DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES.
Dispositivo portable autónomo (1), en especial aplicable en cirugía,
manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable de forma extraíble a una carcasa principal (3), y medios de accionamiento para manipular la micro-herramienta de trabajo (2) asociados a servomotores, cuyos medios de accionamiento comprenden un primer actuador asociado a un primer servomotor (4) permitiendo un grado de libertad rotacional de la micro-herramienta de trabajo (2); un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador para un desplazamiento de translación de la micro-herramienta de trabajo hacia delante-detrás; y un tercer actuador (6) asociado a un tercer servomotor que realiza un movimiento oscilante de la micro-herramienta de trabajo respecto al eje longitudinal del primer y segundo actuador. El primer, segundo y tercer actuador están asociados a una unidad de control (7) para determinar el posicionamiento de la micro-herramienta de trabajo en el espacio.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031876.
Solicitante: HERNANDEZ JUANPERA, Jesus.
Nacionalidad solicitante: España.
Inventor/es: HERNANDEZ JUANPERA,Jesus.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B25J7/00 B25J […] › Micromanipuladores.
Fragmento de la descripción:
Dispositivo portable autonomo, en especial aplicable en cirugia, manipulacion de micro-componentes y similares.
OBJETO DE LA INVENCION
La presente solicitud de patente de invencion tiene por objeto el registro de u n dispositivo portable autonomo que incorpora notables innovaciones y ventajas.
Mas concretamente, la invencion propone el desarrollo de un dispositivo portable autonomo, en especial aplicable en cirugia, manipulacion de micro-componentes y similares, del tipo que comprende una micro-herramienta de trabajo acoplable de forma extraible a una carcasa principal, y medios de accionamiento para la manipulacion de la herramienta de t rabajo asociados a servomotores que permite un facil manejo y una amplia libertad de movimientos de la micro-herramienta durante su utilizacion. El hecho de que sea extraible facilita las operaciones para su limpieza y esterilizacion.
ANTECEDENTES DE LA INVENCION
Es bien conocido en el estado de la tecnica brazos robot que presentan acoplado en su extremo libre una herramienta de trabajo que permite la manipulacion de objetos o piezas de reducidas dimensiones para la creacion de conjuntos o dispositivos, sin embargo este tipo de robots presenta un punto de referencia o base fijada por lo que limita su utilizacion al punto donde esta emplazado dicho brazo robot.
Ademas, el solicitante no tiene conocimiento de la existencia de una invencion que disponga de todas las caracteristicas que se describen en esta memoria, que permita aplicar la precision de trabajo de un brazo de robot a un instrumento manejable manualmente por un usuario.
DESCRIPCION DE LA INVENCION
La presente invencion se ha desarrollado con el fin de proporcionar un dispositivo portable autonomo que resuelva los inconvenientes anteriormente mencionados, aportando, ademas, otras ventajas adicionales que seran evidentes a partir de la descripcion que se acompafa a continuacion.
Es por lo tanto un objeto de la presente invencion proporcionar un dispositivo portable autonomo, en especial aplicable en cirugia, del tipo que comprende una micro-herramienta de trabajo acoplable de forma extraible a una carcasa principal, y medios de accionamiento para la manipulacion de la herramienta de trabajo asociados a servomotores, que permite trabajar al manipulador o usuario de una forma sencilla y completamente autonoma, con una gran precision en lo que respecta a la posicion espacial del dispositivo electronico de esta invencion durante su utilizacion. La manipulacion de este dispositivo puede ser la misma que si sujetase un utensilio de escritura.
Este dispositivo puede resultar particularmente util en a plicaciones de microcirugia, micro-ensamblaje, preparacion de aplicaciones dentales, micromanipulacion de estructuras biologicas.
Es por lo tanto un objeto de la presente invencion proporcionar un dispositivo portable autonomo, en especial aplicable en cirugia, que comprende una micro-herramienta de trabajo acoplable de forma extraible a una carcasa principal, y medios de accionamiento para la manipulacion de la herramienta de trabajo asociados a servomotores, que per mite trabajar al manipulador o us uario de un a forma sencilla y con gran precision de l a posicion espacial durante su utilizacion.
