Filtrado adaptativo basado en la intensidad del límite.
Codificador para codificar una imagen (12), que comprende:
un medio (56) para filtrar selectivamente,
por lo menos, una parte de una zona próxima a un límite entre dos zonas adyacentes (44, 46) en la imagen, en el que está dispuesto un medio de control (54) para controlar dicho medio de filtrado, de tal modo que para dos zonas adyacentes en lados opuestos de dicho límite, el filtrado selectivo depende de las situaciones siguientes:
i) cuando por lo menos una de dichas zonas está intra-codificada,
ii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero, y se estima que las imágenes de referencia (42, 48: R (j), R (k) ) utilizadas para la predicción de movimiento para las zonas respectivas son diferentes, o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son mayores o iguales que un umbral, y
iii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero y se estima que dichas imágenes de referencia (42, 48; R (j), R (k) ) son iguales, y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son menores que dicho umbral, en el que el medio de control (54) está adaptado para fijar un valor para una intensidad del límite (Bs) para el límite entre dichas dos zonas adyacentes y para incrementar la intensidad del filtrado selectivo cuando se incrementa la intensidad del límite (Bs), en el que la intensidad del límite (Bs) se fija de tal modo que:
en la situación i), la intensidad del límite se fija a un primer valor (202);
en la situación ii), la intensidad del límite se fija a un segundo valor (210), menor que el primer valor; y
en la situación iii), la intensidad del límite se fija a un tercer valor (212), menor que el segundo valor (210),
caracterizado porque en la situación i), la intensidad del límite (Bs) se fija al mismo primer valor (202);
cuando una y cuando las dos zonas adyacentes están intra-codificadas, y en el que la intensidad del límite (Bs) es independiente del parámetro de cuantificación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05008079.
Solicitante: SHARP KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 22-22, NAGAIKE-CHO ABENO-KU OSAKA-SHI, OSAKA 545-8522 JAPON.
Inventor/es: KATATA, HIROYUKI, SUN,SHIJUN, Lei,Shawmin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H03M7/30 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03M CODIFICACION, DECODIFICACION O CONVERSION DE CODIGO, EN GENERAL (por medio de fluidos F15C 4/00; convertidores ópticos analógico/digitales G02F 7/00; codificación, decodificación o conversión de código especialmente adaptada a aplicaciones particulares, ver las subclases apropiadas, p. ej. G01D, G01R, G06F, G06T, G09G, G10L, G11B, G11C, H04B, H04L, H04M, H04N; cifrado o descifrado para la criptografía o para otros fines que implican la necesidad de secreto G09C). › H03M 7/00 Conversión de un código, en el cual la información está representada por una secuencia dada o por un número de dígitos, en un código en el cual la misma información está representada por una secuencia o por un número de dígitos diferentes. › Compresión (análisis-síntesis de la voz para reducción de redundancia G10L 19/00; para transmisión de imágenes H04N ); Expansión; Supresión de datos innecesarios, p. ej. reducción de redundancia.
- H03M7/36 H03M 7/00 […] › Conversión en, o a partir de una modulación diferencial de varios bits, es decir, la diferencia entre muestras sucesivas está codificada por más de un bit.
- H04N11/04 H […] › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 11/00 Sistemas de televisión en color (detalles H04N 9/00). › que utilizan la modulación por impulsos codificados.
