Implementación de aproximaciones de descenso continuo para máxima previsibilidad en aeronaves.
El sistema de gestión de aeronaves para su uso en la gestión de aeronaves (4) en vuelos de aproximación de descenso continuo dentro de un aeropuerto,
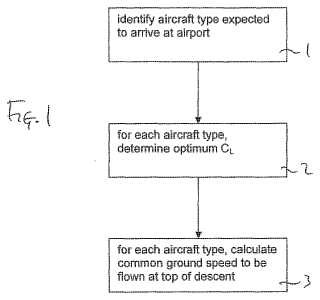
en el que el sistema está dispuesto: para determinar (1) los tipos de aeronaves que se espera que vuelen dentro del aeropuerto; para determinar (2), para cada uno de los tipos de aeronave, un coeficiente óptimo de sustentación que proporciona la máxima previsibilidad en el tiempo de vuelo para la aproximación de descenso continuo y el ángulo de la trayectoria de vuelo aerodinámico resultante (Y TAS) a mantener por la aeronave durante la aproximación de descenso continuo; y para calcular (3) una velocidad de tierra común aplicable a todas los tipos de aeronaves para el vuelo de las aeronaves en la parte superior del descenso (5) de sus aproximaciones de descenso continuo, en las que la velocidad de tierra común se calcula usando los coeficientes óptimos de sustentación determinados para los tipos de aeronaves.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07380053.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 North Riverside Chicago, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FIGLAR,BASTIAN, GOMEZ,RAMON, NAVARRO,FRANCISCO A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C23/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
- G05D1/06 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
- G08G5/02 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Ayudas para el aterrizaje automático, es decir, sistemas en los que los datos de los vuelos de aviones que llegan son tratados para suministrar los datos de aterrizaje (ayudas al aterrizaje a bordo de aeronaves, o medidas de seguridad a bordo de la nave para evitar la colisión con la superficie de la tierra B64D 45/04; ayudas al aterrizaje visuales o acústicas en tierra o en cubierta de portaviones B64F 1/18).
PDF original: ES-2324561_T3.pdf
Fragmento de la descripción:
Implementación de aproximaciones de descenso continuo para máxima previsibilidad en aeronaves
Campo de la invención
La presente invención se refiere a métodos de cálculo y aproximaciones de descenso continuo del vuelo a un aeropuerto o similares, y a los sistemas de navegación de aeronaves para la implementación de estos métodos.
Antecedentes de la Invención
Típicamente, una aeronave se aproximará a un aeropuerto bajo la supervisión de los controladores de tráfico aéreo.
Los controladores del tráfico aéreo se ocupan de asegurar una llegada segura de aeronaves a su destino, mientras que también se asegura que se maximiza la capacidad del aeropuerto. Este último requisito se cumple generalmente asegurando que se mantienen las separaciones mínimas especificadas entre aeronaves. El control del tráfico aéreo está sujeto a incertidumbres que puede actuar de forma que erosionan la separación entre aeronaves tales como vientos variables, tanto en velocidad como en dirección, y las diferentes prácticas de los pilotos. Sin embargo, pueden operar una gran cantidad de aeronaves con seguridad confinadas en un espacio relativamente pequeño ya que el control del tráfico aéreo puede corregir estas incertidumbres a un nivel táctico usando navegación basada en el radar, cambios de velocidad y/o cambios de altitud. Como resultado, una aproximación típica a un aeropuerto involucrará una aproximación por pasos donde se autorizará a la aeronave a descender por pasos a altitudes sucesivamente más bajas según lo permitan los otros tráficos aéreos.
El ruido del tráfico aéreo alrededor de los aeropuertos tiene una importancia social, consecuencias políticas y económicas para las autoridades del aeropuerto, las líneas aéreas y las comunidades. Un modo asequible abordar el problema del ruido en la proximidad de los aeropuertos es desarrollar nuevos procedimientos de navegación que reducen el número de aeronaves que vuelan sobre áreas sensibles a baja altitud con entornos de alto empuje y/o configuraciones aerodinámicas no limpias (por ejemplo con el tren de aterrizaje y/o alerones desplegados) .
Desafortunadamente, las aproximaciones convencionales de bajada por etapas actúan exacerbando este problema ya que la aeronave se mantiene a bajas altitudes, donde el empuje de los motores debe ser suficiente para mantener el vuelo plano.
