EMULADOR ELECTRONICO DE SISTEMAS DINAMICOS.
Emulador electrónico de sistemas dinámicos.
La presente invención tiene por objeto un dispositivo de cómputo optimizado para resolver sistemas de ecuaciones diferenciales obtenidos de un modelo dinámico,
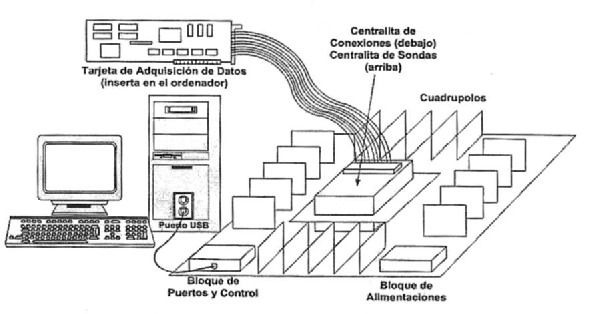
que está compuesto por dos subsistemas: a) una bancada o placa madre, que soporta dos categorías de sistemas electrónicos: cuádruplos eléctricos electrónicamente configurables y centralitas analógicas de interconexión, que se disponen como red de área local; b) un sistema de adquisición de datos conectado a un PC. El PC soporta a su vez un software de análisis de datos en tiempo real
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200600893.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Provincia: SEVILLA.
Inventor/es: PALOMO PINTO,FRANCISCO ROGEL, LOPEZ FERNANDEZ,PEDRO DAVID.
Fecha de Solicitud: 31 de Marzo de 2006.
Fecha de Publicación: .
Fecha de Concesión: 21 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- G06G7/62 FISICA. › G06 CALCULO; CONTEO. › G06G COMPUTADORES ANALOGICOS (dispositivos de cálculo óptico analógico G06E 3/00; sistemas de computadores basados en modelos de cálculo específicos G06N). › G06G 7/00 Dispositivos en los que la operación de cálculo es efectuada haciendo variar valores eléctricos o magnéticos (redes neuronales para el tratamiento de datos de imagen G06T; análisis o síntesis de la voz G10L). › para sistemas o aparatos eléctricos.
- G06J3/00 G06 […] › G06J DISPOSICIONES DE CALCULO HIBRIDO (dispositivos de cálculo óptico híbrido G06E 3/00; sistemas de computadores basados en modelos de cálculo específicos G06N; redes neuronales para el tratamiento de datos de imagen G06T; conversión analógico/digital en general H03M 1/00). › Sistemas para acción en coordinación de computadores digitales y analógicos.
Clasificación PCT:
Fragmento de la descripción:
Emulador electrónico de sistemas dinámicos.
Objeto de la invención
La presente invención tiene por objeto un dispositivo de cómputo optimizado para resolver sistemas de ecuaciones diferenciales obtenidos de un modelo dinámico, que está compuesto por dos subsistemas: a) una bancada ó placa madre, que soporta dos categorías de sistemas electrónicos: cuádruplos eléctricos electrónicamente configurables y centralitas analógicas de interconexión, que se disponen como red de área local; b) un sistema de adquisición de datos conectado a un PC. El PC soporta a su vez un software de análisis de datos en tiempo real.
Estado de la técnica
Existen dos técnicas similares, las computadoras analógicas clásicas (o GPAC, General Purpose Analog Computer) y las computadoras digitales híbridas.
Una computadora analógica representa la información como valores continuos (señales) de un sistema físico. En una computadora analógica electrónica las señales son de tensión o de corriente. La programación de una computadora electrónica analógica se realiza mediante el ensamblaje (y/o la configuración) de los componentes de circuito apropiados en un sistema electrónico cuyas señales son análogas a las soluciones del modelo matemático a computar.
Existen dos tipos de computadoras analógicas: las indirectas y las directas. Las computadoras analógicas indirectas o GPAC's (General Purpose Analog Computer, descritas por C. Shannon circa 1950) implementan funciones matemáticas mediante la combinación de bloques de circuitería analógica que, individualmente, representan funciones matemáticas predefinidas (multiplicadores, sumadores, integradores, derivadores, etc, la mayoría de ellos empleando circuitos con amplificadores operacionales).
Para establecer la relación entre un modelo matemático y su análogo indirecto es necesario realizar un análisis funcional del modelo (típicamente un análisis de Laplace). La GPAC implementa un el modelo funcional y no el modelo dinámico. La GPAC genera señales análogas a las medidas en el sistema dinámico pero no comparte con él la misma estructura matemática subyacente. No resultan especialmente apropiadas para computar sistemas de ecuaciones diferenciales no lineales porque en este caso los modelos funcionales se vuelven muy complejos.
