DISPOSITIVO POSICIONADOR PARA MICROSCOPIOS OPERABLE EN ENTORNOS CRIOGÉNICOS.
La presente invención proporciona un dispositivo posicionador que presenta una alta estabilidad mecánica por lo que puede ser incorporado en un microscopio de sonda local,
siendo operable en entornos criogénicos, en especial a bajas temperaturas, a muy bajas temperaturas, y a temperaturas menores que 100 mK, y adicionalmente en presencia de altos campos magnéticos. El dispositivo comprende una base solidaria del microscopio de sonda local, un portamuestras, unos medios de guiado entre la base y el portamuestras y un actuador situado fuera del recinto de bajas temperaturas. Unos medios de transmisión de fuerza aislantes térmicamente transmiten el impulso del actuador al portamuestras. La fricción entre la base y el portamuestras está minimizada al máximo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031456.
Solicitante: UNIVERSIDAD AUTONOMA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: BUENDIA ALMANSA, ANDRES, SUDEROW RODRIGUEZ,HERMANN, VIEIRA DIAZ,SEBASTIAN, GUILLAMÓN GÓMEZ,Isabel, PAZOS ABREU,Manuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01Q10/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01Q TECNICAS O APARATOS DE SONDA DE BARRIDO; APLICACIONES DE TECNICAS DE SONDA DE BARRIDO, p. ej. MICROSCOPIA POR SONDA DE BARRIDO [SMP]. › Disposiciones para barrido o posicionamiento, es decir, disposiciones para controlar de forma activa el movimiento o posición de la sonda.
- G01Q30/10 G01Q […] › G01Q 30/00 Medios auxiliares destinados a asistir o mejorar las técnicas o aparatos de sonda de barrido, p. ej. dispositivos de visualización o de procesamiento de datos. › Condiciones térmicas.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención proporciona un dispositivo posicionador que presen-ta una alta estabilidad mecánica por lo que puede ser incorporado en un microscopio de sonda local, siendo operable en entornos criogénicos, en especial a bajas tempera-turas, a muy bajas temperaturas, y a temperaturas menores que 100 mK y en presen-cia de altos campos magnéticos.
ANTECEDENTES DE LA INVENCIÓN
Los dispositivos de posicionamiento son especialmente útiles en aquellas aplicaciones que requieren la manipulación espacial de objetos en entornos donde el acceso a los componentes no es posible o deseable.
Cuando estos dispositivos se implementan en entornos que se encuentran a muy baja presión (alto vacío p < 10-6 mbar, ultra alto vacío p < 10-9 mbar, vacío criogénico) , con altos campos magnéticos (H-1-20 T) o en entornos criogénicos -especialmente a bajas temperaturas (T < 4.2 K) y muy bajas temperaturas (T < 1.2 K) -, se plantean restricciones propias de la adaptación en dichos entornos extremos, y los dispositivos deben adaptarse para superar los problemas específicos de los mismos. En adelante se denominarán como "temperaturas criogénicas" a aquellas temperaturas por debajo de 10 K y que comprenden los rangos de bajas temperaturas, muy bajas temperaturas y temperaturas por debajo de 100 mK.
Además, es necesario tener en cuenta condicionantes adicionales en aque-llos dispositivos que son útiles para su aplicación en el campo de las microscopías de barrido de sonda local (del inglés "Scanning Probe Microscopy", SPM) , como la micros-copía de efecto túnel (del inglés "Scanning Tunneling Microscopy", STM) , la familia de microscopías de fuerzas atómicas (del inglés "Atomic Force Microscopy", AFM) o las microscopías de campo óptico cercano (del inglés "Scanning Near-field Optical Micras-copy'', SNOM) . Estas técnicas de microscopía se emplean para estudiar y caracterizar muestras utilizando la información proporcionada por la interacción local entre una sonda y una muestra. A modo de ejemplo, en una implementación típica de un STM la sonda es una punta metálica y la muestra es una superficie conductora. Dependiendo de los requerimientos de la muestra a estudiar, es necesario adaptar estos instrumen-tos para que tengan una estabilidad mecánica alta. Así, aplicaciones como la topografía de superficies con resolución atómica necesitan conseguir típicamente medidas con precisión de picometros.
El tamaño de la región que puede ser estudiada con estos microscopios está limitado por el desplazamiento lateral máximo de la sonda respecto a la muestra que permite el sistema de barrido (típicamente del orden de las micras) . Esta región pequeña, en adelante "región de observación", comprende una zona de estudio cuya superficie varía desde la escala atómica (-10-20 m2) hasta el rango de los micrómetros (-10-12 2
m ) dependiendo de la implementación particular de la técnica. Para realizar este movimiento se utiliza un actuador que permite mover la sonda con respecto a la muestra, generalmente realizando un barrido. A este actuador se le suele designar con el término del inglés "scanner". Dicho actuador de barrido o scanner se suele imple-mentar mediante tubos de material piezoeléctrico adaptados para proporcionar mo-vimiento en las tres direcciones espaciales, conocidos comúnmente como "piezotubos".