Las aproximaciones de descenso continuo (CDA) son bien conocidas. Estas aproximaciones ven la aproximación de una aeronave a un aeropuerto descendiendo continuamente con los motores puestos al ralentí o próximos al ralentí.
La Patente de los Estados Unidos Nº 4.825.374 describe una implementación de aproximación de descenso continuo típica en la que la aeronave actúa durante la aproximación usando una ley de control que mantiene una velocidad del aire constante alterando la altitud de la aeronave. El documento US 2006/0265110 resuelve el problema de cuándo cambiar la configuración de una aeronave volando en aproximación de descenso continuo. Las diferentes leyes de control se usan durante las diferentes fases de la aproximación.
Claramente, las aproximaciones de descenso continuo son altamente beneficiosas en términos de ruido ya que aseguran que la aeronave se mantiene tan alta como sea posible por encima de las áreas sensibles mientras que al mismo tiempo se reduce la producción de ruido en la fuente mediante el uso óptimo de motores y alerones. Las aproximaciones de descenso continuo también benefician la eficacia de combustible y minimizan el tiempo de vuelo. Sin embargo, las aproximaciones de descenso continuo deben planearse en detalle antes de comenzar la aproximación y no pueden estar sujetas a correcciones tácticas para asegurar la separación de seguridad de las aeronaves como las que se utilizan en las aproximaciones de bajada por pasos convencionales. Esto obliga a los controladores de tráfico aéreo a imponer grandes separaciones entre aeronaves para garantizar que la llegada de la aeronave al aeropuerto está separada por una distancia de seguridad, teniendo en cuenta las diferencias potenciales en la separación de aeronaves como resultado de los cambios de viento y otras incertidumbres. Tales aumentos en la separación dan como resultado una reducción indeseable en la capacidad del aeropuerto.
La penalización de la capacidad asociada con que las aproximaciones de descenso continuo impide un uso extenso en los aeropuertos y, hasta la fecha, las aproximaciones de descenso continuo sólo se han usado en aeropuertos con bajos niveles de tráfico aéreo o aeropuertos más ocupados durante tiempos de reposo (por ejemplo, por la noche) . De este modo, es deseable tener procedimientos de aproximación de descenso continuo que minimicen las incertidumbres en la posición y los registros de velocidad de tierra de la aeronave, y como resultado, en los tiempos de llegada de las aeronaves. Esto permitiría a los controladores aéreos reducir con seguridad la separación entre aeronaves, satisfaciendo de este modo las necesidades de capacidad de los aeropuertos modernos.
Sumario de la invención
Frente a estos antecedentes y desde un primer aspecto, la presente invención reside en un sistema de navegación de aeronaves dispuesto para calcular una parte del plan de vuelo de la aeronave que efectúa una aproximación de descenso continuo con los motores de la aeronave puestos sustancialmente al ralentí, estando dispuesto el sistema de navegación de la aeronave para determinar un ángulo de la trayectoria de vuelo aerodinámico a mantener durante el vuelo de la parte de descenso del plan de vuelo de tal modo que manteniendo el ángulo mientras vuela la parte de descenso del plan de vuelo produce una mínima variación en el coeficiente de sustentación.
Se ha encontrado que operando una ley de control de vuelo durante una aproximación de descenso continuo que mantiene un ángulo de la trayectoria de vuelo aerodinámico especificado produce la incertidumbre mínima en el tiempo de llegada de las aeronaves que vuelan esa aproximación. La reducción en la incertidumbre es impresionante sobre la ley de control favorecida actualmente usada cuando se vuela en las aproximaciones de descenso continuo, a saber para mantener una velocidad aérea constante. También se ven mejoras sobre otras leyes de control tales como el mantenimiento de una tasa constante de descenso o incluso el mantenimiento de un ángulo geométrico de la trayectoria de vuelo constante.
El sistema de navegación de la aeronave está dispuesto para determinar el ángulo de la trayectoria de vuelo aerodinámico de modo que manteniendo el ángulo mientras se vuela la parte de descenso del plan de vuelo se produce una variación mínima en el coeficiente de sustentación. Puesto de otra forma, se determina que el ángulo de la trayectoria de vuelo aerodinámico muestra sólo una variación mínima entre la parte superior y la parte inferior del descenso de la aproximación de descenso continuo.