Las GPAC's no se emplean actualmente porque las computadoras digitales programables las han superado en términos de precisión, velocidad y versatilidad en su principal aplicación, la resolución de sistemas de ecuaciones diferenciales lineales. Hoy en día sólo pueden verse GPAC's simuladas, por ejemplo en el lenguaje de modelado de sistemas dinámicos Simulink de la empresa Mathworks, Inc.
Las computadoras analógicas directas no necesitan de un análisis funcional del modelo. En ellas la dinámica del circuito electrónico ensamblado y configurado es idéntica a la dinámica del modelo matemático a resolver. El ensamblaje se limita a la interconexión de elementos de circuito básicos, así condensadores, bobinas, resistencias, amplificadores, etc. El conjunto de ecuaciones del sistema dinámico emerje analizando con la teoría de circuitos la topología y las características de operación del circuito electrónico sintetizado.
Una computadora analógica directa es realmente una emulación del sistema dinámico a estudiar porque es idéntico a él no sólo en las señales que genera sino también en la estructura matemática subyacente.
No se puede decir que las computadoras analógicas directas hayan sido superadas por las computadoras digitales programables. En problemas fuertemente no lineales el análisis de las señales de la computadora analógica directa es más rápido que la simulación digital del conjunto de ecuaciones no lineales del modelo.
Por su carácter de emuladores de sistemas dinámicos las computadoras analógicas directas tienen, además, un interés intrínseco para el prototipado rápido de sistemas dinámicos y para el diseño de circuitos electrónicos fuertemente no lineales. Por encima de un nivel de complejidad los simuladores de circuitos (por ejemplo PSpice de Cadence Design Systems, Inc) se encuentran con serios problemas de recursos. Esos problemas son resueltos por la computadora analógica directa mediante la implementación del circuito electrónico a estudiar o en su defecto de un modelo a escala.
Una computadora híbrida es cualquier tipo de computadora que mezcle técnicas digitales con técnicas analógicas para la resolución de problemas de cómputo.
Las computadoras híbridas actuales, llamadas computadoras digitales híbridas, mezclan procesadores digitales de uso general (microprocesadores o incluso procesadores digitales de señal, también conocidos como DSP's o Digital Signal Processors) con matrices de puertas lógicas reconfigurables por efecto de campo (FPGA, Field Programmable Gate Array). Un ejemplo de compañía que comercializa estas arquitecturas es SRC, Inc. El objetivo de estas computadoras híbridas no es la emulación de sistemas dinámicos sino la consecución de mayores cotas de paralelismo en cálculos digitales.
Existen incluso intentos de construcción de computadoras analógicas indirectas (GPAC's) utilizando emuladores digitales de los bloques analógicos mediante el empleo de FPGA's. Hablaríamos de una computadora híbrida de análogo indirecto. Por ejemplo
The Digital Implementation of Analog Computer Modules, Tesina de Licenciatura, Joshua Gan, Department of Electrical and Computer Engineering, University of Queensland, Australia, 1997.
Se recoge en la literatura científico-técnica propuestas de computadoras configurables para la solución de problemas de algoritmos genéticos; el campo se conoce como evolvable hardware. Por ejemplo ver:
Jim Torresen. Evolvable Hardware as a New Computer Architecture. International Conference on Advances in Infrastructure for Electronic Business, Education, Science, and Medicine on the Internet (SSGRR 2002W), January 2002, L`Aquila, Italy.
Pero tampoco abordan la solución mediante señales de problemas de ecuaciones diferenciales no lineales (sistemas dinámicos) sino la solución de problemas de algoritmos genéticos mediante computadoras híbridas digitales aprovechando la reconfigurabilidad de las FPGA's.
El emulador electrónico de sistemas dinámicos, objeto de esta patente, es clasificable, según la discusión anterior, como una computadora híbrida de análogo directo. En el cómputo, es decir, la solución del sistema de ecuaciones diferenciales no lineales, se comporta como una computadora analógica directa: el cómputo consiste en la síntesis de un circuito análogo directo, puesta en marcha del mismo y posterior adquisición y análisis de las señales eléctricas. La síntesis del circuito se realiza mediante la configuración de un conjunto de cuadrupolos eléctricos y mediante la interconexión de los mismos a través de una matriz electrónica de interconexiones.
