DISPOSITIVO Y PROCEDIMIENTO DE OBTENCIÓN DE IMAGENES DENSITOMÉTRICAS DE OBJETOS MEDIANTE COMBINACIÓN DE SISTEMAS RADIOLÓGICOS Y CÁMARAS DE PROFUNDIDAD.
Dispositivo y procedimiento de obtención de imágenes densitométricas que comprende al menos un dispositivo radiológico,
al menos un sensor de profundidad y medios de procesado de imágenes que combinan la información de absorción radiológica del conjunto de imágenes radiológicas registradas obtenido con los sistemas radiológicos con unas distancias de material atravesado que proporciona la reconstrucción tridimensional de los objetos obtenida de los sensores de profundidad.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231243.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: ALBIOL COLOMER,Antonio José, ALBIOL COLOMER,Alberto, FERNANDEZ,Avelina, GERMAN,Rodrigo, ALBIOL COLOMER,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T15/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Interpretación de imagines 3D [Tridimensionales].
- G06T15/04 G06T […] › G06T 15/00 Interpretación de imagines 3D [Tridimensionales]. › Mapeado de texturas.
- G06T15/06 G06T 15/00 […] › Trazado de rayos.
Fragmento de la descripción:
Dispositivo y procedimiento de obtención de imágenes densitométricas de objetos mediante combinación de sistemas radiológicos y cámaras de profundidad
OBJETO DE LA INVENCIÓN
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva se refiere en primer lugar a un dispositivo de obtención de imágenes densitométricas de objetos mediante la combinación de sistemas radiológicos y cámaras de profundidad. En segundo lugar se refiere al procedimiento, que mediante el dispositivo mencionado, obtiene imágenes densitométricas de objetos usando una combinación de sistemas radiológicos y cámaras de profundidad. También se han previsto diversos usos del método y procedimiento anteriormente mencionados. Los principales campos de aplicación del dispositivo y método aquí descritos son el de la industria, el médico y la seguridad, y más concretamente el control de calidad de alimentos, control de calidad de piezas industriales y la mejora de dispositivos médicos radiológicos. Nótese que a lo largo de la presente memoria cuando se habla de objetos, se está englobando también individuos y escenas, pudiéndose aplicar la presente invención indistintamente sobre cualquiera de ellos.
ANTECEDENTES DE LA INVENCIÓN
El modelo de formación de imagen permite caracterizar de forma matemática el proceso por el que un punto de la escena se proyecta en una imagen.
Dependiendo de la precisión requerida y de la aplicación se suelen emplear diferentes tipos de modelos de formación como por ejemplo los modelos de “pinhole”, lente fina y lente gruesa.
El modelo “pinhole” (figura 3) es el más sencillo de todos y el más utilizado en el área de la visión por
computador.
Entre los principales parámetros del modelo se encuentran el centro óptico o de proyección y la distancia focal que es la distancia entre el plano de la imagen y el centro óptico. El centro óptico se emplea generalmente como origen del sistema de coordenadas referido a una cámara. En este modelo todos los puntos de la figura 3 contenidos en cualquiera de las líneas de puntos se proyectan sobre un mismo punto en el plano de imagen. Por tanto, cada punto de la imagen representa una recta en el espacio que contiene todos los puntos que se proyectan sobre él. En estéreo-visión se hace uso de esta importante propiedad para poder obtener las coordenadas 3D de un punto mediante triangulación (una recta por cada cámara) .
El modelo “pinhole” ("Multiple View Geometr y in Computer Vision", Hartley, R.I. and Zisserman, A.) puede resultar
excesivamente simple cuando la lente empleada en la cámara produce aberraciones en la imagen proyectada. Algunas de las aberraciones más comunes son: aberración esférica, coma, astigmatismo, distorsión radial/tangencial y curvatura de campo.
El conjunto de todos los parámetros que permiten modelar el proceso proyectivo y las distorsiones producidas por las lentes se conocen como parámetros intrínsecos de la cámara.
