tejido o elemento similar, basándose en la fuerza que se ejerce sobre el elemento de trabajo, la posición en la que se dispone el elemento de trabajo con respecto al bastidor y la velocidad a la que el 15 elemento de trabajo se desplaza con respecto al bastidor, controlando la unidad de control por lo menos el primer accionador basándose en la impedancia.
La impedancia de un material específico, constituye una buena medida de la sensación proporcionada por un material de este tipo cuando se toca. La unidad de control según la presente invención retroalimenta al elemento de mando la impedancia a la que se somete el elemento de trabajo del instrumento, de tal modo que el usuario tiene 20 una "sensación" muy realista del tejido o elemento similar que se está manipulado mediante el elemento de trabajo.
La fuerza que se ejerce sobre el elemento de trabajo y la posición del elemento de trabajo con respecto al bastidor se determinan con la ayuda del primer sensor de fuerza y el primer sensor de posición, respectivamente. La velocidad del elemento de trabajo se determina preferentemente mediante la derivada con respecto al tiempo de la señal de posición determinada mediante el primer sensor de posición, pero es posible asimismo, a título de ejemplo, 25 determinar la... [Seguir leyendo]
Reivindicaciones:
1. Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un primer extremo del mismo, comprende un elemento de mando, que se puede accionar manualmente, y, en un segundo extremo del mismo, por lo menos un elemento de trabajo que se puede desplazar con respecto al bastidor, en el que el instrumento (1) comprende unos medios para retroalimentar una fuerza que se ejerce sobre el elemento de trabajo (4) del instrumento al elemento de 5 mando (3), comprendiendo los medios por lo menos un primer sensor de fuerza (6) para medir la fuerza que se ejerce sobre el elemento de trabajo, una unidad de control (10) y un primer accionador (11), que se acopla al elemento de mando, controlando la unidad de control por lo menos el primer accionador basándose en una señal que se origina en el primer sensor de fuerza, caracterizado porque
los medios comprenden asimismo un primer sensor de posición (7) para determinar la posición del elemento de 10 trabajo (4) con respecto al bastidor (2),
porque la unidad de control (10) determina la impedancia a la que se somete el elemento de trabajo (4) basándose en la fuerza que se ejerce sobre el elemento de trabajo, la posición en la que se encuentra el elemento de trabajo con respecto al bastidor (2) y la velocidad a la que se desplaza el elemento de trabajo con respecto al bastidor, controlando la unidad de control por lo menos en el primer accionador (11) basándose en 15 la impedancia, y
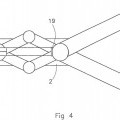
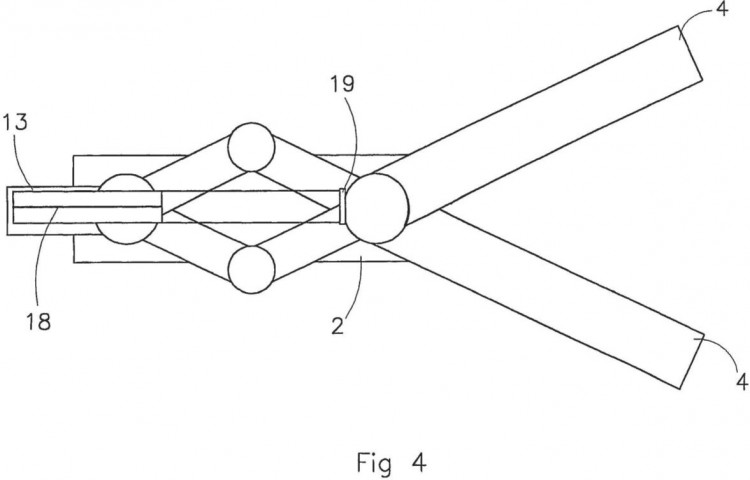
porque el primer sensor de fuerza (6) comprende fibra de vidrio (16) y una superficie reflectora (17), mediante las que una fuente de luz y un sensor de luz se disponen en la proximidad de un primer extremo de la fibra de vidrio, y mediante las que un segundo extremo de la fibra de vidrio y la superficie reflectora se disponen en el elemento de trabajo, de tal modo que una flexión o cambio de forma de dicho elemento de trabajo tiene como 20 resultado un cambio en la posición o la orientación de dicha superficie reflectora con respecto a la fibra de vidrio.
2. Instrumento según la reivindicación 1, caracterizado porque los medios comprenden un segundo sensor de fuerza (8) para medir la fuerza que se ejerce sobre el elemento de mando (3) y un segundo sensor de posición (9) para determinar la posición del elemento de mando con respecto al bastidor. 25
3. Instrumento según la reivindicación 1 o 2, caracterizado porque el instrumento (1) presenta una varilla de unión (13) o elemento similar, que se acopla con el elemento de trabajo (4) y el elemento de mando (3) a fin de accionar el elemento de trabajo.