Como el ángulo de la trayectoria de vuelo aerodinámico óptimo es probable que varíe para cualquier tipo de aeronave particular, y puede variar incluso para diferentes modelos dentro de ese tipo, el sistema de navegación de aeronaves está preferiblemente dispuesto para calcular el ángulo de la trayectoria de vuelo aerodinámico con referencia al tipo de aeronave. Probablemente también se usarán parámetros adicionales cuando se calcula el ángulo de la trayectoria de vuelo aerodinámico. Opcionalmente, el sistema de navegación de la aeronave está dispuesto para calcular el ángulo de la trayectoria de vuelo aerodinámico con referencia a cualquiera de, el peso de la aeronave (preferiblemente un valor correspondiente al peso en la parte superior del descenso) , el gradiente del viento y el viento esperados y las condiciones atmosféricas esperadas. Preferiblemente, el sistema de navegación de la aeronave está dispuesto para recibir una altitud de la parte superior del descenso (TOD) y una velocidad de tierra objetivo en ese punto, y para calcular el ángulo de la trayectoria de vuelo aerodinámico a mantener durante el descenso desde ese punto. El sistema de navegación de la aeronave puede recibir sólo la altitud de la parte superior del descenso, pero puede recibir también la posición de la parte superior de descenso. Esta puede ser unas coordenadas, especificando, por ejemplo, la longitud y la latitud, o puede ser un punto de referencia sobre la tierra tal como un punto de referencia en el espacio.
Opcionalmente,... [Seguir leyendo]
Reivindicaciones:
1.El sistema de gestión de aeronaves para su uso en la gestión de aeronaves (4) en vuelos de aproximación de descenso continuo dentro de un aeropuerto, en el que el sistema está dispuesto: para determinar (1) los tipos de aeronaves que se espera que vuelen dentro del aeropuerto; para determinar (2) , para cada uno de los tipos de aeronave, un coeficiente óptimo de sustentación que proporciona la máxima previsibilidad en el tiempo de vuelo para la aproximación de descenso continuo y el ángulo de la trayectoria de vuelo aerodinámico resultante (YTAS) a mantener por la aeronave durante la aproximación de descenso continuo; y para calcular (3) una velocidad de tierra común aplicable a todas los tipos de aeronaves para el vuelo de las aeronaves en la parte superior del descenso (5) de sus aproximaciones de descenso continuo, en las que la velocidad de tierra común se calcula usando los coeficientes óptimos de sustentación determinados para los tipos de aeronaves.
2.El sistema de gestión de aeronaves de la reivindicación 1, dispuesto para calcular la velocidad de tierra común determinando una velocidad de tierra para cada uno de los tipos de aeronaves usando el coeficiente óptimo de sustentación asociado con cada uno de los tipos particulares, y calcular la velocidad de tierra común en base a un promedio de las velocidades de tierra determinadas para cada uno de los tipos de aeronaves.
3.El sistema de gestión de aeronaves de la reivindicación 2, dispuesto para calcular la velocidad de tierra común calculando una promedio ponderado de las velocidades de tierra determinadas para cada uno de los tipos de aeronaves en base a la proporción esperada de aproximaciones de descenso continuo a volar por ese tipo de aeronave.
4.El sistema de gestión de aeronaves de la reivindicación 2 ó la reivindicación 3, dispuesto para calcular la velocidad de tierra VG para cada uno de los tipos de aeronaves de acuerdo con
VG = VTAS -VWIND
donde VWIND es la velocidad del viento en la parte superior del descenso, y
donde WTOD es el peso típico del tipo de aeronave en la parte superior del descenso, ρTOD es la densidad del aire en la parte superior del descenso, S es el área de las alas del tipo de aeronave y CL (MP) es el coeficiente óptimo de sustentación para el tipo de aeronave.
5.El sistema de gestión de aeronaves de la reivindicación 1, dispuesto para calcular la velocidad de tierra común determinando un coeficiente óptimo promedio de sustentación a partir de los coeficientes óptimos de sustentación calculados para los diferentes tipos de aeronaves y que usa este coeficiente óptimo de sustentación promedio para determinar la velocidad de tierra común.
6.El sistema de gestión de aeronaves de cualquiera de las reivindicaciones anteriores, dispuesto para determinar el coeficiente óptimo de sustentación para cada uno de los tipos de aeronaves calculando el coeficiente óptimo de
donde
y M es la velocidad (número de Match) , T es el empuje, W es el peso de la aeronave, CL* es el coeficiente de sustentación más eficaz para el tipo de aeronave, y CD0 y CD2 son las polares de resistencia parabólica aerodinámicos usuales.
