DISPOSITIVO PROYECTOR PROVISTO DE UN SISTEMA DE DETERMINACION DE POSICION O DE VARIACION DE POSICION.
Dispositivo (1) proyector provisto de un sistema de determinación de posición o de variación de posición del dispositivo proyector alrededor de un eje (3) en rotación,
comprendiendo este sistema un medio (6) de medida para determinar valores de la posición en la totalidad de una gama (13) de valores asociados a la posición del dispositivo (1) proyector, caracterizado por el hecho de que el medio (6) de medida comprende, en la gama (13) de valores asociados a la posición del dispositivo (1) proyector, un intervalo (14) de sensibilidad elevada y al menos un intervalo (15) de sensibilidad reducida
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04291312.
Solicitante: VALEO VISION.
Nacionalidad solicitante: Francia.
Dirección: 34, RUE SAINT-ANDRE,93012 BOBIGNY CEDEX.
Inventor/es: DARI, ALAIN, L\'HERMINE, ALBAN, CHEVE,REMY, UHRICH,ARNAUD.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Mayo de 2004.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B60Q1/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › B60Q 1/00 Disposición de dispositivos de señalización óptica o de iluminación, su montaje, su soporte o los circuitos a este efecto (para la iluminación del interior del vehículo B60Q 3/00). › según la inclinación del vehículo, p. ej. según la repartición de la carga.
- B60Q1/12 B60Q 1/00 […] › según la orientación de la dirección.
Clasificación PCT:
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo proyector provisto de un sistema de determinación de posición o de variación de posición.
La presente invención se refiere a un módulo de iluminación, o dispositivo proyector, provisto de un sistema de determinación de posición o de variación de posición giratoria. El dispositivo según la invención se utiliza en el sector de los proyectores de vehículo. El dispositivo según la invención comprende un medio de medida que permite entre otros, limitar al máximo un tiempo de una fase de inicialización o de establecimiento de una referencia en el momento de la puesta bajo tensión del dispositivo. Durante esta fase de inicialización, el dispositivo proyector se coloca en una posición que le sirve de referencia para sus desplazamientos ulteriores en el espacio. El dispositivo proyector según la invención suprime movimientos que estorban en esta fase de inicialización.
La invención halla una aplicación especialmente ventajosa, pero no exclusiva, para medir o determinar una posición de un dispositivo proyector rotativo de un vehículo automóvil. Gracias a la invención, se puede en especial ajustar una posición de un proyector rotativo en función de un desplazamiento de vehículo. De una manera más general, la invención podría convenir a todos los dispositivos de iluminación montados en vehículos como motos, trenes, barcos o aviones.
Se sabe que, en especial en el sector de los vehículos automóviles, se realizan dispositivos proyectores que tienen una dirección de iluminación variable. Esta dirección de iluminación variable permite por ejemplo al vehículo de adaptarse a una curvatura de la carretera o proceder a una corrección del asiento. La adaptación a la curvatura de la carretera o la corrección del asiento proporciona al conductor una sensación de seguridad óptima.
Hoy en día, los dispositivos proyectores existentes comprenden a menudo unos accionadores paso a paso o unos motores paso a paso. En cada puesta bajo tensión de los accionadores, una fase de inicialización, previa al empleo de estos accionadores, es necesaria con el fin de calibrarlos. En esta fase de inicialización, el dispositivo proyector se lleva a una posición axial. Esta posición axial corresponde a una orientación del dispositivo proyector en línea recta y a velocidad constante. Estos accionadores disponen en general de topes de fin de carrera. En las fases de inicialización habituales, los accionadores se apoyan contra estos topes. De este modo, el accionador se despliega sobre toda su carrera, hasta uno de los topes. Esta posición de tope puede considerarse como posición de referencia. A continuación, se calcula un número de pasos o una distancia a partir de esta posición de referencia, con la finalidad de llevar el proyector a la posición axial.
Se conoce por ejemplo del artículo "Neue Konzepte der automatischen Leuchtweiteregelung auf Basis eines innovativen, induktiven Drehwinkelsensores" de la revista "ATZ Automobiltechnische Zeitschrift", Franckh'sche Verlagshandlung, Stuttgart, DE, vol 100, N° 11, páginas 820-822, 824-826, un dispositivo de corrección del alcance de los proyectores de un vehículo automóvil en función del asiento de este vehículo, siendo esta información suministrada por unos sensores inductivos.