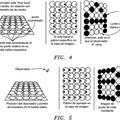
Dependiendo del tipo de cámara la información que se proyecta en cada punto de la imagen puede tener distinta naturaleza. Por ejemplo, en una imagen RGB, cada pixel proporciona información sobre la zona de interacción de la luz que incide en la superficie y es reflejada al plano de la cámara (figura 5) . En imágenes de rayos X, cada pixel corresponde a la intensidad atenuada debido a los fenómenos de absorción y difracción entre dos superficies que limitan un volumen.
Las cámaras de profundidad son sensores que permiten crear imágenes bidimensionales en las que cada pixel contiene la información de la distancia entre el punto de la escena que representa y el plano de la cámara. En ocasiones, tras un proceso de calibración, es posible obtener las tres coordenadas espaciales de los puntos de la escena que tienen información de profundidad.
Existen múltiples técnicas para obtener la profundidad de una escena. Una primera clasificación distinguiría entre técnicas pasivas o técnicas activas. En el primer caso la profundidad se obtiene en la mayoría de los mediante casos mediante triangulación. Para ello se emplean las imágenes obtenidas por dos o más cámaras RGB y se resuelve el problema de la correspondencia. La ventaja fundamental de los métodos pasivos es que no se requieren unas condiciones especiales de iluminación y son adecuados para trabajar en el exterior con luz del día. El inconveniente de las cámaras pasivas es que en el problema de la correspondencia es de difícil solución en zonas homogéneas tanto en intensidad como en color.
En el caso de las técnicas activas la escena es iluminada de forma artificial con un patrón de luz que mediante un procesado adecuado permite recuperar la profundidad.
Una de las técnicas pioneras en este campo ilumina la escena mediante un haz de luz con forma lineal. La deformación de la proyección de dicho haz al incidir con los objetos de la escena se puede relacionar con la profundidad mediante triangulación, siempre que sean conocidas la posición de la fuente de luz y de la cámara que capta la imagen. Mediante el movimiento relativo del haz de luz respecto de los objetos a medir es posible obtener un conjunto de perfiles que forman la imagen de profundidad. El inconveniente de esta técnica es que el tiempo de adquisición de una imagen de profundidad es grande ya que en cada instante de tiempo se obtiene únicamente un perfil de intensidades.
Una forma alternativa de obtener la imagen de profundidad con una única imagen es emplear luz estructurada. En este caso lo que se suele proyectar es un patrón de luz conocido como por ejemplo un conjunto de líneas horizontales o verticales. De nuevo el análisis de las deformaciones de dicho patrón permite conocer la profundidad en múltiples perfiles.
Las cámaras de tiempo de vuelo emplean una técnica alternativa parecida a la que se emplea en sistemas radar. En este caso se emplea un sensor específico que mide el tiempo de vuelo de un pulso de luz. La ventaja respecto a los sistemas radar es que es posible obtener la profundidad de todos los puntos de la imagen de forma simultánea y no es necesario realizar ningún barrido de un haz puntual.
Recientemente ha aparecido en el mercado un nuevo tipo de cámaras de profundidad de muy bajo coste que emplean un tipo diferente de luz estructurada que conoce como luz codificada. Aunque inicialmente estas cámaras fueron diseñadas para aplicaciones relacionadas con el ocio, su bajo coste ha propiciado que aparezcan gran cantidad de nuevas aplicaciones en muchos ámbitos diferentes (US 2010/0199228 A1, patente Kinect) . Este tipo de cámaras también son conocidas como RGB-D, esto es porque para cada punto se tiene tanto la información de color como la de profundidad. Esto es posible porque el patrón de luz codificada se encuentra en el infrarrojo cercano.
Las cámaras 3D tienen numerosas aplicaciones en campos como el diseño industrial y medicina. En estos casos las cámaras se emplean bien para el registro o bien para modelado de objetos. En otros campos de aplicación como el de la video vigilancia o la conducción asistida, la información de profundidad es muy útil para resolver ambigüedades que son muy difíciles de resolver empleando únicamente la información de una imagen RGB convencional.
El conjunto de sistemas para la reconstrucción de la superficie de un objeto es lo que se denomina “cámara de profundidad”. Si este sistema acompaña la medida de la textura del objeto se denomina “cámara de profundidad y textura”.