Mas en particular, Los medios de accionamiento comprenden un primer actuador asociado a un primer servomotor que permite un grado de libertad rotacional libre de la micro-herramienta de trabajo respecto a un eje que sobresale del primer servomotor; un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador apto para un desplazamiento de translacion de la micro-herramienta de trabajo hacia delante-atras; y un tercer actuador asociado a un tercer servomotor apto para realizar un movimiento oscilante de la micro-herramienta de trabajo respecto al eje longitudinal del primer y segundo actuador; estando el primer, segundo y tercer actuador asociados a una unidad de control alojada en la carcasa principal capaz de determinar el posicionamiento de la micro-herramienta de trabajo en el espacio; y en el que los medios de accionamiento estan alimentados de forma autonoma por al menos una bateria.
Segun otro aspecto de la invencion, la unidad de control puede incluir un detector giroscopico asociado al microprocesador que permite estabilizar la posicion de la micro-herramienta en los tres ejes de coordenadas, amortiguando o eliminando cualquier movimiento minimo no deseado o temblor de la mano del usuario al realizar un trabajo manual con el dispositivo.
En una realizacion preferida, la unidad de control incluye un detector de movimiento asociado al microprocesador para la deteccion de posicionamiento y aceleracion en los tres ejes de coordenadas. Mediante esta aplicacion, se preve evitar al usuario tener que dejar de sujetar el dispositivo para realizar u ordenar diferentes acciones. Asi, el dispositivo de la invencion puede con exactitud, posicionarse en una posicion definida espacialmente y volver a repetirla indefinidamente pudiendo programar areas limites donde a traves del display o por indicaciones acusticas o de voz el usuario puede situar la micro-herramienta de trabajo en una correcta posicion espacial.
De acuerdo con otra caracteristica, la unidad de control puede incluir un control de reconocimiento de voz o incluso mediante gestos de la mufeca para introducir ordenes al microprocesador.
Ventajosamente, el microprocesador de l a unidad de co ntrol puede incluir una unidad logica aritmetica capaz de determinar en tiempo real los valores de posicionamiento correctivos a aplicar respecto a la posicion espacial de la micro-herramienta de trabajo en un instante determinado.
Otras realizaciones particulares del dispositivo de la invencion se describen en las reivindicaciones dependientes adjuntas.
Otras caracteristicas y ventajas del dispositivo portable autonomo objeto de la presente invencion resultaran evidentes a partir de la descripcion de una realizacion preferida, pero no exclusiva, que se ilustra a modo de ejemplo no limitativo en los dibujos que se acompafan, en los cuales:
BREVE DESCRIPCION DE LOS DIBUJOS
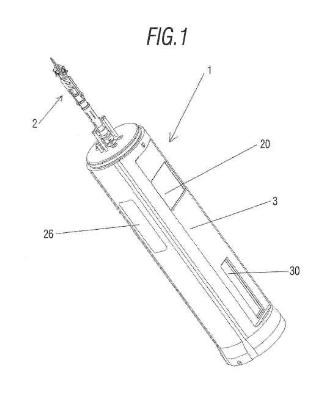
Figura 1. - Es una vista en perspectiva del dispositivoportable autonomo de acuerdo con la presente invencion;
Figura 2. Es una vista en perspectiva de detalle de los medios de accionamiento provistos en el dispositivo portable de la invencion;
Figura 3. Es una vista en perspectiva del dispositivo portable con la micro-herramienta en el que se ha extraido la carcasa principal;
Figura 4. Es una vista de detalle en perspectiva de una de las articulaciones asociada al portaherramientas y al elemento de union;
Figura 5. Es una vista en perspectiva del dispositivo portable con la micro-herramienta en el que se ha extraido la carcasa principal y la unidad de control;
Figuras 6A-6F. Muestran vistas en alzado de diferentes realizaciones de la micro-herramienta;
Figura 7. Es una vista esquematizada en planta superior de la unidad de control que gestiona el dispositivo de la invencion;
Figura 8. Es un vista esquematizada en planta inferior de la unidad de control;
Figuras 9A y 98. Son una vista en alzado y en planta, respectivamente del interior del dispositivo de la invencion donde se han extraido algunos elementos para facilitar su comprension;
Figura 10. Es una vista en perspectiva del tramo donde se alojala micro-herramienta en una posicion con la pinza abierta;
Figura 11. Es una vista en perspectiva del tramo donde se aloja micro-herramienta la cual esta inclinada; y Figura 12. Es una vista en perspectiva del dispositivo portable provisto con un tapon protector.
