HERRAMIENTA DE APLICACIÓN DE ELEMENTOS DE FIJACIÓN CON CONTROL DE PROFUNDIDAD AJUSTABLE Y MÉTODO.
Herramienta (2) de aplicación de elementos de fijación para aplicar axialmente un elemento (8) de fijación en un sustrato (4),
comprendiendo la herramienta (2) de aplicación de elementos de fijación:
- un cuerpo (20a; 20b) de herramienta que tiene un cilindro con un eje (24), encerrando el cilindro un émbolo (12), en la que el émbolo (12) es accionado en una dirección de aplicación;
- una sonda (14) de control de profundidad; y - un tope (46), en la que una superficie (37) del émbolo (12) golpea una superficie posterior (68) del tope (46) después de haber aplicado el elemento (8) de fijación;
en la que la sonda (14) de control de profundidad es móvil con respecto al cuerpo (20a; 20b) de herramienta entre una posición extendida y una posición retraída; y en la que la sonda (14) de control de profundidad crea un espacio que tiene una longitud predeterminada (L) entre una superficie del sustrato (14) y la superficie posterior (68) del tope (46),
caracterizada porque
el tope (46) está retenido en el interior de una parte de la sonda (14) de control de profundidad, de modo que el tope
(46) y la sonda (14) de control de profundidad se mueven conjuntamente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03019710.
B25C1/14TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25C HERRAMIENTAS MANUALES PARA CLAVAR O GRAPAR; HERRAMIENTAS PORTATILES PARA GRAPAR ACCIONADAS POR FUERZA MUSCULAR (para la fabricación de calzados A43D). › B25C 1/00 Herramientas manuales para clavar (martillos en sí B25D; detalles o partes constitutivas, p. ej. carcasas o cuerpos de herramientas portátiles a motor no relacionadas particularmente con la operación efectuada B25F 5/00; máquinas para clavar B27F 7/02 ); Dispositivos de alimentación de clavos para estas herramientas. › actuando sobre una cabeza o una pieza intermediaria (pistolas para matar animales A22B 3/02).
Clasificación antigua:
B25C1/14B25C 1/00 […] › actuando sobre una cabeza o una pieza intermediaria (pistolas para matar animales A22B 3/02).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
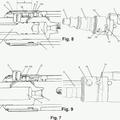
Herramienta de aplicación de elementos de fijación con control de profundidad ajustable y método ANTECEDENTES DE LA INVENCIÓN 1. Campo de la invención La presente invención se refiere a una herramienta de aplicación de elementos de fijación para aplicar axialmente un elemento de fijación según el preámbulo de la reivindicación 1 y a un método de control de la profundidad de aplicación de una herramienta de aplicación de elementos de fijación según el preámbulo de la reivindicación 15. Tal herramienta y tal método de aplicación de elementos de fijación son conocidos por US-A-5 261 587. 2. Descripción de la técnica relacionada ES 2 366 213 T3 Las herramientas de aplicación de elementos de fijación portátiles para aplicar grapas, clavos y otros elementos de fijación son ampliamente usadas para la unión de sustratos. Se han realizado numerosas herramientas de aplicación de elementos de fijación para controlar la profundidad de aplicación de los elementos de fijación. En el pasado, debido a que cada elemento de fijación es aplicado normalmente con la misma cantidad de energía cada vez que la herramienta es activada, el control eficaz de la profundidad de aplicación ha resultado difícil. Es conocido que los elementos de fijación son aplicados a una profundidad inconsistente cuando existe una variación en la densidad de los sustratos en los que se aplican los elementos de fijación, por ejemplo, maderas blandas y duras. De forma adicional, resulta deseable poder seleccionar de forma consistente la profundidad a la que se aplicará el elemento de fijación dependiendo de la aplicación. En algunas aplicaciones, a efectos estéticos, resulta deseable aplicar los elementos de modo que los mismos queden dispuestos de forma avellanada debajo de la superficie del sustrato. En otras aplicaciones, puede resultar deseable que la cabeza del elemento de fijación quede alineada con la superficie del sustrato