- H04N7/26
- H04N7/30
- H04N7/32
- H04N7/36
- H04N7/50
PDF original: ES-2383603_T3.pdf
Fragmento de la descripción:
Filtrado adaptativo basado en la intensidad del límite
ANTECEDENTES DE LA INVENCIÓN
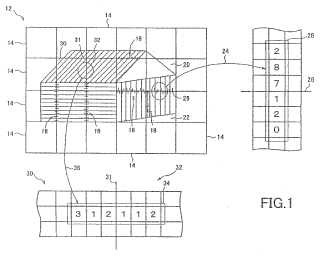
La codificación de video con compensación de movimiento basada en bloques se utiliza en muchos estándares de compresión de video, tales como por ejemplo H.261, H.263, H.263+, MPEG-1, MPEG-2 y H26L. La compensación de movimiento basada en bloques codifica píxeles de un modo bloque a bloque utilizando técnicas de compresión de imagen. Normalmente, las técnicas de compresión de imagen utilizan técnicas de compresión con pérdida, que dan lugar a artefactos visuales en las imágenes descodificadas, denominados generalmente artefactos de imagen. Un tipo de artefactos de imagen son los artefactos de bloque, que se producen a lo largo de los límites de bloques en una imagen reconstruida. El origen principal de los artefactos de bloque está en la cuantificación gruesa de coeficientes de transformada utilizados para codificar los bloques.
Las imágenes reconstruidas son las imágenes producidas después de que los bloques son sometidos a transformada inversa y descodificados. Pueden utilizarse técnicas de filtrado de imagen para reducir los artefactos en las imágenes reconstruidas. La norma general para estas técnicas de filtrado de imagen es que los bordes de la imagen deben mantenerse mientras que el resto de la imagen debe suavizarse. Como filtro de imagen puede utilizarse un filtro de paso bajo, y sus características deberán seleccionarse en base a las características de un píxel o conjunto de píxeles concreto, en torno a los bordes de la imagen.
Los píxeles de imagen no correlacionados que se extienden a través de los límites del bloque de imagen son filtrados específicamente para reducir los artefactos de bloque. Aunque las técnicas de filtrado reducen los artefactos de bloque, sin embargo desgraciadamente estas técnicas de filtrado pueden introducir artefactos de pérdida de definición en la imagen. Por ejemplo, si entre bloques adyacentes existen pocos o ningún artefacto de bloque, entonces el filtrado de paso bajo incorpora innecesariamente pérdida de definición en la imagen, desaprovechando al mismo tiempo recursos de procesamiento.
El aparato JP 2001-204029 da a conocer un método y un aparato de detección de ruido y un aparato de descodificación de imágenes, en los que se detectan artefactos de bloque. El ruido de codificación se detecta en función de distribuciones de componentes de frecuencia de coeficientes de transformación ortogonales de bloques que solapan.
El documento "Loop Filter with Skip Mode" ("filtro de bucle con modo omisión (VCEG-M20) ") , de Shijun Sun et al., ITU TELECOMMUNICATIONS STANDARDIZATION SECTOR STUDY GROUP 16, VCEG-M20, 27 de marzo de 2001, páginas 1 a 8, XP002321426 Austin, Texas, EE.UU., describe un esquema para omitir el filtrado de atenuación de bloques en los límites entre bloques inter-codificados que comparten el mismo vector de movimiento con respecto al mismo fotograma de imagen de referencia y sin diferencias significativas entre los residuos de la imagen.
El documento de Peter List, "Report of the Ad Hoc committee on loop filter improvement (VCEG-NO8) " ("informe del comité ad hoc sobre mejoras del filtro de bucle (VCEG-NO8) ") , ITU Telecommunications Standardization Sector Study Group 16, VCEG-NO8, páginas 1 a 3, XP00234774, describe una técnica para configurar intensidades de filtrado para cada bloque de luminancia 4 x 4 y decidir si ha de llevarse a cabo filtrado o no, en base a los valores de intensidad de filtrado de bloques de luminancia a ambos lados de un límite, o a diferencias absolutas entre componentes de vectores de movimiento o a diferencias en las imágenes de referencia.
El documento "H.26L Test Model long term number 8.4 (TML-8.4) Software, module: loop-filter.c" ("soporte lógico del modelo de prueba a largo plazo H.26L 8.4, módulo: loop-filter.c") , de Peter List et al., ITU Telecommunications Standardization Sector Study Group 16, VCEG, páginas 1 a 3, XP002440062, da a conocer parámetros de configuración "strength Q", "strength P", "VecDif" y "strong", entre los cuales "strength Q" y "strength P" se establecen para bloques, y "VecDif" y "strong" se establecen para un límite, con objeto de controlar la intensidad de filtrado de un límite de bloque.