DESCRIPCION DE UNA REALIZACION PREFERENTE
Tal como se muestra en las figuras adjuntas, un dispositivo portable autonomo segun una realizacion de la invencion, indicado de forma general con la referencia 1, resulta especialmente adecuado para el campo de la cirugia y manipulacion de micro-piezas, comprende esencialmente una micro-herramienta de trabajo 2 acoplable de forma extraible a una carcasa principal 3 conformada por un cuerpo de mano sensiblemente cilindrico e interiormente hueco, y unos medios de accionamiento para la manipulacion de la herramienta de trabajo asociados a una serie de servomotores que se describen seguidamente.
Los medios de accionamiento comprenden un primer actuador asociado a un primer servomotor 4 que permite un grado de libertad rotacional...
Reivindicaciones:
1. Dispositivo portable autonomo (1) , en especial aplicable en cirugia, manipulacion de micro-componentes y si milares, q ue co mprende una m icro-herramienta de t rabajo ( 2) acoplable de f orma e xtraible a un a ca rcasa principal (3) , y medios de accionamiento para la manipulacion de la micro-herramienta de trabajo (2) asociados a servomotores, caracterizado por el hecho de que:
Los medios de accionamiento comprenden un primer actuador asociado a un pr imer servomotor (4) que permite un grado de libertad rotacional libre de la micro-herramienta de trabajo (2) respecto a un eje (5) que sobresale del primer servomotor (4) ; un s egundo actuador asociado al menos a un segundo servomotor (36) , vinculado al primer actuador apto para un desplazamiento de translacion de la micro-herramienta de trabajo hacia delante-detras; y un tercer actuador (6) asociado a un tercer servomotor apto para realizar un movimiento oscilante de la micro-herramienta de trabajo (2) respecto al eje longitudinal del primer y segundo actuador;
estando el primer, segundo y tercer actuador asociados a una unidad de control (7) alojada en la carcasa principal (3) capaz de determinar el posicionamiento de la micro-herramienta de trabajo (2) en el espacio; y en el que los medios de accionamiento estan alimentados de forma autonoma por al menos una bateria (8) .
2. D ispositivo portable a utonomo ( 1) se gun l a r eivindicacion 1, ca racterizado p or el hech o de q ue el segundo actuador comprende cuerpos tubulares extensibles telescopicamente entre si, por cuyo interior trascurre el eje (5) del primer actuador, en el que cada cuerpo tubular esta vinculado a un servomotor independiente y en que se proporcionan medios de guiado para el movimiento rotacional de la micro-herramienta de trabajo (2) .
3. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la microherramienta de trabajo (2) esta unida a un elemento de union (13) que esta fijado con el eje (5) del primer actuador.
4. Dispositivo portable autonomo (1) segun las reivindicaciones 2 y 3, caracterizado por el hecho de que los medios de guiado consisten en acanaladuras (14) provistas en cada uno de los cuerpos tubulares (10, 11, 12) en las cuales se insertan tramos de guia dispuestos en el elemento de union (13) desplazables a lo largo de todo el diametro de los cuerpos tubulares.