Las técnicas de rayos X (y rayos gamma) se emplean comúnmente desde principios del siglo XX en análisis no destructivos (Industrial Radiology: Theor y and Practice R.Halmshaw.; Niet-destructief onderzoek. ISBN 90-4071147-X (Dutch) W.J.P. Vink; Non-destructive analysis: Application of machine vision to food and agriculture: a review. Davies E.R.) , tanto en diagnóstico clínico como en inspección de objetos y han dado lugar a grandes avances tecnológicos tanto en el desarrollo de detectores como en métodos de producción. Las imágenes radiográficas se obtienen colocando una fuente natural o artificial de rayos X o rayos gamma que atraviesa parte o todo el objeto a examinar, y un detector generalmente plano o lineal al otro lado. Las diferencias de absorción debidas a la naturaleza de los materiales y al espesor de material atravesado conforman una imagen de intensidades en el detector.
La diferencia fundamental entre referirse a rayos X frente a rayos gamma es que los primeros provienen de una fuente que genera un espectro continuo de fotones, mientras que los rayos gamma que provienen de desexcitaciones...
Reivindicaciones:
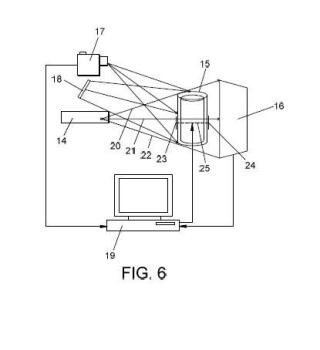
1. Dispositivo de obtención de imágenes densitométricas de objetos mediante combinación de sistemas radiológicos y cámaras de profundidad, caracterizado porque al menos comprende:
• al menos un dispositivo radiológico, que proporciona un conjunto de imágenes radiológicas registradas donde las imágenes radiológicas comprenden información de absorción radiológica de los objetos;
• al menos un sensor de profundidad que proporciona un conjunto de imágenes de profundidad registradas que permiten la reconstrucción tridimensional de parte de las superficies que constituyen los objetos;
• medios de procesado de imágenes que combinan la información de absorción radiológica del conjunto de imágenes radiológicas registradas con unas distancias de material atravesado que proporciona la reconstrucción tridimensional de los objetos.
2. Dispositivo de obtención de imágenes densitométricas, según la reivindicación 1, caracterizado por que al menos uno de los sensores de profundidad comprende medios de desplazamiento de su posición relativa respecto al resto del dispositivo manteniendo el registro.
3. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones 1 o 2, caracterizado por que al menos uno de los sistemas radiológicos comprende medios de desplazamiento de su posición relativa respecto al resto del dispositivo manteniendo el registro.
4. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende un sistema de marcas en ubicaciones fijas preestablecidas y reconocibles por parte del al menos un dispositivo radiológico y del al menos un sensor de profundidad que permite la calibración del dispositivo de obtención de imágenes densitométricas.
5. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones anteriores, caracterizado porque los objetos comprenden tramas de material conocido situadas en proximidad que permiten filtrar parte del espectro de rayos X y obtener en una misma imagen radiológica regiones de pixeles moduladas en energía.
6. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque el al menos un sistema radiológico comprende una fuente de radiación de rayos gamma.
7. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende un sistema de imagen registrada que permite incorporar información de textura a la superficie de los objetos.
8. Dispositivo de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones anteriores, caracterizado porque la fuente de radiación comprende un acelerador de radioterapia.
9. Dispositivo de obtención de imágenes densitométricas, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende al menos una imagen visible registrada para aplicar a la superficie de los objetos de información de su textura.
10. Procedimiento de obtención de imágenes densitométricas de al menos un objeto mediante combinación de imagen radiológica y cámaras de profundidad, que se lleva a cabo mediante el sistema descrito en una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende las siguientes fases:
• adquirir la al menos una imagen radiológica registrada mediante el al menos un sistema radiológico;
• generar la reconstrucción tridimensional del al menos un objeto a partir del conjunto de imágenes de profundidad registrada adquiridas mediante el sistema de captura de imágenes de profundidad;
• calcular, para cada uno de los pixeles de la al menos una imagen radiológica, una recta en el espacio que representa dicho pixel;
• calcular un punto de entrada y un punto de salida correspondientes a unos puntos de intersección de cada una de las rectas obtenidas para cada pixel de la al menos una imagen radiológica con la superficie de la reconstrucción tridimensional del al menos un objeto;
• calcular una longitud de un segmento que une los puntos de entrada y salida en la reconstrucción tridimensional;,
• combinar, para cada pixel de la imagen radiológica, información de la longitud del segmento calculado con la información obtenida de la superficie de la reconstrucción tridimensional del al menos un objeto.
