Grúa con control de grúa.
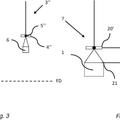
Grúa con una pluma (1), un control de grúa y al menos un cable (20) para elevar una carga (10),
estando prevista en el control de grúa al menos una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad, en la que la al menos una unidad de sensor está dispuesta en un elemento de seguimiento de cable (35) y se guía en el cable (20), caracterizada porque la al menos una unidad de sensor dispuesta en el elemento de seguimiento de cable (35) está conectada con éste a través de una conexión cardán (32) con la pluma (1) de la grúa.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08008276.
Solicitante: LIEBHERR-WERK NENZING GMBH.
Nacionalidad solicitante: Austria.
Dirección: DR.-HANS-LIEBHERR-STRASSE 1 6710 NENZING AUSTRIA.
Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, NEUPERT,JORG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para limitar o impedir el balanceo longitudinal o transversal de las cargas.
- B66C13/08 B66C 13/00 […] › para depositar las cargas según una orientación o en una posición dadas.
- B66C13/46 B66C 13/00 […] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
PDF original: ES-2531374_T3.pdf
Fragmento de la descripción:
Grúa con control de grúa
La presente invención se refiere a una grúa según el preámbulo de la reivindicación 1. Una grúa de este tipo se da a conocer, por ejemplo, por el documento FR 2445291. En particular, en el caso de la grúa se trata de una grúa de pluma que tiene una pluma que se puede hacer pivotar con respecto a un eje horizontal que está articulada en una torre que puede girar alrededor de un eje vertical. Para ello están previstos como mecanismos de regulación un mecanismo basculante y un mecanismo de giro. El cable para elevar la carga discurre a este respecto por la punta de la pluma, en particular por una o varias poleas de desviación dispuestas en la misma, de modo que la carga se puede mover en la dirección tangencial mediante un giro de la torre y en la dirección radial mediante una basculación de la pluma. En la realización de la invención con al menos un primer ramal de cable y un segundo ramal de cable, ambos ramales de cable discurren desde la punta de la pluma hacia un elemento de recepción como, por ejemplo, un gancho. La longitud del cable se puede ajustar a este respecto mediante un accionamiento correspondiente para mover la carga en la dirección vertical. En particular, el control de grúa según la invención se refiere a este respecto en general a grúas giratorias así como a grúas móviles para puertos, grúas de barco, grúas offshore, grúas de automóvil y grúas sobre orugas.
Por los documentos DE 100 64 182 y DE 103 24 692, cuyo contenido total constituye una parte de la presente invención, son conocidos a este respecto controles de grúa cuyos conceptos de control y automatización evitan el movimiento pendular de la carga en el cable en caso de un movimiento de la grúa.
Por los documentos DE 100 29 579 y DE 10 2006 033 277, cuyo contenido también constituye una parte de la presente solicitud, son conocidos además controles de grúa que evitan una oscilación giratoria de la carga en el cable.
En los controles de grúa anteriormente mencionados se emplean a este respecto para la determinación de la oscilación de carga unidades de giroscopio que están dispuestas en el gancho de grúa y que determinan la velocidad angular del cable. El ángulo de cable se determina a este respecto mediante un circuito observador que integra el movimiento del cable. Para poder compensar el desplazamiento que se produce a este respecto se parte de un péndulo que oscila libremente cuya posición de descanso corresponde a un ángulo de cable perpendicular. Un procedimiento de este tipo es muy adecuado para la amortiguación pendular de cable, ya que para ello se tienen que vigilar sobre todo los movimientos del cable en caso de una oscilación libre de la carga en el cable. Sin embargo, una determinación de la orientación absoluta del cable, en particular antes de que la carga pueda oscilar libremente, ni está prevista ni es posible con los controles de grúa conocidos. Además, disposiciones de sensor y controles de grúa conocidos tenían el inconveniente de que no se tenían en cuenta influencias perturbadoras como el giro del campo de cable en la amortiguación de oscilaciones de carga para amortiguar las oscilaciones pendulares esféricas de la carga.