5. Dispositivo portable autonomo (1) segun la reivindicacion 4, caracterizado por el hecho de que los tramos de guia consisten en elementos en forma de "L" (15) cuyo extremo encajan en sendas acanaladuras (14) .
6. Dispositivo portable autonomo (1) segun la reivindicaciones 1 y 3, caracterizado por el hecho de que el tercer actuador comprende un par de articulaciones (18) que estan por un extremo unidas al elemento de union (13) y por el extremo opuesto esta vinculado a la micro-herramienta de trabajo (2) .
7. Dispositivo portable autonomo (1) segun la reivindicacion 6, caracterizado por el hecho de que el par de articulaciones (18) esta vinculado a la micro-herramienta de trabajo (2) a traves de un porta-herramientas que presenta medios de fijacion para sujetar la micro-herramienta de trabajo (2) .
8. Dispositivo portable autonomo (1) segun la reivindicacion 7, caracterizado por el hecho de que los medios de fijacion consisten en un orificio a traves del cual para un tornillo.
9. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) presenta una placa de soporte (21) que esta fijada en el interior de la carcasa principal (3) .
10. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) presenta un microprocesador (22) provisto de una memoria programable y electronica asociada.
11. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de co ntrol ( 7) i ncluye un d etector de m ovimiento ( 23) asociado al m icroprocesador ( 22) par a l a det eccion d el posicionamiento y aceleracion en los tres ejes de coordenadas.
12. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) incluye un detector giroscopico asociado al microprocesador (22) para estabilizar la posicion de la micro-herramienta de trabajo (2) en los tres ejes de coordenadas.
13. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) incluye un detector magneticoterrestre (25) en los tres ejesde coordenadas X, Y y Z asociado al microprocesador (22) para la deteccion de la posicion espacial en tiempo real.
14. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) presenta una conexion externa para el acoplamiento de un dispositivo electronico externo.
15. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que los medios de accionamiento comprenden al menos un pulsador (26) ubicado en la cara exterior de la carcasa principal.
16. Dispositivo portable autonomo (1) segun la reivindicacion 15, caracterizado por el hecho de que el pulsador (26) es del tipo provisto de un detector de presion tactil.
17. Dispositivo portable autonomo (1) segun las reivindicacion 1 y 6, caracterizado por el hecho de que la micro-herramienta de t rabajo ( 2) est a co mprendida por una p inza pr ovista de dos elementos de agar re ( 27) enfrentados entre si, estando cada uno de los elementos de agarre (27) asociado a una articulacion (18) del tercer actuador.
18. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que los servomotores de los actuadores estan acoplados en una estructura que sobresale de la carcasa principal (3) , de tal manera que al desplazar el cuerpo tubular se desplaza dicha estructura, estando los elementos tubulares de la estructura fijados a los respectivos cuerpos tubulares mediante unas extensiones que sobresalen diametralmente.
19. dispositivo portable autonomo (1) segun la reivindicacion 17, caracterizado por el hecho de que cada uno de los elementos de agarre (27) esta vinculado a un respectivo servomotor secundario (39, 42) para llevar a cabo m ovimientos independientes entre si r especto a ca da el emento d e a garre ( 27) , cu yos servomotores secundarios (39, 42) actuan con independencia de los primer, segundo y tercer actuador.
20. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por elhecho de que la carcasa principal (3) incluye un display (30) que visualiza datos asociados con los parametros regulados por la unidad de control (7) , tales como los datos de coordenadas de posicionamiento espacial e inclinacion de la microherramienta de trabajo en tiempo real.
21. D ispositivo por table autonomo ( 1) se gun la r eivindicacion 1, ca racterizado p or el hecho de qu e comprende medios de indicacion del estado de funcionamiento asociados con un interruptor on/off.
22. Dispositivo portable autonomo (1) segun la reivindicacion 21, caracterizado por el hecho de que los medios de indicacion consisten en una fuente luminosa de tipo led (9) asociada a los medios de alimentacion.