11. Procedimiento de obtención de imágenes densitométricas, según la reivindicación 10, caracterizado por que al menos uno de los sensores cambia su posición relativa respecto al resto de componentes del sistema manteniendo el registro.
12. Procedimiento de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones 10 o 11, caracterizado por que al menos uno de los sistemas radiológicos cambia su posición relativa respecto al resto del sistema manteniendo el registro.
13. Procedimiento de obtención de imágenes densitométricas, según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende combinar la imagen visible de los objetos con la imagen en tres dimensiones de los sensores de profundidad obteniendo imágenes con textura.
14. Uso del sistema y el procedimiento descrito en una cualquiera de las reivindicaciones anteriores en sistemas seleccionados entre:
• sistemas de tomografía axial;
• sistemas de micro-tomografía;
• sistemas de espectrometría de fluorescencia;
• sistemas de espectrometría de micro-fluorescencia de rayos X;
• sistemas de espectrometría vibracional;
• sistemas de espectroscopía del infrarrojo cercano;
• sistemas con cámaras multiespectrales;
• sistemas con cámaras hiperespectrales;
• aceleradores de radioterapia;
• sistemas de visualización;
• sistemas de control de calidad;
• sistemas de inspección de alimentos, productos y construcciones mecánicas;
• sistemas de corrección de dispersión lateral;
• sistemas de inspección de piezas mecánicas; y,
• sistemas de ayuda a sistemas de diagnóstico.
FIG. 7
Patentes similares o relacionadas:
Método para representar imágenes en color, del 8 de Julio de 2020, de E Ink Corporation: Un método para representar una imagen en una pantalla que tiene una pluralidad de píxeles, cada uno de los cuales es capaz de visualizar uno cualquiera de una pluralidad […]
VISOR DE IMÁGENES, del 8 de Julio de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Se describen un visor de imágenes y un método para utilizar el mismo en un sistema de gestión de imágenes médicas. En una realización, el sistema comprende: […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Tubería de sombreadores con canales de datos compartidos, del 24 de Junio de 2020, de QUALCOMM INCORPORATED: Un procedimiento de procesamiento gráfico que comprende: asignar, por una unidad de procesamiento gráfico (GPU), una memoria intermedia cíclica […]
 Dispositivo de seguridad para proyectar una colección de imágenes sintéticas, del 24 de Junio de 2020, de VISUAL PHYSICS, LLC: Un dispositivo de seguridad para proyectar una colección de imágenes sintéticas, que comprende: una colección de elementos de enfoque, teniendo […]
Dispositivo de seguridad para proyectar una colección de imágenes sintéticas, del 24 de Junio de 2020, de VISUAL PHYSICS, LLC: Un dispositivo de seguridad para proyectar una colección de imágenes sintéticas, que comprende: una colección de elementos de enfoque, teniendo […]
Método y sistema de imagen 3D, del 10 de Junio de 2020, de COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Un sistema para generar un modelo tridimensional de un objeto, el sistema que incluye: un dispositivo de formación de imágenes de mano portátil […]
MÉTODO PARA LA OBTENCIÓN DE UN MODELO FÍSICO DE UN OBJETO TRIDIMENSIONAL A PARTIR DE SUPERFICIES DESARROLLABLES Y MODELO FÍSICO ASÍ OBTENIDO, del 2 de Abril de 2020, de UNIVERSIDAD NACIONAL DE COLOMBIA: La presente invención se relaciona con un método para obtener un modelo físico de un objeto tridimensional a partir de un modelo digital de […]
Renderización híbrida en procesamiento de gráficos, del 1 de Abril de 2020, de QUALCOMM INCORPORATED: Un procedimiento de procesamiento de gráficos, comprendiendo el procedimiento: realizar, con una unidad de procesamiento de gráficos (GPU), un pase de fragmento […]