ESTIMACION DOPPLER.
estimar un valor con sesgo corregido según la relación
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2004/052815.
Solicitante: TELEFONAKTIEBOLAGET LM ERICSSON (PUBL).
Nacionalidad solicitante: Suecia.
Dirección: PATENT UNIT,164 83 STOCKHOLM.
Inventor/es: SAHLIN,HENRIK.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Junio de 2010.
Clasificación Internacional de Patentes:
- G01S11/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan medidas de intensidad.
- H04B7/01 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 7/00 Sistemas de radiotransmisión, es decir, utilizando un campo de radiación (H04B 10/00, H04B 15/00 tienen prioridad). › Reducción del desplazamiento de fase.
Clasificación PCT:
Fragmento de la descripción:
Estimación Doppler.
Campo de la invención
La presente invención se refiere a una estimación Doppler en sistemas de telecomunicaciones y en el campo de la instrumentación y las mediciones.
Antecedentes de la invención
Ensanchamiento y desviación Doppler
Cuando un transmisor se mueve en relación a un receptor, la señal recibida experimentará el bien conocido efecto Doppler, es decir, la amplitud de la señal recibida cambiará en proporción a la velocidad a la que se mueven el receptor y el transmisor, uno con relación al otro.
En entornos en los que no puede obtenerse una comunicación con línea de visión directa, se encuentra, típicamente, un desvanecimiento multi-trayecto conforme las señales de radio son dispersadas y reflejadas entre varios objetos en el trayecto desde la antena transmisora a la antena receptora de un sistema de comunicaciones.
Los entornos con desvanecimiento multi-trayecto pueden ser modelados mediante un canal que tiene un espectro como el mostrado en la Fig. 3, en la que el espectro está centrado alrededor de una desviación de frecuencia f0 de la señal recibida de la señal transmitida y con una anchura del espectro que es el ensanchamiento Doppler, 2 f0.
Esta desviación de frecuencia f0 es debida a errores en la frecuencia de modulación entre el transmisor y el receptor. Este error podría depender también del ensanchamiento Doppler si el receptor y el transmisor tienen un canal de propagación con línea de visión directa. Puede usarse un algoritmo de estimación de frecuencia para estimar esta desviación, de manera que la desviación podría ser eliminada, o compensada, en la señal recibida.
El ensanchamiento Doppler es debido a componentes difusos del canal con variación temporal, que es denominado también desvanecimiento rápido. El ensanchamiento Doppler es linealmente proporcional a la velocidad del receptor y/o el transmisor. Cuando el receptor/transmisor no se mueve, el ensanchamiento Doppler es cero.
Un canal con variación temporal con un espectro como el mostrado en la Figura 3, tiene una función de autocorrelación tal como la mostrada en la Figura 4, que corresponde a la Ecuación (6) proporcionada en la Tabla 1 adjunta.
Aplicaciones conocidas del ensanchamiento Doppler
Para un sistema de comunicaciones por radio que comprende un transmisor y un receptor, los interfaces de antena y los interfaces aéreos pueden considerarse como un canal h(t) con variación temporal, donde t es un índice temporal. Cuando una señal s(t) piloto es transmitida, la señal recibida en el interfaz aéreo de antena puede escribirse como

donde w(t) es ruido aditivo o interferencias desde otros transmisores diferentes al transmisor de interés.
En el receptor, la señal r(t) puede ser demodulada mediante símbolos piloto s*(t) conjugados. A continuación, el canal con variación temporal puede ser estimado según la siguiente relación bien conocida:

La contribución del ruido puede ser modelada frecuentemente como una señal de ruido blanco; es decir, una señal con un espectro plano; un ejemplo en el dominio temporal se muestra en la Fig. 2. A continuación, el canal puede ser estimado más precisamente mediante el uso de un intervalo TACC de acumulación o de integración.
Puede demostrarse que puede definirse un intervalo TACC de integración (o de acumulación) óptimo, el cual depende del ensanchamiento Doppler. De esta manera, para un receptor con un buen rendimiento en términos de bajas tasas de errores de bit y de errores de bloque, la precisión de la estimación del ensanchamiento Doppler es crucial. Un procedimiento correspondiente se muestra en la Fig. 7, en la que se fija un intervalo TACC de integración en el receptor (etapa 1); se recibe una señal de radio (etapa 2); se estima un ensanchamiento Doppler f^D (etapa 3) y se fija un nuevo intervalo de integración en el receptor, en base al ensanchamiento Doppler (etapa 4). Cuanto mayor sea el ensanchamiento Doppler, más corto será el intervalo de integración a usar.
Otra aplicación ejemplar de una estimación Doppler es un medio para predecir la calidad de un enlace de radio. Estimando el ensanchamiento Doppler, puede determinarse la tasa a la que cambia la calidad del enlace de radio.
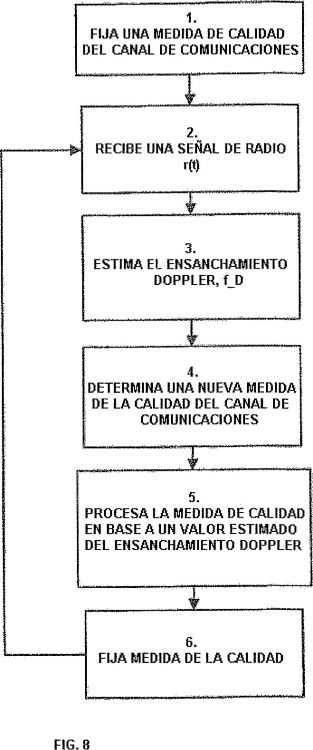
Un procedimiento correspondiente se muestra en la Fig. 8, mediante el cual se fija una medida de la calidad para un canal de comunicaciones (etapa 1); se recibe una señal de radio (etapa 2) y se estima un ensanchamiento Doppler f^D (etapa 3). Se estima una nueva medida de calidad del canal de comunicaciones (etapa 4) que puede realizarse en un orden independiente de la estimación del ensanchamiento Doppler (etapa 3). La estimación del ensanchamiento Doppler podría usarse para procesar adicionalmente esta medida de calidad (etapa 5), por ejemplo, calculando la velocidad de las variaciones en la medida de la calidad. Un ensanchamiento Doppler alto indica que la calidad del canal de comunicaciones cambiará rápidamente, de manera que las nuevas medidas de calidad no son fiables para una predicción. Un ensanchamiento Doppler bajo indica que la calidad del canal de comunicaciones no cambiará rápidamente, de manera que las nuevas medidas de calidad son fiables para una predicción. En base a esta medida de la calidad del canal de comunicaciones, se fija una nueva medida mejorada de la calidad para el sistema de comunicaciones (etapa 6).
Estimación del ensanchamiento Doppler
En el documento WO03/077445 se ha proporcionado un procedimiento para realizar una estimación de ensanchamiento Doppler. Las expresiones correspondientes se han indicado en la ecuación (12a) y (13a) en esta solicitud. Otras expresiones similares para la estimación del ensanchamiento Doppler se han indicado en las ecuaciones (12b) y (13b), que se describen en C. Tepedelenlioglu, A. Abdi, G. Giannakis y M. Kaveh, "Estimation of Doppler spread and signal strength in mobile communications with applications to handoff and adaptive transmission", Wireless communications and Mobile Computing, 2001:1:221-242.
En la Fig. 6, se ha indicado la estimación del ensanchamiento Doppler según se ha realizado en la etapa 3) de la aplicación ejemplar de la Fig. 7 o según se ha realizado en la etapa 3) de la aplicación ejemplar de la Fig. 8. En la Fig. 6, primero, se estiman las autocorrelaciones para al menos dos retrasos de una señal recibida (etapa 10), por ejemplo, usando la ecuación 15 en la Tabla II. Subsiguientemente, se estima el ensanchamiento Doppler "preliminar" (en este caso, final) (etapa 20) partiendo de las autocorrelaciones estimadas anteriores, estimadas según las ecuaciones (12a), (12b), (13a) o (13b). Estos cálculos pueden ser realizados en la unidad de estimación Doppler (DEU) del receptor mostrado en la Fig. 1. En este caso, y=h^(t) en la ecuación (15).
Sin embargo, el inventor de la presente invención ha descubierto que cuando se estima el ensanchamiento Doppler usando el procedimiento anterior, y otros procedimientos comparables, las estimaciones resultantes difieren del valor real, fDTRU, con un error sistemático, un sesgo.
De esta manera, para muchas aplicaciones en las que se requiere una estimación del ensanchamiento Doppler, la precisión de las estimaciones conocidas del ensanchamiento Doppler dejan mucho que desear en términos de precisión.
Sumario de la invención
Es un primer objeto de la invención, exponer un procedimiento para estimar el ensanchamiento Doppler de manera más precisa.
Este objeto se ha conseguido mediante el tema expuesto en la reivindicación 1.
Las ventajas adicionales aparecerán a partir de la descripción detallada siguiente de la invención.
Breve descripción de los dibujos
La Fig. 1 muestra un modelo de la técnica anterior de un transmisor y un receptor, proporcionando el receptor una señal h^(t) demodulada.
La Fig. 2 es una representación esquemática de un ejemplo de una señal h^(t) demodulada.
La Fig. 3 es un espectro de Jake ejemplar debido a la desviación de frecuencia Doppler y al ensanchamiento Doppler,
La Fig. 4 muestra la función de autocorrelación del ensanchamiento Doppler según la ecuación (6) de la técnica anterior,
Reivindicaciones:
1. Procedimiento de estimación del ensanchamiento Doppler, para su uso en un sistema electrónico que comprende las etapas de
estimar un valor con sesgo corregido según la relación