7.El sistema de gestión de aeronaves de la reivindicación 6, dispuesto para calcular CL* a partir de
donde CD0 y CD2 son las polares de resistencia aerodinámica parabólica usuales.
8. El sistema de gestión de aeronaves de cualquiera de las reivindicaciones anteriores, dispuesto para pasar la velocidad de tierra común a las aeronaves en aproximación al aeropuerto antes de que comiencen sus aproximaciones de descenso continuo.
9.Un sistema de navegación de aeronaves dispuesto para calcular una parte del plan de vuelo de la aeronave que efectúa una aproximación de descenso continuo, con los motores de la aeronave puestos sustancialmente al ralentí, estando dispuesto el sistema de navegación de la aeronave para determinar (12) un ángulo de la trayectoria de vuelo aerodinámico a mantener durante el vuelo de la parte descendente del plan de vuelo de modo que manteniendo el ángulo mientras se vuela la parte descendente del plan de vuelo se produce una variación mínima en el coeficiente de sustentación.
10. El sistema de navegación de aeronaves de la reivindicación 9, dispuesto para realizar simulaciones para determinar el ángulo de la trayectoria de vuelo aerodinámico.
11.El sistema de navegación de aeronaves de la reivindicación 10, dispuesto para correr las simulaciones usando valores de entrada de uno o más de: la altitud de la parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión y la temperatura atmosférica.
12.El sistema de navegación de aeronaves de la reivindicación 9, dispuesto para determinar el ángulo de la trayectoria de vuelo aerodinámico con referencia a una tabla de datos que relacionan los ángulos de las trayectorias de vuelo aerodinámico con parámetros de vuelo.
13. El sistema de navegación de aeronaves de la reivindicación 12, en el que los parámetros de vuelo comprenden uno o más de: la altitud de la parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión atmosférica y la temperatura atmosférica.
14. El sistema de navegación de aeronaves de la reivindicación 12 ó la reivindicación 13, en el que la tabla se produce corriendo simulaciones para determinar el ángulo de la trayectoria de vuelo aerodinámico.
15. El sistema de navegación de aeronaves de la reivindicación 14, en el que las simulaciones se corren usando valores de entrada de uno o más de: la altitud de la parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión atmosférica y la temperatura atmosférica.
16. El sistema de navegación de aeronaves de cualquiera de las reivindicaciones 9 a 15, dispuesto además para recibir la localización de la parte superior del descenso para usar esta localización como el punto de comienzo para la parte de descenso del plan de vuelo.
17. El sistema de navegación de aeronaves de la reivindicación 16, dispuesto además para recibir la localización de la parte inferior del descenso y para terminar la parte del descenso del plan de vuelo en esta localización.
18. El sistema de navegación de aeronaves de cualquiera de las reivindicaciones 9 a 17, dispuesto además para guiar la aeronave a lo largo de una aproximación de descenso continuo, estando dispuesto el sistema de navegación de aeronaves para guiar la aeronave de modo que mantiene el ángulo de la trayectoria de vuelo aerodinámico durante la aproximación de descenso continuo.
19. El sistema de navegación de aeronaves de la reivindicación 18, dispuesto: para guiar la aeronave para volar a la altitud especificada de la parte superior del descenso a la velocidad de tierra especificada; en la localización especificada de la parte superior del descenso, para provocar que los motores de la aeronave que se pongan sustancialmente al ralentí y para guiar a la aeronave de modo que se ajusta su perfil para adoptar el ángulo de la trayectoria de vuelo aerodinámico; y, durante la aproximación de descenso continuo, guiar a la aeronave para asegurar que la aeronave mantiene el ángulo de la trayectoria de vuelo aerodinámico.
20. El sistema de navegación de aeronaves de la reivindicación 19, dispuesto además para guiar la aeronave para asegurar que la aeronave se estabiliza y mantiene el vuelo plano cuando la aeronave alcanza la parte inferior especificada de la altitud de descenso o la parte inferior especificada de la localización del descenso.
21. El sistema de navegación de aeronaves de la reivindicación 20, dispuesto además para provocar que los motores que se mantengan al ralentí de modo que la aeronave decelera a la velocidad del aire especificada.