Se conocen también sensores llamados sensores de copia o de recopia. Para estos sensores, un valor es producido y asociado a la posición del dispositivo proyector sobre todo el intervalo de rotación posible del proyector y para cada posición del dispositivo proyector rotativo alrededor de su eje. De este modo se puede determinar con precisión para cada valor producido la posición exacta de un proyector.
Sin embargo, estos sistemas del estado de la técnica presentan limitaciones. Efectivamente, recorrer toda la carrera de un accionador paso a paso para obtener una posición de referencia induce un movimiento intempestivo del dispositivo proyector. Este movimiento intempestivo del dispositivo proyector puede conducir a un estorbo o a un deslumbramiento de un conductor. Efectivamente, el conductor que se cruza con un vehículo cuyo dispositivo proyector está en fase de inicialización puede ser deslumbrado por este dispositivo debido a la naturaleza aleatoria de una orientación del dispositivo proyector en el momento de la fase de inicialización. Por otro lado, el movimiento intempestivo del dispositivo proyector perjudica sistemáticamente a la disponibilidad del dispositivo. Recorrer el conjunto de la carrera del accionador precisa de una duración no despreciable. Esta duración puede alcanzar aproximadamente tres segundos durante los cuales el conductor no controla sus proyectores.
Por lo que respecta al sensor de recopia, que proporciona todas las posiciones posibles que un proyector puede adoptar, es difícil de realizar con un precio razonable, y también es difícil de realizar en términos de resolución y de precisión. Efectivamente, para cada posición del dispositivo proyector, la incertidumbre en la medida debe ser muy reducida. En el caso en que la incertidumbre en la medida de la posición resultara demasiado elevada, podría darse una deriva de la posición del dispositivo proyector del vehículo con respecto a la curvatura de una carretera. Entonces, el proyector no iluminaría correctamente la carretera.
La calibración en serie de un sensor de recopia es difícil y larga. Para esta calibración de material, es necesario introducir en memoria todos los valores posibles asociados a todas las posiciones posibles que el dispositivo proyector puede adoptar.
También, la presente invención tiene como objetivo el de proponer un dispositivo proyector que dé remedio entre otros estos problemas de disponibilidad, de calibrado, de coste, de prevención contra el deslumbramiento y de recentrado en caso de deriva de los sistemas existentes. El dispositivo proyector resuelve estos problemas esencialmente durante las fases de inicialización.
A tal efecto, en un dispositivo proyector provisto de un amplio intervalo de rotación alrededor de una posición determinada, se integra un medio de medida eventualmente programable. Este medio de medida permite medir una posición del dispositivo proyector en una amplia gama de rotación. Esta gama de rotación puede por ejemplo descomponerse en un intervalo limitado alrededor de una posición determinada y en dos intervalos laterales de parte y otra del intervalo limitado. La información acerca de la posición del dispositivo proyector determinada por el intervalo limitado es muy precisa: el intervalo limitado tiene una sensibilidad elevada. En cambio, en los intervalos laterales, la información determinada sobre la posición del dispositivo proyector es mucho más basta: los intervalos laterales tienen una sensibilidad muy reducida.
Sin embargo, en los intervalos laterales, se puede determinar la posición del dispositivo proyector suficientemente con precisión para llevarlo a una posición que pertenece al intervalo limitado. El hecho de poder llevar el módulo a un intervalo limitado en el cual se conoce con precisión la posición del dispositivo proyector suprime el problema de la puesta a tope intempestiva. Efectivamente, ya no es necesario crear referencias en el espacio a través de este tope: todos los valores comprendidos en este intervalo limitado son todos dependientes de un único y mismo valor de referencia. Todos los valores del intervalo limitado pueden potencialmente ser considerados o asimilados a unas posiciones de referencia.
En el caso en que el dispositivo proyector está situado fuera del intervalo limitado de sensibilidad elevada, justo antes de la fase de inicialización, el desplazamiento rápido y único del dispositivo proyector hacía el intervalo limitado permite evitar a otros conductores un deslumbramiento eventual por el dispositivo proyector.