en la que  es un ensanchamiento Doppler máximo preliminar, al cuadrado, basado en los parámetros medidos, y
es un ensanchamiento Doppler máximo preliminar, al cuadrado, basado en los parámetros medidos, y
en la que K2 se determina según

donde k es un entero, y donde
la estimación preliminar de la frecuencia de ensanchamiento Doppler máximo se basa en los valores de autocorrelación (ry(r)) de las señales recibidas, durante al menos dos retrasos (0, 1).
2. Procedimiento según la reivindicación 1, en el que el ensanchamiento Doppler máximo preliminar al cuadrado es estimado calculando una diferencia entre una autocorrelación a retraso cero y una autocorrelación calculada para un retraso de T segundos, siendo normalizada la diferencia mediante una división con la autocorrelación a retraso cero y siendo escalado el resultado con pi al cuadrado y el retraso T en segundos al cuadrado.
3. Procedimiento según las reivindicaciones 1 ó 2, en el que el ensanchamiento Doppler máximo preliminar al cuadrado es estimado más específicamente mediante

4. Procedimiento según la reivindicación 1, en el que el ensanchamiento Doppler máximo preliminar al cuadrado es estimado calculando una diferencia entre una autocorrelación a un retraso mínimo de T segundos y una autocorrelación calculada para otro retraso que es un múltiplo k de T segundos, siendo normalizada la diferencia por una división con la autocorrelación a un retraso de T segundos y por una división con un numerador que es k al cuadrado menos 1, siendo escalado el cociente con pi al cuadrado y el retraso T en segundos al cuadrado.
5. Procedimiento según la reivindicación 1 ó 4, en el que el ensanchamiento Doppler máximo preliminar al cuadrado es estimado más específicamente mediante

6. Procedimiento de estimación del ensanchamiento Doppler según la reivindicación 1, que comprende las etapas de
estimar más específicamente el valor con sesgo corregido según la relación

K3 y Km son unas constantes.
7. Procedimiento según la reivindicación 6, en el que Km se determina según

para i = 3, ....., m.
8. Procedimiento según la reivindicación 6, en el que Km se determina según (32d)

para i = 3, ......, m, donde k es un entero.
9. Procedimiento según la reivindicación 2, en el que el ensanchamiento Doppler máximo preliminar al cuadrado se estima más específicamente mediante

10. Procedimiento según la reivindicación 3, en el que el ensanchamiento Doppler máximo preliminar al cuadrado se estima más específicamente mediante