Se presenta por tanto la necesidad de proporcionar un dispositivo posicio-nador que pueda ser adaptado para posicionar una o varias muestras a distancias sufi-cientemente grandes tal que permitan desplazar dichas muestras dentro de la región de observación de un microscopio. Para ello, los dispositivos de posicionamiento de-ben ofrecernos la posibilidad de realizar trayectos del orden de mm con al menos pre-cisión sub-micrométrica, alta estabilidad mecánica y posibilidad de manejo a distancia.
En el estado de la técnica es posible encontrar dispositivos de posiciona-miento basados en motores piezoeléctricos. Podemos distinguir aquellas enseñanzas técnicas dirigidas a motores piezoeléctricos que mueven una pieza u objeto móvil pe-queño, tal como un portamuestras, basándose en la inercia del mismo. En estos siste-mas el objeto móvil pequeño se desplaza respecto a su actuador cuando a éste se le suministra un voltaje que varía con el tiempo en dos fases. En una primera fase el pie-zoeléctrico se deforma una distancia a un ritmo suficientemente lento arrastrando al objeto móvil con el actuador gracias a la fuerza de fricción (estática) entre el actuador y el objeto móvil. A continuación, en un segunda fase, el actuador invierte el sentido del movimiento para retrotraerse de una manera suficientemente rápida como paraque el objeto móvil se deslice con respecto al actuador. Repitiendo esta secuencia es
posible desplazar objetos pequeños. En estos sistemas es crítico el ajuste de la fuerza
de fricción entre el actuador y objeto móvil. Es importante que la fuerza de fricción
estática sea significativamente menor que la fuerza de fricción dinámica en el rango de
5 frecuencias en el que se retrotrae el actuador. El uso de lubricantes, junto la elección
de una relación de masas entre el objeto móvil y el actuador, son aspectos claves para
construir un sistema operativo. Además, estos dispositivos pueden dar lugar a unta-
maño de paso que no sea fácilmente reproducible, al depender de varios parámetros
como la masa, la forma de la superficie o la orientación del peso y del plano de frie-
lO ción.
Los motores piezoeléctricos de pasos (conocidos por el término del inglés
"stepper") son capaces de trasladar objetos pequeños realizando una pluralidad de
pasos. Este tipo de motores de pasos son operables en entornos como los anterior-
15 mente citados, siendo posible implementar sistemas de posicionamiento adecuados
para su uso en microscopías de sonda local.
Mediante un conjunto de actuadores piezoeléctricos es posible mover la
pieza u objeto móvil de pequeño tamaño. Para ello un conjunto de actuadores se dis-
20 ponen en contacto con el objeto móvil de pequeño tamaño. Cada actuador está ali-
mentado por una señal eléctrica siendo posible deformar cada actuador piezoeléctrico
individualmente. De esta forma, la deformación de cada actuador permite implemen-
tar movimientos colectivos y movimientos individuales. Durante el movimiento colec-
tivo se mueven todos los actuadores a una velocidad suficientemente lenta como para
25 que el objeto móvil se desplace con ellos debido a que la relación entre la fricción y la
inercia permite que no se produzca deslizamiento entre el objeto móvil y el actuador.
Durante el movimiento individual un actuador o grupo de actuadores realizan un mo-
vimiento suficientemente rápido en el que el objeto móvil de pequeño tamaño se des-
liza con respecto a cada actuador o grupo de actuadores. Cada actuador o grupo de
30 actuadores actúa individualmente mientras que el resto permanecen estáticos propor-
cionando una oposición debido a la fricción estática entre el objeto móvil y el resto de
actuadores.
Otros motores que utilizan piezoeléctricos conocidos como "lnchworms"
35 utilizan un elemento piezoeléctrico cilíndrico. Estos motores se basan en una secuencia
de pasos que comprende la contracción de un elemento piezoeléctrico cilíndrico para
atrapar un objeto móvil, generalmente situado de forma coaxial. En un paso siguientese induce una deformación axial en el elemento piezoeléctrico cilíndrico paralela a su generatriz que traslada al objeto móvil una distancia en la dirección de la generatriz. A continuación, se produce una deformación axial que aumenta el diámetro del elemen-to piezoeléctrico cilíndrico que permite soltar el objeto móvil. Al realizar esta secuencia de pasos es posible mover dicho objeto de forma reproducible a lo largo de una direc-ción paralela a la generatriz del piezotubo.
Todos estos motores se basan en la deformación de un elemento piezo-eléctrico. Sin embargo, los elementos piezoeléctricos presentan pérdidas, intrínsecas a los materiales piezoeléctricos. Estas pérdidas son mayores en las cerámicas piezoeléc-tricas, que son los materiales que mayor valor tecnológico presentan a priori para im-plementar un dispositivo posicionador ya que tienen un mayor valor de coeficiente piezoeléctrico, y por tanto son capaces de proporcionar el mayor rango de desplaza-mientos.
Las pérdidas más relevantes para un actuador se producen al aplicar un campo eléctrico dentro del piezoeléctrico para provocar una deformación del mismo. Estas pérdidas se traducen en una disipación de energía en forma...