22.El sistema de navegación de aeronaves de la reivindicación 20 o la reivindicación 21, dispuesto además para guiar (20) a la aeronave para mantener el vuelo plano hasta que se intercepta la pendiente de planeo al destino.
23.Un método implementado por ordenador de gestión de aeronaves (4) en vuelo de aproximaciones de descenso continuo dentro de un aeropuerto, comprendiendo el método: determinar (1) los tipos de aeronaves que se espera que vuelen dentro del aeropuerto; determinar (2) , para cada uno de los tipos de aeronaves, un coeficiente óptimo de sustentación que proporciona la máxima previsibilidad en el tiempo para volar la aproximación de descenso continuo y el ángulo de la trayectoria de vuelo aerodinámico resultante (YTAS) a mantener por la aeronave durante la aproximación de descenso continuo; y calcular (3) una velocidad de tierra común para volar por la aeronave en la parte superior del descenso (5) de sus aproximaciones de descenso continuo, en las que la velocidad de tierra común se calcula usando los coeficientes óptimos de sustentación determinados para los tipos de aeronaves.
24. El método de la reivindicación 23, en el que calcular la velocidad de tierra común comprende determinar una velocidad de tierra para cada uno de los tipos de aeronaves usando el coeficiente óptimo de sustentación asociado con cada uno de los tipos particulares, y calcular la velocidad de tierra común en base a un promedio de las velocidades de tierra determinadas para cada uno de los tipos de aeronave.
25.El método de la reivindicación 24, en el que calcular la velocidad de tierra común comprende calcular un promedio ponderado de las velocidades de tierra determinadas para cada uno de los tipos de aeronave en base a la proporciona esperada de aproximaciones de descenso continuo a volar por ese tipo de aeronave.
26. El método de la reivindicación 24 o la reivindicación 25, que comprende calcular la velocidad de tierra VG para cada uno de los tipos de aeronave de acuerdo con
VG = VTAS -Vwind
donde WTOD es el peso típico del tipo de aeronave en la parte superior del descenso, ρTOD es la densidad del aire en la parte superior del descenso, S es el área de las alas del tipo de aeronave y CL (MP) es el coeficiente óptimo de sustentación para el tipo de aeronave.
27. El método de la reivindicación 23, en el que calcular la velocidad de tierra común comprende determinar un coeficiente óptimo promedio de sustentación a partir de los coeficientes óptimos de sustentación calculados para los diferentes tipos de aeronaves y usar este coeficiente óptimo promedio de sustentación para determinar la velocidad de tierra común.
28.El método de cualquiera de las reivindicaciones 23 a 27, en el que determinar el coeficiente óptimo de sustentación para cada uno de los tipos de aeronaves comprende calcular el coeficientes óptimo de sustentación
y M es la velocidad (número de Match) , T es el empuje, W es el peso de la aeronave, CL* es el coeficiente de sustentación más eficaz para el tipo de aeronave, y CD0 y CD2 son las polares de resistencia parabólica aerodinámicos usuales.
29.El método de la reivindicación 28, que comprende calcular CL* a partir de
donde CD0 y CD2 son las polares de resistencia parabólica aerodinámicos usuales.
30.El método de cualquiera de las reivindicaciones 23 a 29, que comprende pasar la velocidad de tierra común a las aeronaves que se están aproximando al aeropuerto antes de que comiencen sus aproximaciones de descenso continuo.
31.Un método implementado por ordenador para calcular una parte del plan de vuelo de una aeronave que efectúa una aproximación de descenso continuo, con el conjunto de motores de la aeronave sustancialmente al ralentí, comprendiendo el método determinar un ángulo de la trayectoria de vuelo aerodinámico a mantener durante el vuelo de la parte de descenso del plan de vuelo de modo que el mantenimiento del ángulo mientras vuela la parte de
descenso del plan de vuelo produce una variación mínima en el coeficiente de sustentación.
32.El método de la reivindicación 31, que comprende correr simulaciones para determinar el ángulo de la trayectoria de vuelo aerodinámico.
33.El método de la reivindicación 32, que comprende correr las simulaciones usando valores de entrada de uno o más de: la altitud de la parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión atmosférica y temperatura atmosférica.
34.El método de la reivindicación 33, que comprende determinar el ángulo de la trayectoria de vuelo aerodinámico con referencia a una tabla de datos que relaciona los ángulos de las trayectorias de vuelo aerodinámico con los parámetros de vuelo.