y, en otras aplicaciones, puede ser necesario que la cabeza del elemento de fijación sobresalga con respecto a la superficie del sustrato. En la técnica se han descrito varios controles de profundidad de aplicación, tal como en las patentes US 5.261.587 y 6.012.622, de titularidad común, de Robinson y Weinger y col., respectivamente, cuyas descripciones se incorporan como referencia en la presente memoria. ITW-Duo-Fast y ITW-Paslode comercializan herramientas de aplicación de elementos de fijación similares que usan controles de profundidad de aplicación. Muchas de las herramientas descritas anteriormente tienen una carcasa generalmente en forma de herramienta con una punta. En las herramientas de aplicación de elementos de fijación el control de profundidad se ha conseguido mediante un mecanismo de control de la herramienta, al que se hace referencia de forma habitual como sonda de aplicación, que es presionada contra la superficie del sustrato y que es móvil axialmente con respecto a la punta para ajustar el espacio entre el sustrato y la carcasa. Un problema conocido que se produce en muchas de las herramientas y controles de profundidad descritos anteriormente es la inconsistencia de la profundidad de aplicación, que depende de la cantidad de fuerza de aplicación y retroceso creada. Por ejemplo, muchas herramientas son capaces de variar la cantidad de energía de aplicación suministrada, tal como aumentado o disminuyendo el suministro de presión de aire a la herramienta, lo que modifica la profundidad de aplicación del elemento de fijación. Además, son conocidas herramientas de aplicación de elementos de fijación, incluyendo la sonda de aplicación, que retroceden en alejamiento con respecto al sustrato después de su activación. Debido a que la sonda de aplicación es una parte integrada en el cuerpo de herramienta, la sonda de aplicación retrocede con el cuerpo de herramienta, de modo que la sonda de aplicación se aleja del sustrato cuando el émbolo está aplicando el elemento de fijación. También son conocidas herramientas que retroceden a diferentes velocidades, de modo que el control de profundidad del elemento de fijación es menos predecible, ya que el émbolo es accionado a diferentes profundidades con respecto a la superficie del sustrato. Otro problema que se produce consiste en la imprecisión al aplicar un elemento de fijación en un sustrato. Como consecuencia del movimiento de retroceso descrito anteriormente, la sonda de aplicación abandona la superficie del sustrato cuando la herramienta es activada, haciendo que una parte del proceso de aplicación del elemento de fijación no esté guiada. Por lo tanto, es posible que el elemento de fijación no sea aplicado de forma precisa y recta en el sustrato. Es conocido otro problema que se produce cuando el émbolo finaliza su primer accionamiento y contacta con una parte de la herramienta. La energía de aplicación es transmitida hacia delante, dejando la herramienta una marca de impacto en la superficie del sustrato. A este fenómeno se hace referencia habitualmente como segundo impacto. Es necesario un control de profundidad de aplicación para una herramienta de aplicación de elementos de fijación que controle de forma eficaz, precisa y consistente la profundidad de aplicación de un elemento de fijación bajo diversas condiciones de funcionamiento, siendo al mismo tiempo capaz de controlar estas últimas. 2 BREVE RESUMEN DE LA INVENCIÓN Según la presente invención, se da a conocer una herramienta de aplicación de elementos de fijación según la reivindicación 1 y que tiene un nuevo control de profundidad de aplicación. La herramienta de aplicación de elementos de fijación incluye, entre otras cosas, un cuerpo de herramienta que tiene un cilindro con un eje, en la que el cilindro encierra un émbolo y en la que el émbolo es accionado en una dirección de aplicación, una sonda de control de profundidad y un tope asociado a la sonda de control de profundidad, teniendo el tope una superficie posterior, en la que la sonda de control de profundidad es móvil con respecto al cuerpo de herramienta entre