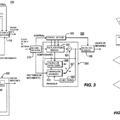
De acuerdo con un aspecto de la presente invención, se da a conocer un codificador para codificar una imagen, que comprende: un medio para filtrar selectivamente, por lo menos, una parte de una zona próxima a un límite entre dos zonas adyacentes en la imagen, en el que está dispuesto un medio de control 54 para controlar dicho medio de filtrado de tal modo que, para dos zonas adyacentes en lados opuestos de dicho límite, el filtrado selectivo depende de las siguientes situaciones:
i) cuando por lo menos una de dichas zonas está intra-codificada, ii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero, y se estima que las imágenes de referencia (42, 48: R (j) , R (k) )
utilizadas para la predicción de movimiento para las zonas respectivas son diferentes, o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son mayores o iguales que un umbral, y iii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero y se estima que dichas imágenes de referencia (42, 48; R (j) , R (k) ) son iguales, y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son menores que dicho umbral, en el que el medio de control 54 está adaptado para fijar un valor para una intensidad del límite (Bs) para el límite entre dichas dos zonas adyacentes y para incrementar la intensidad del filtrado selectivo cuando se incrementa la intensidad del límite (Bs) , en el que la intensidad del límite (Bs) se fija de tal modo que:
en la situación i) , la intensidad del límite se fija a un primer valor (202) ;
en la situación ii) , la intensidad del límite se fija a un segundo valor (210) , menor que el primer valor; y en la situación iii) , la intensidad del límite se fija a un tercer valor (212) , menor que el segundo valor (210) , en el que en la situación i) , la intensidad del límite (Bs) se fija al mismo primer valor (202) ;
cuando una y cuando las dos zonas adyacentes están intra-codificadas, y en el que la intensidad del límite (Bs) es independiente del parámetro de cuantificación.
De acuerdo con un aspecto de la presente invención, se da a conocer un descodificador para descodificar una imagen, que comprende: un medio para filtrar selectivamente, por lo menos, una parte de una zona próxima a un límite entre dos zonas adyacentes en la imagen, en el que está dispuesto un medio de control para controlar dicho medio de filtrado de tal modo que, para dos zonas adyacentes en lados opuestos de dicho límite, el filtrado selectivo depende de las siguientes situaciones:
i) cuando por lo menos una de dichas zonas está intra-codificada, ii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero, y se estima que las imágenes de referencia utilizadas para la predicción de movimiento para las zonas respectivas son diferentes, o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son mayores o iguales que un umbral, y iii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero y se estima que dichas imágenes de referencia son iguales, y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son menores que dicho umbral, en el que el medio de control está adaptado para fijar un valor para una intensidad... [Seguir leyendo]
Reivindicaciones:
1. Codificador para codificar una imagen (12) , que comprende:
un medio (56) para filtrar selectivamente, por lo menos, una parte de una zona próxima a un límite entre dos zonas adyacentes (44, 46) en la imagen, en el que está dispuesto un medio de control (54) para controlar dicho medio de filtrado, de tal modo que para dos zonas adyacentes en lados opuestos de dicho límite, el filtrado selectivo depende de las situaciones siguientes:
i) cuando por lo menos una de dichas zonas está intra-codificada, ii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero, y se estima que las imágenes de referencia (42, 48: R (j) , R (k) ) utilizadas para la predicción de movimiento para las zonas respectivas son diferentes, o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son mayores o iguales que un umbral, y iii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero y se estima que dichas imágenes de referencia (42, 48; R (j) , R (k) ) son iguales, y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son menores que dicho umbral, en el que el medio de control (54) está adaptado para fijar un valor para una intensidad del límite (Bs) para el límite entre dichas dos zonas adyacentes y para incrementar la intensidad del filtrado selectivo cuando se incrementa la intensidad del límite (Bs) , en el que la intensidad del límite (Bs) se fija de tal modo que:
en la situación i) , la intensidad del límite se fija a un primer valor (202) ;
en la situación ii) , la intensidad del límite se fija a un segundo valor (210) , menor que el primer valor; y en la situación iii) , la intensidad del límite se fija a un tercer valor (212) , menor que el segundo valor (210) , caracterizado porque en la situación i) , la intensidad del límite (Bs) se fija al mismo primer valor (202) ;
cuando una y cuando las dos zonas adyacentes están intra-codificadas, y en el que la intensidad del límite (Bs) es independiente del parámetro de cuantificación.