Sin embargo, sistemas conocidos tal como se utilizan, por ejemplo, en grúas con un carro de grúa que se puede mover sólo en la dirección horizontal, y que emplean sistemas de cámara de medición para determinar el ángulo de cable absoluto, no se pueden emplear en particular en grúas de pluma. Sistemas de cámara de medición siempre tienen que estar dispuestos directamente detrás del punto fijo de cable para poder determinar el ángulo de cable. Sin embargo, en grúas de pluma en las que el cable está guiado de manera móvil a través de una polea dispuesta en el cabezal de pluma no existe un punto fijo de cable, ya que también cambia el punto de salida de cable con el ángulo de cable. Sensores de valores medidos que determinan mecánicamente el ángulo de cable con respecto a la pluma tampoco son adecuados para medir el ángulo de cable absoluto, ya que, en primer lugar, éstos funcionan de manera imprecisa y, además, llevan a resultados incorrectos en caso de una deformación de la grúa. Además, todos estos sistemas determinan siempre sólo el ángulo de cable con respecto a la pluma, y, con ello, sólo serían adecuados de forma indirecta para determinar el ángulo de cable absoluto, de modo que hasta ahora se ha prescindido completamente de soluciones de este tipo.
Por tanto, el maquinista de grúa debe seguir orientando la grúa manualmente y a la vista antes de la elevación o al inicio de la elevación de modo que el cable queda orientado fundamentalmente de manera perpendicular. Sin embargo, precisamente en el caso de la gran distancia con respecto a la carga, esto es posible a menudo sólo con dificultades extremas, de modo que resultan desviaciones del ángulo de cable con respecto a la perpendicular que en caso de una elevación de la carga llevan a oscilaciones no deseadas. La misma problemática resulta cuando el cable está orientado de manera perpendicular antes de la elevación debido a un desequilibrio de la carga pero se cambia el ángulo de cable en la elevación de la carga debido al movimiento del centro de gravedad de la carga por debajo del punto de absorción de carga. Asimismo, el hecho de que la estructura de grúa ceda bajo la carga en la elevación de la carga puede cambiar de manera no deseada el ángulo de cable. En grúas offshore se produce adicionalmente el problema de que se puede cambiar el ángulo de cable debido a un movimiento relativo de un barco que soporta la carga con respecto a la grúa offshore.
El objetivo de la presente Invención es por tanto proporcionar un control de grúa mediante el que sea posible una orientación más sencilla y segura de la grúa en particular antes y durante la elevación de la carga. Además, el objetivo de la presente Invención es posibilitar una amortiguación mejorada de las oscilaciones pendulares esféricas de la carga.
Según la invención, este objetivo se consigue mediante un control de grúa según la reivindicación 1. Éste tiene según la invención una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad. Mediante esta unidad de sensor se puede determinar directamente el ángulo de cable con respecto a la dirección de la fuerza de gravedad de modo que se simplifica considerablemente la orientación perpendicular del cable. De este modo se aumenta además la seguridad en la elevación.
La unidad de sensor tiene a este respecto habitualmente un elemento que se orienta bajo la influencia de la fuerza de gravedad y mediante el que se puede determinar el ángulo del cable con respecto a la dirección de la fuerza de gravedad. En particular se puede emplear a este respecto cualquier tipo de nivel de burbuja eléctrico. En la realización más sencilla, la unidad de sensor puede determinar a este respecto sólo si el cable está orientado de manera perpendicular o no. En realizaciones más complicadas se puede determinar además la dirección de la desviación con respecto a la perpendicular y en realizaciones adicionales se puede determinar el valor de la desviación con respecto a la perpendicular.