una posición extendida y una posición retraída, en la que la sonda de control de profundidad crea un espacio que tiene una longitud predeterminada entre una superficie de un sustrato y la superficie posterior del tope y en la que una superficie del émbolo golpea la superficie posterior del tope después de haber aplicado el elemento de fijación. También según la presente invención, se da a conocer un método de control de la profundidad de aplicación de una herramienta de aplicación de elementos de fijación. El método incluye las etapas de disponer una herramienta de aplicación de elementos de fijación que tiene un cuerpo de herramienta con un eje, encerrando el cuerpo de herramienta un émbolo, una sonda de control de profundidad, un tope asociado a la sonda de control de profundidad, teniendo el tope una superficie posterior, en el que la sonda de control de profundidad es móvil con respecto al cuerpo de herramienta, y en el que la sonda de control de profundidad crea un espacio de una longitud predeterminada entre una superficie de un sustrato y la superficie posterior del tope, empujar la sonda de control de profundidad contra la superficie del sustrato, activar la herramienta, de modo que el émbolo es accionado en una dirección de aplicación, aplicar un elemento de fijación en la dirección de aplicación con el émbolo, golpear la superficie posterior del tope con el émbolo, de modo que el émbolo deja de moverse en la dirección de aplicación. En las reivindicaciones dependientes se describen otras realizaciones ventajosas. Estos y otros objetivos, características y ventajas resultarán evidentes a partir de la siguiente descripción de una realización de la presente invención, haciendo referencia a los dibujos que se acompañan. BREVE DESCRIPCIÓN DE LAS DISTINTAS VISTAS DE LOS DIBUJOS La FIG. 1 es una vista en sección lateral parcial de la herramienta de aplicación de elementos de fijación, que tiene una primera realización de un control de profundidad. La FIG. 2 es una vista en sección lateral de la primera realización del control de profundidad de la herramienta de aplicación de elementos de fijación (mostrada sin la carcasa de la herramienta) antes de activar la herramienta. La FIG. 3 es una vista en sección lateral de la primera realización del control de profundidad (mostrada sin la carcasa de la herramienta) después de haber activado la herramienta de aplicación de elementos de fijación, aunque antes de que una superficie de elevación haya iniciado la elevación de una sonda de control de profundidad separándola de un sustrato. La FIG. 4 es una vista en sección lateral de la primera realización del control de profundidad (mostrada sin la carcasa de la herramienta) después de que la superficie de elevación ha elevado la sonda de control de profundidad... [Seguir leyendo]
Reivindicaciones:
1. Herramienta (2) de aplicación de elementos de fijación para aplicar axialmente un elemento (8) de fijación en un sustrato (4), comprendiendo la herramienta (2) de aplicación de elementos de fijación: - un cuerpo (20a; 20b) de herramienta que tiene un cilindro con un eje (24), encerrando el cilindro un émbolo (12), en la que el émbolo (12) es accionado en una dirección de aplicación; - una sonda (14) de control de profundidad; y - un tope (46), en la que una superficie (37) del émbolo (12) golpea una superficie posterior (68) del tope (46) después de haber aplicado el elemento (8) de fijación; en la que la sonda (14) de control de profundidad es móvil con respecto al cuerpo (20a; 20b) de herramienta entre una posición extendida y una posición retraída; y en la que la sonda (14) de control de profundidad crea un espacio que tiene una longitud predeterminada (L) entre una superficie del sustrato (14) y la superficie posterior (68) del tope (46), caracterizada porque ES 2 366 213 T3 el tope (46) está retenido en el interior de una parte de la sonda (14) de control de profundidad, de modo que el tope (46) y la sonda (14) de control de profundidad se mueven conjuntamente. 