Por otro lado también es una computadora híbrida porque emplea:
1. para la programación de la computadora, microprocesadores en red de área local que realizan una configuración electrónica de los cuadrupolos eléctricos disponibles, centralitas analógicas de mando digital (también conocidas como matrices electrónicas de conexiones o, en inglés, crossbar switches) que estructuran la conexión eléctrica entre los cuadrupolos.
2. y un PC con tarjeta de adquisición de datos para la captura de señales. y su posterior análisis matemático en tiempo real mediante la tecnología de instrumentación virtual (patentada por National Instruments, Inc y denominada LabVIEW aunque también se puede encontrar bajo otra denominación en Agilent VEE de Agilent Technologies, Inc.
Por tanto se trataría de una nueva forma de computo no recogido en las alternativas anteriores. Respecto a la alternativa de cálculo numérico en una computadora digital presenta la ventaja de su mayor rapidez, sin limitaciones de recursos de cómputo. Además puede emplearse para labores de prototipado rápido cuando se trata de diseñar circuitos electrónicos fuertemente no lineales. Los entornos software de diseño electrónico se encuentran con serios problemas de recursos frente a las simulaciones de circuitos electrónicos fuertemente no lineales.
Descripción de la invención
El emulador electrónico de sistemas dinámicos, objeto de esta patente, es un dispositivo de cómputo optimizado para resolver sistemas de ecuaciones diferenciales obtenidos...
Reivindicaciones:
1. Emulador electrónico de sistemas dinámicos caracterizado porque el circuito electrónico se sintetiza con cuádruplos eléctricos programables mediante microprocesador, interconectados a través de una centralita digitalmente comandada que establece conexiones analógicas y conectados a un sistema de adquisición de datos a través de una centralita digitalmente comandada que establece conexiones de medida entre puntos de los cuádruplos y canales del sistema de adquisición de datos.
2. Emulador electrónico de sistemas dinámicos según reivindicación anterior caracterizado porque el comando digital tiene lugar mediante una red de área local MODBUS que interconecta los microprocesadores de las centralitas y de los cuádruplos (esclavos MODBUS) con un PC (maestro MODBUS), de tal manera que la interfaz de usuario del sistema se ejecuta en un ordenador personal (PC) y controla el comando digital del sistema, la presentación de datos y la programación de análisis de datos.
3. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque realiza cálculos analógicos de sistemas de ecuaciones diferenciales forzadas o autónomas mediante síntesis de un circuito electrónico cuyas ecuaciones de funcionamiento, obtenidas por aplicación de las leyes de Kirchoff, coinciden con el sistema de ecuaciones a resolver.
4. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque la solución de las ecuaciones a resolver se obtiene capturando, mediante un sistema de adquisición de datos, las señales generadas por la operación del circuito sintetizado.
5. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque el cuádruplo eléctrico configurable se implementa como tarjetas de circuito impreso insertables en zócalos, dotadas de un microcontrolador, circuitería de actuación y un banco de componentes eléctricos irreducibles o un componente eléctrico irreducible configurable.
6. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque permite variar la topología de conexión de los cuádruplos mediante una centralita comandable digitalmente de interconexiones analógicas conectado a un microcontrolador de configuración a su vez conectado a una red MODBUS por bus serie.
7. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque permite variar qué puntos de medida de los cuadrupolos se conectan a través de sondas compensadas a qué canales del sistema de adquisición de datos mediante una centralita comandable digitalmente de interconexiones analógicas conectado a un microcontrolador de configuración a su vez conectado a una red MODBUS por bus serie.
8. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque dispone de un microcontrolador en cada elemento del sistema, a excepción del PC, con rutinas de servicio preprogramadas para realizar distintos análisis a petición del PC.
9. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque dispone de un PC para procesar y analizar los datos adquiridos en tiempo real, realizando un análisis matemático en tiempo real de las series temporales.
10. Emulador electrónico de sistemas dinámicos según reivindicaciones anteriores caracterizado porque el análisis matemático es un estudio en el espacio de fases del sistema dinámico (selección de componentes única), un estudio en el espacio de parámetros para diagramas de bifurcación (barrido en los valores de componentes) ó un estudio de familias topológicas de sistemas (barrido en las interconexiones entre cuádruplos).
Patentes similares o relacionadas:
ANALIZADOR DE REDES ELECTRICAS Y DE PROCESOS DE COMBUSTION., del 16 de Abril de 1990, de AUROTRONICS, S.A.: ANALIZADOR DE REDES ELECTRICAS Y DE PROCESOS DE COMBUSTION. COMPRENDE UN MICROPROCESADOR COMUN A LOS CIRCUITOS DE MEDICION DE MAGNITUDES ELECTRICAS […]