Reivindicaciones:
1. Dispositivo posicionador (1) para microscopios de sonda local (2) , ope-rable a temperaturas criogénicas, para posicionar una muestra (3) en una región de observación (2.2) que comprende:
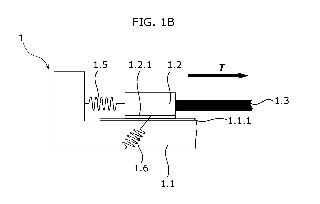
• una base (1.1) adaptada para unirse de forma solidaria al_microscopio de sonda local (2) ;
• un portamuestras (1.2) ;
• unos medios de guiado entre la base (1.1) y el portamuestras (1.2) que com-prenden una primera superficie (1.1.1) de fricción dispuesta en la base (1.1) y una segunda superficie (1.2.1) de fricción dispuesta en el portamuestras (1.2) , de tal modo que dicha segunda superficie (1.2.1) de fricción está adaptada para desplazarse por deslizamiento sobre la primera superficie (1.1.1) de fricción de la base (1.1) ; y
• un actuador (1.4) para la impulsión del portamuestras (1.2) respecto de la ba-se (1.1) ;
donde la base (1.1) y el portamuestras (1.2) se encuentran en el interior de una carcasa (5.12) de muy bajas temperaturas y en contacto térmico con un elemento de termalización, caracterizado porque el actuador (1.4) se encuentra situado fuera de la carcasa (5.12) de muy bajas temperaturas, estando dicho actuador (1.4) vinculado al portamuestras (1.2) mediante unos medios de transmisión (1.3) de fuerza que están comprendidos en el dispositivo posicionador (1) , de tal modo que el actuador (1.4) impulsa el portamuestras (1.2) a través de los medios de transmisión (1.3) de fuerza, siendo dichos medios de transmisión (1.3) de fuerza de baja conductividad térmica.
2. Dispositivo según la reivindicación 1 caracterizado porque los me-dios (1.3) de transmisión de fuerza son de tracción, y por disponer, adicionalmente, de unos primeros medios elásticos (1.5) de tal modo que los medios de transmisión (1.3) de fuerza y dichos primeros medios elásticos (1.5) están adaptados para operar en oposición.
3. Dispositivo según las reivindicaciones 1 o 2 caracterizado porque com-prende unos segundos medios elásticos (1.6) adaptados para mantener el contacto bajo presión entre la primera superficie (1.1.1) de fricción y la segunda superfi-cie (1.2.1) de fricción.
4. Dispositivo según las reivindicaciones 1 a 3 caracterizado porque la pri-mera superficie (1.1.1) de fricción, la segunda superficie (1.2.1) de fricción o una com-binación de las mismas están recubiertas por un lubricante sólido.
5. Dispositivo según cualquiera de las reivindicaciones 1 a 4 caracterizado porque la frecuencia fundamental de resonancia del dispositivo posicionador (1) es mayor que 10kHz para mejorar la estabilidad mecánica y aumentar la precisión en la posición de la muestra (3) .
6. Dispositivo según cualquiera de las reivindicaciones 1 a 5 caracterizado porque el cuerpo de la base (1.1) o el cuerpo del portamuestras (1.2) está hecho de titanio o aluminio.
7. Dispositivo según cualquiera de las reivindicaciones 1 a 6 caracterizado porque el actuador (1.4) es un actuador lineal.
8. Dispositivo según cualquiera de las reivindicaciones 1 a 7 caracterizado porque la primera superficie de fricción (1.1.1) o la segunda superficie (1.2.1) de fric-ción están recubiertas de alúmina.
9. Dispositivo según cualquiera de las reivindicaciones 1 a 8 caracterizado porque los medios de guiado están configurados para formar un carril (1.1.2) que per-mite el desplazamiento lineal.
10. Dispositivo según la reivindicación 9 caracterizado porque la primera superficie (1.1.1) de fricción y la segunda superficie de fricción (1.1.2) son planas.
11. Microscopio de sonda local (2) con capacidad de operar a temperatu-ras criogénicas, que comprende un dispositivo posicionador (1) de acuerdo a cualquie-ra de las reivindicaciones anteriores 1 a 10.
Patentes similares o relacionadas:
PROCESO POR MEDIO DE MICROSCOPÍA DE FUERZA ATÓMICA PARA EL ANÁLISIS MASIVO FÍSICO Y MECÁNICO EN MATERIALES, ARREGLOS DE BIOMATERIALES Y ESTRUCTURAS, del 13 de Junio de 2019, de INSTITUTO POLITÉCNICO NACIONAL: La presente invención se refiere a un proceso implementado por computadora que consiste en etapas de fijado preciso, manipulación y mediciones masivas por microscopía […]
Procedimiento para examinar una muestra mediante microscopía de efecto túnel con aplicación de un medio de contraste, del 6 de Marzo de 2019, de FORSCHUNGSZENTRUM JULICH GMBH: Procedimiento para examinar una muestra con un microscopio de efecto túnel, en el que en al menos un lugar en la punta del microscopio de efecto […]