11. Receptor (RX) para la comunicación con un transmisor (TX), comprendiendo el receptor una unidad (X) de demodulación y una unidad (DEU) de estimación Doppler, realizando la unidad de estimación Doppler una estimación del ensanchamiento Doppler de la señal recibida según cualquiera de las reivindicaciones anteriores.
12. Receptor según la reivindicación 11, en el que la estimación del ensanchamiento Doppler es usada para definir un intervalo TACC de acumulación para decodificar la señal recibida.
13. Receptor según la reivindicación 12, en el que la estimación del ensanchamiento Doppler es usada para estimar la calidad del canal h(t) de radio.
Patentes similares o relacionadas:
Método y sistema para una transmisión bidireccional simultanea de portadoras múltiples mediante una multiplexación por división ortogonal de la frecuencia, del 28 de Septiembre de 2016, de HUAWEI TECHNOLOGIES CO., LTD.: Un método para transmisión en dúplex OFDM por portadoras múltiples, que comprende: la realización simultánea , por un dispositivo de extremo cercano, en al menos […]
CONTROL DE POTENCIAY ASIGNACIÓN DE SUBPORTADORAS, DEPENDIENTES DE EFECTO DOPPLER, EN SISTEMAS DE ACCESO MÚLTIPLE POR OFDM, del 20 de Junio de 2011, de TELEFONAKTIEBOLAGET LM ERICSSON: Un procedimiento de transmisión de símbolos de datos digitales desde un transceptor hasta al menos dos transceptores remotos en un sistema de comunicaciones inalámbricas, […]
ESTIMACION DE LA COMPENSACION DEL DESPLAZAMIENTO DOPPLER EN UN SISTEMA DE COMUNICACIONES MOVIL., del 1 de Mayo de 2003, de NOKIA NETWORKS OY: Sistema para generar un factor de corrección Doppler para compensar el desplazamiento Doppler de una señal transmitida entre una estación móvil y una estación base en un sistema […]
DISPOSITIVO DE CORRECCION DE UN DESPLAZAMIENTO DE FRECUENCIA DEBIDO AL EFECTO DOPPLER EN UN SISTEMA DE TRANSMISION., del , de ALCATEL: LA PRESENTE INVENCION CONCIERNE A UN DISPOSITIVO DE CORRECCION DE UN DESFASE DE FRECUENCIA DEBIDO AL EFECTO DOPPLER EN UN SISTEMA DE TRANSMISION. EL DISPOSITIVO […]
TRANSFORMADOR AISLADO POR GAS, del 1 de Mayo de 1999, de SCHLUMBERGER INDUSTRIES: UN TRANSFORMADOR AISLADO POR GAS QUE COMPRENDE UN NUCLEO MAGNETICO JUNTO CON DEVANADOS PRIMARIO Y SECUNDARIO CONTENIDOS DENTRO DE UNA CARCASA O APLICADOS […]
DEMODULADOR DIGITAL CON CORRECCION DE FRECUENCIA., del 1 de Julio de 1998, de ALCATEL ESPACIO, S.A.: DEMODULADOR DIGITAL CON CORRECCION DE FRECUENCIA. DE ESPECIAL APLICACION EN COMUNICACIONES ESPACIALES, DONDE LOS MOVIMIENTOS DEL SATELITE GENERAN DESPLAZAMIENTOS […]
 DETERMINACION DE DESPLAZAMIENTOS DE FRECUENCIA EN SISTEMAS DE COMUNICACIONES, del 16 de Abril de 2008, de QUALCOMM INCORPORATED: Un procedimiento para determinar los desplazamientos de frecuencia desde una frecuencia central de señal de comunicaciones deseada en al menos uno de una pluralidad […]
DETERMINACION DE DESPLAZAMIENTOS DE FRECUENCIA EN SISTEMAS DE COMUNICACIONES, del 16 de Abril de 2008, de QUALCOMM INCORPORATED: Un procedimiento para determinar los desplazamientos de frecuencia desde una frecuencia central de señal de comunicaciones deseada en al menos uno de una pluralidad […]
 APARATO PARA CORRECCION DOPPLER EN UN SISTEMA DE COMUNICACIONES INALAMBRICAS, del 16 de Marzo de 2008, de QUALCOMM INCORPORATED: Un aparato para la corrección de frecuencia en un sistema de comunicaciones inalámbricas, en el que las transmisiones dentro del sistema experimentan un efecto Doppler, […]
APARATO PARA CORRECCION DOPPLER EN UN SISTEMA DE COMUNICACIONES INALAMBRICAS, del 16 de Marzo de 2008, de QUALCOMM INCORPORATED: Un aparato para la corrección de frecuencia en un sistema de comunicaciones inalámbricas, en el que las transmisiones dentro del sistema experimentan un efecto Doppler, […]