En una realización particular de la invención, el sensor utilizado con la finalidad de obtener los diferentes intervalos y los diferentes niveles de sensibilidad es un sensor de efecto Hall. La tensión obtenida a la salida del sensor de efecto Hall es monótona con respecto a determinadas posiciones angulares del dispositivo proyector rotativo. En un ejemplo, unos valores de las tensiones son determinados a partir de una posición de referencia. Una zona lineal de la característica del sensor de efecto Hall corresponde al intervalo limitado descrito más arriba. El dispositivo proyector también puede situarse en posiciones asociadas a unos intervalos situados de parte y otra del intervalo limitado. En este caso, el sensor se satura y suministra una tensión constante para cada uno de estos...
Reivindicaciones:
1. Dispositivo (1) proyector provisto de un sistema de determinación de posición o de variación de posición del dispositivo proyector alrededor de un eje (3) en rotación, comprendiendo este sistema un medio (6) de medida para determinar valores de la posición en la totalidad de una gama (13) de valores asociados a la posición del dispositivo (1) proyector, caracterizado por el hecho de que el medio (6) de medida comprende, en la gama (13) de valores asociados a la posición del dispositivo (1) proyector, un intervalo (14) de sensibilidad elevada y al menos un intervalo (15) de sensibilidad reducida.
2. Dispositivo según la reivindicación 1 caracterizado por el hecho de que el intervalo (14) de sensibilidad elevada corresponde a un entorno de una posición (10) axial del dispositivo proyector.
3. Dispositivo según cualquiera de las reivindicaciones 1 a 2 caracterizado por el hecho de que el intervalo (15) de sensibilidad reducida corresponde a un conjunto de posiciones en los bordes de la gama (13).
4. Dispositivo según cualquiera de las reivindicaciones 1 a 3 caracterizado por el hecho de que el medio (6) de medida produce en el intervalo (14) de sensibilidad elevada unos valores de la posición linealmente dependientes de la posición giratoria del dispositivo (1) proyector.
5. Dispositivo según cualquiera de las reivindicaciones 1 a 4 caracterizado por el hecho de que el medio (6) de medida tiene una posición (17) de referencia en el intervalo (14) de sensibilidad elevada.
6. Dispositivo según la reivindicación 5 caracterizado por el hecho de que el intervalo (14) de sensibilidad elevada del medio de medida corresponde a un movimiento (2) del dispositivo proyector entre más o menos cinco grados alrededor de la posición (17) de referencia.
7. Dispositivo según cualquiera de las reivindicaciones 1 a 6 caracterizado por el hecho de que el medio (6) de medida tiene una precisión de más o menos 0,3 grados en el intervalo de sensibilidad elevada.
8. Dispositivo según cualquiera de las reivindicaciones 1 a 7 caracterizado por el hecho de que el medio (6) de medida es un sensor (6) de efecto Hall.
9. Dispositivo según la reivindicación 8 caracterizado por el hecho de que el sensor (6) de efecto Hall comprende un registro programable.