4. Instrumento según cualquiera de las reivindicaciones 1 a 3, caracterizado porque el instrumento (1) presenta una varilla de unión (13) o elemento similar, que se acopla con el elemento de trabajo (4) a fin de accionar el 30 elemento de trabajo, la varilla de unión o elemento similar que se acciona mediante un segundo accionador (12), que se controla mediante la unidad de control (10).
5. Instrumento según cualquiera de las reivindicaciones 1 a 4, caracterizado porque la unidad de control (10) determina la impedancia a la que se somete el elemento de mando (3) basándose en la fuerza que se ejerce sobre el elemento de mando, la posición en la que el elemento de mando se encuentra con respecto al bastidor 35 (2) y la velocidad a la que se desplaza el elemento de mando con respecto al bastidor, controlando la unidad de control los accionadores (11, 12) basándose en la impedancia a la que se somete el elemento de trabajo (4) y la impedancia a la que se somete el elemento de mando.
6. Instrumento según cualquiera de las reivindicaciones 1 a 5, caracterizado porque por lo menos uno de los sensores de fuerza (6, 8) y/o sensores de posición (7, 9) comprende fibra de vidrio, mediante el que una fuente 40 de luz y un sensor de luz se disponen en la proximidad de un primer extremo de la fibra de vidrio, y mediante el que una superficie reflectora, que se desplaza en función de la posición y/o la fuerza que se va a medir, se dispone a una cierta distancia de un segundo extremo de la fibra de vidrio.
7. Instrumento según cualquiera de las reivindicaciones anteriores, caracterizado porque un segundo extremo de la fibra de vidrio se fija en el elemento de trabajo (4), y mediante el que se dispone una superficie reflectora 45 (17) en el elemento de trabajo (4) a una distancia definida desde el segundo extremo de la fibra de vidrio, cuya superficie reflectora refleja por lo menos una parte de la luz que proviene de la fuente de luz y emerge del segundo extremo de la fibra de vidrio en el segundo extremo de la fibra de vidrio.
8. Instrumento según cualquiera de las reivindicaciones anteriores, caracterizado porque el primer sensor de posición (7) comprende una fibra de vidrio (18), por el que una fuente de luz y un sensor de luz se sitúan en las 50 proximidades de un primer extremo de la fibra de vidrio, y un segundo extremo de la fibra de vidrio dispuesto en el bastidor, y mediante el cual una superficie reflectora (17) que se coloca a cierta distancia del segundo extremo de la fibra de vidrio se dispone en el elemento de trabajo (4), cuya superficie reflectora (19) por lo menos en parte refleja la luz que se origina en la fuente de luz y emerge desde el segundo extremo de la fibra de vidrio en el segundo extremo de la fibra de vidrio. 55
9. Instrumento según cualquiera de las reivindicaciones anteriores, caracterizado porque los accionadores (11, 12) son accionadores electromagnéticos lineales.
10. Instrumento según cualquiera de las reivindicaciones anteriores, caracterizado porque el instrumento (1) comprende por lo menos dos partes que se pueden separar entre sí, de las que una parte es apta para reutilizar y la otra parte es apta para un solo uso, pudiendo las dos partes acoplarse entre sí mediante un 5 acoplamiento.
11. Instrumento según la reivindicación 10, caracterizado porque el acoplamiento comprende un acoplamiento mecánico (14) y un acoplamiento óptico (15).
12. Instrumento según cualquiera de las reivindicaciones 10 o 11, caracterizado porque la parte que es apta para reutilizar comprende por lo menos los accionadores (11, 12), la unidad de control (10), la fuente de luz, el 10 sensor de luz y el elemento de mando (3), y porque la parte que es apta para un solo uso comprende por lo menos el elemento de trabajo (4) y las fibras de vidrio (16, 18).
13. Instrumento según cualquiera de las reivindicaciones anteriores, caracterizado porque los accionadores (11, 12), la unidad de control (10), las fuentes de luz y/o los sensores de luz se alojan en una carcasa estanca.
Patentes similares o relacionadas:
UN MECANISMO LIMITADOR DE UNA HERRAMIENTA, del 1 de Julio de 2011, de Stanmore Implants Worldwide Limited: Un mecanismo limitador de una herramienta que comprende un manipulador y un mecanismo de centrado remoto montado en el mismo, proporcionando […]
SISTEMA QUIRÚRGICO ULTRASÓNICO, del 24 de Junio de 2011, de ETHICON ENDO-SURGERY, INC.: - Un sistema quirúrgico ultrasónico que comprende: una unidad ultrasónica que incluye un instrumento conectado operativamente a un generador […]
PLATAFORMA ROBOTIZADA CON MÚLTIPLES APLICACIONES PARA NEUROCIRUGÍA Y PROCEDIMIENTO DE REAJUSTE, del 21 de Junio de 2011, de MEDTECH S.A: Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende: - una consola de planificación que integra […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Unidad de control unible a un endoscopio que tiene un árbol que puede desviarse a través de dos mandos rotatorios para permitir la operación de los mandos con una man, del 24 de Junio de 2020, de Human XTensions Ltd: Una unidad de control unible a un endoscopio , teniendo el endoscopio dos mandos rotatorios externos y un árbol que puede desviarse a través de los dos […]