Según la invención se determina mediante la unidad de sensor el ángulo de cable en al menos una dirección con respecto a la dirección de gravedad, por ejemplo, en la dirección radial o en la dirección tangencial poder para determinar y, dado el caso, compensar una desviación del ángulo de cable con respecto a la perpendicular en esta dirección. De manera ventajosa, el ángulo de cable se determina a este respecto tanto en la dirección tangencial como en la dirección radial, ya que sólo así es posible una orientación realmente perpendicular del cable. Para ello, la unidad de sensor tiene de manera ventajosa al menos dos sensores que sirven respectivamente para la determinación del ángulo de cable radial o del ángulo de cable tangencial con respecto a la dirección de la fuerza de gravedad.
Mediante una unidad de sensor de este tipo se vuelve posible una orientación precisa de la grúa en la elevación de la carga, de modo que el cable queda orientado de manera perpendicular. También se puede emplear la unidad de sensor para funciones de vigilancia y aseguramiento.
Además, de manera ventajosa está prevista además de la unidad de sensor para la determinación de un ángulo de cable con respecto a la dirección de la fuerza de gravedad al menos una unidad de giroscopio para la medición de una velocidad de ángulo de cable. En particular, esta unidad de giroscopio se puede emplear además para la amortiguación de oscilaciones en caso de una carga que oscila libremente, para... [Seguir leyendo]
Reivindicaciones:
1. Grúa con una pluma (1), un control de grúa y al menos un cable (20) para elevar una carga (10), estando prevista en el control de grúa al menos una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad, en la que la al menos una unidad de sensor está dispuesta en un elemento de seguimiento de cable (35) y se guía en el cable (20), caracterizada porque la al menos una unidad de sensor dispuesta en el elemento de seguimiento de cable (35) está conectada con éste a través de una conexión cardán (32) con la pluma (1) de la grúa.
2. Grúa según la reivindicación 1, estando prevista, además de la unidad de sensor para determinar un ángulo de cable (70) con respecto a la dirección de la fuerza de gravedad, al menos una unidad de giroscopio para medir una velocidad de ángulo de cable.
3. Grúa según la reivindicación 1 o 2, teniendo la grúa al menos dos ramales de cable para elevar la carga (10) y al menos dos unidades de sensor para determinar los ángulos de cable con respecto a la dirección de la fuerza de gravedad que están asignadas a diferentes ramales de cable.
4. Grúa según una de las reivindicaciones anteriores, teniendo la grúa al menos dos ramales de cable para elevar la carga (10), y estando previstas al menos dos unidades de giroscopio para medir las velocidades de ángulo de cable que están asignadas a diferentes ramales de cable.
5. Grúa según la reivindicación 4, estando las unidades de giroscopio dispuestas en el elemento de seguimiento de cable.
6. Grúa según la reivindicación 5, teniendo la grúa al menos dos ramales de cable para elevar la carga (10), y estando previstos al menos dos elementos de seguimiento de cable que están asignados a diferentes ramales de cable.
7. Grúa según una de las reivindicaciones anteriores, estando prevista una unidad de indicación para indicar una desviación que resulta del ángulo de cable medido, en particular para Indicar un ángulo de cable con respecto a la dirección de la fuerza de gravedad y/o una desviación horizontal que resulta de ello de la carga (10).
8. Grúa según la reivindicación 7, Indicando la Indicación de manera óptica y/o acústica una posición de cable perpendicular.
9. Grúa según una de las reivindicaciones anteriores, estando previsto un dispositivo de aviso que avisa al maquinista de grúa en caso de superar un intervalo de valores admisible (70) para una desviación que resulta del ángulo de cable medido, en particular para el ángulo de cable con respecto a la dirección de la fuerza de gravedad y/o para la desviación horizontal de la carga (10), en particular mediante una señal óptica y/o acústica.
10. Grúa según una de las reivindicaciones anteriores, estando previsto un dispositivo de protección, en particular un mecanismo de protección frente a sobrecargas, que en caso de superar un intervalo de valores admisible (70) para una desviación que resulta del ángulo de cable medido, en particular para el ángulo de cable con respecto a la dirección de la fuerza de gravedad y/o para la desviación horizontal de la carga (10), interviene automáticamente en el control de la grúa, en particular para evitar una sobrecarga de la grúa.