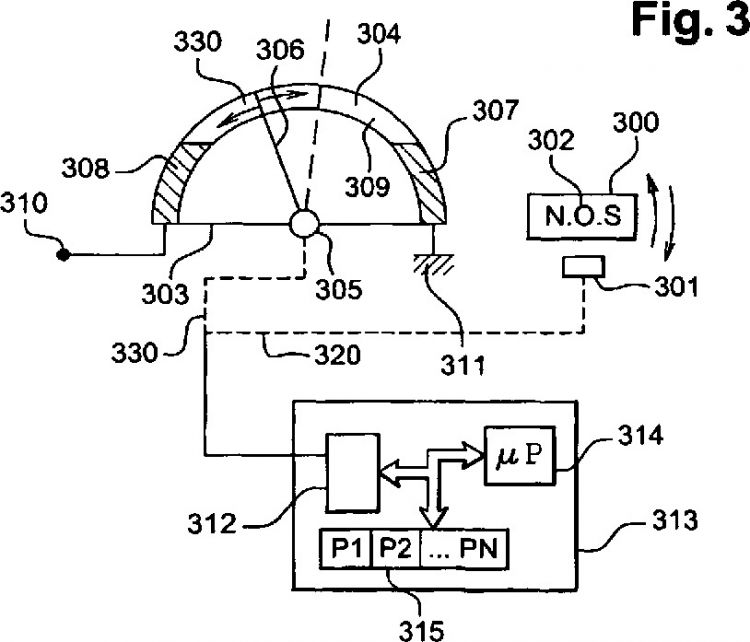
10. Dispositivo según cualquiera de las reivindicaciones 3 a 7 caracterizado por el hecho de que el medio (6) de medida comprende una resistencia (304) variable dispuesta alrededor del eje (305) de rotación, cuyo valor varía con un movimiento de un cursor (306) llevado por el eje (305) de rotación, la resistencia variable que tienen un primer valor de tolerancia para un primer conjunto de posiciones del cursor (306) correspondientes a los intervalos (15, 16) en los bordes de la gama y un segundo valor de tolerancia inferior al primer valor para un segundo conjunto de posiciones del cursor correspondiente al intervalo (14) de sensibilidad elevada.
11. Dispositivo según cualquiera de las reivindicaciones 1 a 10 caracterizado por el hecho de que el medio (6) de medida está asociado a un módulo (313) programable provisto de un microprocesador (314) con memorias (312, 315) o un microcontrolador (313), almacenando una de las memorias (312, 315) del microprocesador (314) o del microcontrolador (313) en memoria la posición (17) de referencia y/o una tabla que da correspondencias entre valores producidos por el medio (6) de medida y la posición del dispositivo (1) proyector.
12. Dispositivo según cualquiera de las reivindicaciones 1 a 11 caracterizado por el hecho de que el eje (3) de rotación del dispositivo (1) proyector es horizontal.
13. Dispositivo según cualquiera de las reivindicaciones 1 a 11 caracterizado por el hecho de que el eje (3) de rotación del dispositivo (1) proyector es vertical.
14. Vehículo automóvil caracterizado por el hecho de que comprende un dispositivo (1) proyector según cualquiera de las reivindicaciones anteriores.
Patentes similares o relacionadas:
Unidad de luz para uso en vehículo que se inclina al virar, método para ajustarla, vehículo que se inclina al virar, y método para ajustarlo, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Vehículo con una unidad de luz , el vehículo puede inclinarse al virar mientras el vehículo está circulando, incluyendo la unidad de […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar una unidad de faro secundario para uso en un vehículo que se inclina al virar, del 20 de Junio de 2018, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo que se inclina al virar, incluyendo el vehículo una fuente de luz de faro principal y un sistema de faro secundario para uso […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar la emisión de luz de una unidad de faro secundario, del 3 de Mayo de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo que se inclina al virar, incluyendo el vehículo un faro principal , y una unidad de faro secundario (13L, 13R) que es diferente del faro principal […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar una unidad de faro secundario, del 5 de Abril de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una unidad de faro secundario (13L, 13R) para uso en un vehículo que se inclina al virar, donde la unidad de faro secundario (13L, 13R) incluye al menos una fuente de luz de […]
Dispositivo de iluminación con lente móvil para vehículo automóvil, del 23 de Noviembre de 2016, de PSA Automobiles SA: Dispositivo de iluminación para vehículo automóvil , que comprende: - un chasis ; - una óptica que comprende una montura y una lente […]
 Sistema de faros y vehículo del tipo de montar a horcajadas, del 30 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Sistema de faros para instalarse en un vehículo del tipo de montar a horcajadas, que comprende:
una unidad de faros que pueda funcionar en el modo de […]
Sistema de faros y vehículo del tipo de montar a horcajadas, del 30 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Sistema de faros para instalarse en un vehículo del tipo de montar a horcajadas, que comprende:
una unidad de faros que pueda funcionar en el modo de […]
 MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
Sistema de regulación de los faros en un vehículo basculante con mecanismo de balanceo, del 11 de Junio de 2014, de PIAGGIO & C. S.P.A.: Un sistema de regulación de uno o más soportes de las cúpulas (26', 28') de los faros de un vehículo que tiene un chasis , una rueda […]