2. Descodificador para descodificar una imagen, que comprende:
un medio (56) para filtrar selectivamente, por lo menos, una parte de una zona próxima a un límite entre dos zonas adyacentes (44, 46) en la imagen, en el que está dispuesto un medio de control (54) para controlar dicho medio de filtrado, de tal modo que para dos zonas adyacentes en lados opuestos de dicho límite, el filtrado selectivo depende de las situaciones siguientes:
i) cuando por lo menos una de dichas zonas está intra-codificada, ii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero, y se estima que las imágenes de referencia (42, 48: R (j) , R (k) ) utilizadas para la predicción de movimiento para las zonas respectivas son diferentes, o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical o la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son mayores o iguales que un umbral, y iii) cuando las dos zonas adyacentes en lados opuestos de dicho límite están sometidas a predicción de movimiento sin coeficientes de transformada distintos de cero y se estima que dichas imágenes de referencia (42, 48; R (j) , R (k) ) son iguales, y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección vertical y la diferencia absoluta de dichos vectores de movimiento para las zonas adyacentes respectivas en una dirección horizontal son menores que dicho umbral, en el que el medio de control (54) está adaptado para fijar un valor para una intensidad del límite (Bs) para el límite entre dichas dos zonas adyacentes y para incrementar la intensidad del filtrado selectivo cuando se incrementa la intensidad del límite (Bs) , en el que la intensidad del límite (Bs) se fija de tal modo que: en la situación i) , la intensidad del límite se fija a un primer valor (202) ; en la situación ii) , la intensidad del límite (Bs) se fija a un segundo valor (210) , menor que el primer valor; y en la situación iii) , la intensidad del límite (Bs) se fija a un tercer valor (212) , menor que el segundo valor (210) , caracterizado porque en la situación i) , la intensidad del límite (Bs) se fija al mismo primer valor (202) ; cuando una y cuando las dos zonas adyacentes están intra-codificadas, y en el que la intensidad del límite (Bs) es independiente del parámetro de cuantificación.
Patentes similares o relacionadas:
Sistema y método para codificación y decodificación aritmética, del 29 de Abril de 2020, de NTT DOCOMO, INC.: Método de decodificación aritmética para convertir una secuencia de información compuesta por una secuencia de bits en una secuencia de eventos binarios compuesta […]
 Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Método para codificar y descodificar imágenes B en modo directo, del 19 de Febrero de 2020, de Godo Kaisha IP Bridge 1: Un método para generar y descodificar una secuencia de bits de una imagen B objetivo, en donde generar la secuencia de bits de la imagen B objetivo incluye las siguientes […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método para compresión de imágenes de video usando predicción en modo directo, que incluye: proporcionar una secuencia de cuadros predichos […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método de compresión de imágenes de video que comprende: proporcionar una secuencia de cuadros referenciables (I, P) y predichos bidireccionales […]
Capa de sectores en códec de vídeo, del 27 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un procedimiento de decodificación de vídeo e imágenes, que comprende: decodificar una imagen de un flujo de bits codificado que tiene una jerarquía […]
Transformación solapada condicional, del 20 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un método para codificar un flujo de bits de vídeo utilizando una transformación solapada condicional, en donde el método comprende: la señalización de un modo de filtro […]
Técnica para una simulación del grano de película exacta de bits, del 4 de Septiembre de 2019, de InterDigital VC Holdings, Inc: Un procedimiento para simular un grano de película en un bloque de imagen que comprende: calcular el promedio de los valores de luminancia de píxeles dentro del bloque de […]