11. Grúa según la reivindicación 10, deteniendo el mecanismo de protección frente a sobrecargas el movimiento de la grúa.
12. Grúa según la reivindicación 10, liberando el mecanismo de protección frente a sobrecargas al menos parcialmente el movimiento de la grúa y/o del cable (20), en particular en el caso de grúas offshore.
13. Grúa según una de las reivindicaciones anteriores, evaluando el control de grúa, en particular el dispositivo de aviso y/o el mecanismo de protección frente a sobrecargas, adlclonalmente datos de un sensor de fuerza de cable.
14. Grúa según una de las reivindicaciones anteriores, teniendo la grúa al menos dos ramales de cable para elevar la carga (10), cuyo giro de campo de cable se determina.
15. Grúa según la reivindicación 14, estando prevista una unidad de indicación para Indicar el giro de campo de cable.
16. Grúa según la reivindicación 14, estando previsto un dispositivo de aviso que avisa al maquinista de grúa en caso de superar un Intervalo de valores admisible para el giro de campo de cable, en particular mediante una señal
óptica y/o acústica.
17. Grúa según una de las reivindicaciones anteriores, estando previsto un mecanismo de aseguramiento frente a un giro que en caso de superar un intervalo de valores admisible para el giro de campo de cable interviene automáticamente en el control de la grúa.
18. Grúa según una de las reivindicaciones anteriores que tiene una amortiguación automática de oscilaciones de carga.
19. Grúa según la reivindicación 18, basándose la amortiguación de oscilaciones de carga en los datos de al menos una unidad de giroscopio.
20. Grúa según la reivindicación 19, utilizándose la unidad de sensor para determinar el ángulo de cable con respecto a la dirección de la fuerza de gravedad para vigilar y/o calibrar la unidad de giroscopio.
21. Grúa según una de las reivindicaciones anteriores, estando prevista una función para la orientación automática de la grúa mediante la que se orienta el cable (20) de manera perpendicular por encima de la carga (10).
22. Grúa según una de las reivindicaciones anteriores, estando prevista una función para la orientación automática de la grúa mediante la que se compensa un giro de campo de cable.
23. Grúa según una de las reivindicaciones anteriores con una memoria para almacenar datos de carga basándose en el ángulo de cable para calcular la vida útil y/o para la documentación.
24. Grúa según una de las reivindicaciones anteriores, evaluándose los datos medidos por la primera y la segunda unidad de sensor por un primer y un segundo circuito observador.
25. Grúa según una de las reivindicaciones anteriores, realizándose una compensación de los datos medidos por la primera y la segunda unidad de sensor con respecto al ángulo de instalación de las unidades de sensor y con respecto al ángulo de giro de la grúa.
26. Grúa según una de las reivindicaciones anteriores, detectándose errores de sensor mediante una comparación de los datos medidos por la primera y la segunda unidad de sensor.
27. Grúa según una de las reivindicaciones anteriores, teniéndose en cuenta en la amortiguación de oscilaciones de carga la oscilación de torsión del campo de cable mediante una formación de promedio a partir de los ángulos de cable y/o las velocidades de ángulo de cable determinados por la primera y segunda unidad de sensor.
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Flujo de video modificado para soportar el control remoto de una grúa de contenedores, del 18 de Diciembre de 2019, de ABB SCHWEIZ AG: Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Grúa de torre y procedimiento para el montaje de una pala de rotor de turbina eólica, del 22 de Mayo de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa de torre con un torre compuesta de al menos un elemento de torre, en particular una pieza de rejilla, y preferentemente con un elemento de arriostramiento […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Agarradera para aparato de manipulación de carga y grúa, del 14 de Marzo de 2019, de KONECRANES GLOBAL CORPORATION: Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, […]