2. Herramienta de aplicación de elementos de fijación según la reivindicación 1, que comprende además una superficie (90) de elevación asociada funcionalmente al cuerpo (20a; 20b) de herramienta y una superficie (92) de retroceso asociada funcionalmente a la sonda (14) de control de profundidad, en la que la superficie (92) de retroceso está separada de la superficie (90) de elevación cuando la sonda (14) de control de profundidad está en posición retraída, y en la que la superficie (90) de elevación está situada junto a la superficie (92) de retroceso cuando la sonda (14) de control de profundidad está en posición extendida. 3. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que la superficie (92) de retroceso está asociada a un extremo posterior (56) de la sonda (14) de control de profundidad. 4. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que la superficie (90) de elevación está en contacto con la superficie (92) de retroceso cuando la sonda (14) de control de profundidad está en la segunda posición. 5. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que existe un espacio que tiene una distancia predeterminada (D) entre la superficie (92) de retroceso y la superficie (90) de elevación cuando la sonda (14) de control de profundidad está en posición retraída. 6. Herramienta de aplicación de elementos de fijación según la reivindicación 5, que comprende además una superficie (94a; 94b) de separación asociada funcionalmente al cuerpo (20a; 20b) de herramienta y una superficie (96a; 96b) de tope asociada funcionalmente a la sonda (14) de control de profundidad, en la que la superficie (96a; 96b) de tope está en contacto con la superficie (94a; 94b) de separación cuando la sonda (14) de control de profundidad está en posición retraída y en la que existe un espacio que tiene la distancia predeterminada (D) entre la superficie (96a; 96b) de tope y la superficie (94a; 94b) de separación cuando la sonda (14) de control de profundidad está en posición extendida. 7. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que la superficie (90) de elevación está orientada generalmente en alejamiento con respecto a la dirección de aplicación. 8. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que la superficie (92) de retroceso está orientada generalmente en la dirección de aplicación. 9. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que una parte de la sonda (14) de control de profundidad está separada radialmente en el interior de una parte del cuerpo (20a; 20b) de herramienta, y en la que la superficie (90) de elevación está situada en un borde del cuerpo (20a; 20b) de herramienta que se extiende radialmente hacia dentro y la superficie (92) de retroceso está 11 situada en un borde (60) de la sonda (14) de control de profundidad que se extiende radialmente hacia fuera. 10. Herramienta de aplicación de elementos de fijación según la reivindicación 2, en la que el cuerpo (20a; 20b) de herramienta se mueve en una dirección generalmente opuesta a la dirección de aplicación después de haber activado la herramienta (2) de aplicación de elementos de fijación. 11. Herramienta de aplicación de elementos de fijación según la reivindicación 10, en la que el cuerpo (20a; 20b) de herramienta se mueve de modo que la sonda (14) de control de profundidad cambia de la posición retraída a la posición extendida, y en la que la sonda (14) de control de profundidad permanece generalmente fija y guía un elemento (8) de fijación mientras el cuerpo (20a; 20b) de herramienta se mueve entre las posiciones retraída y extendida. 12. Herramienta de aplicación de elementos de fijación según la reivindicación 10, en la que el cuerpo (20a; 20b) de herramienta se mueve de modo que la sonda (14) de control de profundidad cambia de la posición retraída a la posición extendida, de modo que la superficie (90) de elevación contacta con la superficie (92) de retroceso y eleva la sonda (14) de control de profundidad separándola del sustrato (4). 13. Herramienta de aplicación de elementos de fijación según la reivindicación 1, en la que una parte de la sonda (14) de control de profundidad es ajustable axialmente con respecto al cuerpo (20a; 20b) de herramienta. 