35.El método de la reivindicación 34, en el que los parámetros de vuelo comprenden uno o más de: la altitud de la
parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión atmosférica y temperatura atmosférica.
36.El método de la reivindicación 34 ó la reivindicación 35, en el que la tabla se produce corriendo simulaciones para 35 determinar el ángulo de la trayectoria de vuelo aerodinámico.
37.El método de la reivindicación 36, en el que las simulaciones se corren usando valores de entrada de uno o más de: la altitud de la parte superior del descenso, la velocidad de tierra objetivo para volar en la parte superior del descenso, el tipo de aeronave, el peso de la aeronave, la velocidad del viento, el gradiente del viento, la presión
atmosférica y la temperatura atmosférica.
38.El método de cualquiera de las reivindicaciones 31 a 37, que comprende recibir la localización de la parte superior del descenso (5) y usar esta localización como punto de comienzo para la parte de descenso del plan de vuelo.
45 39.El método de la reivindicación 38, que comprende recibir la localización de la parte inferior del descenso y que termina la parte de descenso del plan de vuelo en esta localización.
40.Un método de guiado de una aeronave (4) para volar la parte del plan de vuelo de la aeronave calculada de
50 acuerdo con cualquiera de las reivindicaciones de 31 a 39, que sigue por lo tanto la aproximación de descenso continuo guiando la aeronave de modo que se mantiene el ángulo de la trayectoria de vuelo aerodinámico durante la aproximación de descenso continuo que produce una variación mínima en el coeficiente de sustentación.
41.El método de la reivindicación 40, que comprende: guiar a la aeronave para que vuele a la altitud especificada de
55 la parte superior del descenso a la velocidad de tierra especificada; en la localización especificada de la parte superior del descenso, provocando que los motores de la aeronave se fijen sustancialmente al ralentí y guiar la aeronave de modo que su perfil se ajuste para adoptar el ángulo de la trayectoria de vuelo aerodinámico; y, durante la aproximación de descenso continuo, guiar la aeronave para asegurar que la aeronave mantiene el ángulo de la trayectoria de vuelo aerodinámico.
60 42.El método de la reivindicación 41, que comprende guiar la aeronave para asegurar que la aeronave se estabiliza y mantiene un vuelo plano cuando la aeronave alcanza la parte inferior especificada de la altitud del descenso o la parte inferior especificada de la localización de descenso.
43.El método de la reivindicación 42, que comprende provocar que los motores se mantengan al ralentí de modo que la aeronave decelera a la velocidad del aire especificada.
44.El método de la reivindicación 42 o la reivindicación 43, que comprende guiar (22) la aeronave para que mantenga un vuelo plano hasta que se intercepte la pendiente de planeo para el destino. 10 45.Un ordenador programado para funcionar de acuerdo con cualquiera de los métodos de 23 a 44.
46.Un programa de ordenador que cuando se ejecuta sobre un ordenador, hace que el ordenador implemente los métodos de cualquiera de las reivindicaciones 23 a 44. 15 47.Un medio legible por ordenador que realiza un programa de ordenador de acuerdo con la reivindicación 46.
Patentes similares o relacionadas:
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Método y sistema para controlar el vuelo de una aeronave sometida a al menos dos tiempos requeridos de restricciones de llegada, del 3 de Abril de 2019, de THE BOEING COMPANY: Un método para controlar el vuelo de una aeronave sometida a dos restricciones de tiempo de llegada requeridas, que comprende la etapa de: a) recibir dos tiempos […]
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo, del 8 de Enero de 2019, de THE BOEING COMPANY: Un método que comprende: determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave […]
Procedimiento y dispositivo de calibración de sistemas de aproximación de aeropuertos mediante el uso de naves no tripuladas, del 29 de Octubre de 2018, de CANARD DRONES S.L: Procedimiento y sistema para el calibrado o ajuste de sistemas visuales de ayuda para el aterrizaje de aeronaves (VGSI) que se realiza con una aeronave capaz de realizar […]
Deflexiones de dispositivo de borde de ataque y de salida durante el descenso de una aeronave, del 25 de Septiembre de 2018, de THE BOEING COMPANY: Sistema para aumentar una velocidad de descenso de una aeronave, comprendiendo el sistema: un ordenador de control de vuelo configurado para calcular un primer […]