14. Herramienta de aplicación de elementos de fijación según la reivindicación 1, en la que la sonda (14) de control de profundidad incluye una superficie (66) de contacto con el sustrato, y en la que la sonda (14) de control de profundidad está en posición retraída cuando la superficie (66) de contacto con el sustrato es empujada contra un sustrato (4). 15. Método de control de la profundidad de aplicación de una herramienta (2) de aplicación de elementos de fijación, comprendiendo el método las etapas de: - disponer una herramienta (2) de aplicación de elementos de fijación que tiene: un cuerpo (20a; 20b) de herramienta con un eje (24), encerrando el cuerpo (20a; 20b) de herramienta un émbolo (12); una sonda (14) de control de profundidad; y un tope (46); - empujar la sonda (14) de control de profundidad contra la superficie de un sustrato (4), - activar la herramienta (2) de aplicación de elementos de fijación, de modo que el émbolo (12) es accionado en una dirección de aplicación; - aplicar un elemento (8) de fijación en la dirección de aplicación con el émbolo (12); y - golpear una superficie posterior (68) del tope (46) con el émbolo (12), de modo que el émbolo (12) deja de moverse en la dirección de aplicación, caracterizado porque el tope (46) está retenido en el interior de una parte de la sonda (14) de control de profundidad, de modo que el tope (46) y la sonda (14) de control de profundidad se mueven conjuntamente, en el que la sonda (14) de control de profundidad es móvil con respecto al cuerpo (20a; 20b) de herramienta entre una posición retraída y una posición extendida, en el que la sonda (14) de control de profundidad crea un espacio de una longitud predeterminada (L) entre una superficie de un sustrato (4) y la superficie posterior (68) del tope (46). 16. Método según la reivindicación 15, en el que el émbolo (12) incluye un extremo (39) de aplicación y una superficie (37) de émbolo, teniendo el émbolo (12) una longitud extendida (P) entre el extremo (39) de aplicación y la superficie (37) de émbolo. 17. Método según la reivindicación 16, en el que la longitud extendida (P) del émbolo (12) es más corta que la longitud predeterminada (L), de modo que una cabeza (40) del elemento (8) de fijación es aplicada a una profundidad sobre la superficie del sustrato (4) igual a la diferencia entre la longitud extendida (P) del émbolo (12) y la longitud predeterminada (L). 18. Método según la reivindicación 16, en el que ES 2 366 213 T3 12 la longitud extendida (P) del émbolo (12) es generalmente igual a la longitud predeterminada (L), de modo que una cabeza (40) del elemento (8) de fijación es aplicada a una profundidad sustancialmente alineada con la superficie del sustrato (4). 19. Método según la reivindicación 16, en el que la longitud extendida (P) del émbolo (12) es más larga que la longitud predeterminada (L), de modo que una cabeza (40) del elemento (8) de fijación es aplicada a una profundidad debajo de la superficie del sustrato (4) igual a la diferencia entre la longitud extendida (P) del émbolo (12) y la longitud predeterminada (L). 20. Método según la reivindicación 15, que comprende además la etapa de ajustar la longitud predeterminada (L). 21. Método según la reivindicación 15, en el que la herramienta (2) incluye una superficie (92) de retroceso asociada funcionalmente a la sonda (14) de control de profundidad y una superficie (90) de elevación asociada funcionalmente al cuerpo (20a; 20b) de herramienta. 22. Método según la reivindicación 21, que comprende además la etapa de hacer retroceder el cuerpo (20a; 20b) de herramienta, de modo que la superficie (90) de elevación contacta con la superficie (92) de retroceso. 23. Método según la reivindicación 22, en el que el cuerpo (20a; 20b) de herramienta retrocede una distancia predeterminada (D) antes de que la superficie (90) de elevación contacta con la superficie (92) de retroceso, comprendiendo además la etapa de ajustar la distancia predeterminada (D). 24. Método según la reivindicación 21, que comprende además la etapa de elevar la sonda (14) de control de profundidad separándola del sustrato (4) con la superficie (90) de elevación. 25. Método según la reivindicación 24, en el que la etapa de elevación no se produce hasta que un elemento (8) de fijación ha sido aplicado a una profundidad predeterminada por el émbolo (12). 26. Método según la reivindicación 21, en el que la superficie (92) de retroceso está separada de la superficie (90) de elevación por una distancia predeterminada (D) durante la etapa de empujar, comprendiendo además la etapa de ajustar la distancia predeterminada (D). 27. Método según la reivindicación 15, en el que ES 2 366 213 T3 la herramienta (2) de aplicación de elementos de fijación comprende además una superficie (94a; 94b) de separación asociada funcionalmente al cuerpo (20a; 20b) de herramienta y una superficie (96a; 96b) de tope asociada funcionalmente a la sonda (14) de control de profundidad, y en el que la etapa de empujar incluye empujar la superficie (96a; 96b) de tope hacia la superficie (94a; 94b) de separación. 13 ES 2 366 213 T3 14 ES 2 366 213 T3 ES 2 366 213 T3 16 ES 2 366 213 T3 17 ES 2 366 213 T3 18 ES 2 366 213 T3 19
Patentes similares o relacionadas:
Aparato de inserción pirotécnica, del 1 de Febrero de 2017, de HILTI AKTIENGESELLSCHAFT: Aparato de inserción, que comprende
una carcasa guiada con la mano con un miembro de pistón dispuesto en ella para la transmisión de […]
Dispositivo de inserción pirotécnica, del 1 de Febrero de 2017, de HILTI AKTIENGESELLSCHAFT: Un aparato de inserción, que comprende:
una carcasa guiada manualmente,
un miembro de pistón alojado en una guía de pistón […]
Aparato de accionamiento, del 26 de Octubre de 2016, de HILTI AKTIENGESELLSCHAFT: Aparato de accionamiento, que comprende una carcasa guiada con la mano con un miembro de pistón alojado en ella para la transmisión […]
Dispositivo de fijación por impacto, del 20 de Mayo de 2015, de HILTI AKTIENGESELLSCHAFT: Dispositivo para fijar por impacto un elemento de fijación en una base, que presenta un elemento de transmisión de energía que puede moverse entre una […]
APARATO DE AJUSTE DE FIJACION, del 24 de Noviembre de 2009, de HILTI AKTIENGESELLSCHAFT: Aparato de ajuste de fijación para clavar elementos de fijación en un sustrato, con una guía de pistón , que presenta una cavidad , en la que está […]
APARATO DE COLOCACION DE PERNOS PARA ENCUÑAR PERNOS O SIMILARES EN PIEZAS CONSTRUCTIVAS, del 16 de Junio de 2007, de HILTI AKTIENGESELLSCHAFT: Aparato de colocación de pernos para encuñar pernos o similares en piezas constructivas con una guía de pernos y un émbolo de impulsión […]
EMPUJADOR DE BULONES Y UN MUELLE RECUPERADOR PARA ESTE APARATO., del 16 de Marzo de 2005, de ADOLF WURTH GMBH & CO. KG: UN FIJADOR DE PERNOS PARA LA COLOCACION DE PERNOS DE SUJECION MEDIANTE UN EMBOLO DE EMPUJE ACCIONADO POR UNA CARGA DE PROPULSION, CONTIENE UN MUELLE RECUPERADOR QUE RODEA […]
FIJADOR DE PERNOS POR IMPACTO., del 16 de Octubre de 2004, de ADOLF WURTH GMBH & CO. KG: UN APARATO DE EMPUJE DE PERNO CONTIENE UN TUBO INTERIOR, EN EL QUE SE DISPONE UN EMBOLO DE IMPULSION HACIA UN LADO Y OTRO. EL TUBO INTERIOR SE APLICA […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Aparato de accionamiento, del 26 de Octubre de 2016, de HILTI AKTIENGESELLSCHAFT: Aparato de accionamiento, que comprende una carcasa guiada con la mano con un miembro de pistón alojado en ella para la transmisión […]
Aparato de accionamiento, del 26 de Octubre de 2016, de HILTI AKTIENGESELLSCHAFT: Aparato de accionamiento, que comprende una carcasa guiada con la mano con un miembro de pistón alojado en ella para la transmisión […]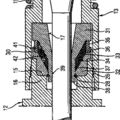 APARATO DE AJUSTE DE FIJACION, del 24 de Noviembre de 2009, de HILTI AKTIENGESELLSCHAFT: Aparato de ajuste de fijación para clavar elementos de fijación en un sustrato, con una guía de pistón , que presenta una cavidad , en la que está […]
APARATO DE AJUSTE DE FIJACION, del 24 de Noviembre de 2009, de HILTI AKTIENGESELLSCHAFT: Aparato de ajuste de fijación para clavar elementos de fijación en un sustrato, con una guía de pistón , que presenta una cavidad , en la que está […]