23. D ispositivo por table a utonomo ( 1) se gun l a r eivindicacion 14, c aracterizado p or el hecho de qu e comprende una conexion externa consiste en un puerto US8 (17) .
24. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que la unidad de control (7) comprende un navegador de posicionamiento y menu del display provisto de un joystick (20) de tipo tactil situado en la carcasa principal (3) .
25. Dispositivo portable autonomo (1) segun la reivindicacion 10, caracterizado por el hecho de que la unidad de control (7) incluye un control de reconocimiento de voz para introducir ordenes al microprocesador (22) .
26. Dispositivo portableautonomo (1) segun la reivindicacion 1, caracterizado por elhecho de que se proporciona un dispositivo electro-magnetico para polarizar la micro-herramienta de trabajo (2) con un valor de signo positivo o negativo susceptible de ser regulado.
27. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de que cada uno de los primer, segundo y tercer actuador comprenden un dispositivo de deteccion resistivo para permitir el control de la fuerza aplicada por la micro-herramienta de trabajo (2) sobre una pieza u objeto a manipular, siendo dicho dispositivo de deteccion resistiva apto para trabajar entre un intervalo maximoyunintervalo minimo de valor de fuerza.
28. Dispositivo portable autonomo (1) segun la reivindicacion 10, caracterizado por el hecho de que el microprocesador ( 22) i ncluye una u nidad l ogica ar itmetica ca paz de determinar en t iempo r eal l os valores de posicionamiento correctivos a aplicar respecto a la posicion espacial de la micro-herramienta de trabajo (2) en un instante determinado.
29. Dispositivo portable autonomo (1) segun las reivindicaciones 11, 12, 13 y 20, caracterizado por el hecho de que los parametros de posicionamiento espacial de la micro-herramienta de trabajo obtenidos a partir del detector giroscopico, d etector d e m ovimiento y detector m agnetico t errestre so n vi sualizables gr aficamente m ediante e l display (30) .
30. D ispositivo por table autonomo ( 1) se gun la r eivindicacion 1, ca racterizado p or el hecho de qu e comprende un tapon protector (41) acoplable con la carcasa principal (3) que cubre los medios de accionamiento que sobresalen del exterior de la carcasa principal (3) y la propia micro-herramienta de trabajo (2) .
31. Dispositivo portable autonomo (1) segun la reivindicacion 1, caracterizado por el hecho de quedicha unidad de control (7) esta provista de medios sin cable para la transmision/recepcion de sefales desde al menos un dispositivo externo que trabaja en una red de comunicacion.
Patentes similares o relacionadas:
Mecanismo de sincronización para mordazas de pinza, del 1 de Julio de 2020, de PHD, INC.: Un dispositivo para agarrar un objeto, que comprende: un cuerpo principal que tiene una primera y una segunda placa terminal (12A, 12B); una placa base que […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Abrazadera con mecanismo multiplicador de fuerza, del 29 de Abril de 2020, de PHD, INC.: Una abrazadera accionada por fluido , , especialmente una abrazadera neumática accionada por fluido para sujetar una pieza de trabajo , comprendiendo […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Método para el manejo de pilas de sustratos flexibles, del 7 de Agosto de 2019, de Yaskawa Nordic AB: Método para manejar pilas de sustratos flexibles por medio de una pinza , la pinza que está dispuesta en un brazo de un robot y que tiene un dedo […]
Pinza de satélites, del 12 de Junio de 2019, de Przemyslowy Instytut Automatyki i Pomiarow PIAP: Una pinza para satélites que consta de una base a la que se acopla con bisagra, como mínimo, un dedo móvil , que consta, como mínimo, de dos falanges […]
Dispositivo de soporte y agarre, en particular para líneas de llenado y/o cierre de recipientes, del 15 de Mayo de 2019, de RONCHI MARIO S.P A.: Dispositivo para soportar y agarrar recipientes (1, 1a), que comprende: - una base que define una superficie superior para soportar un recipiente (1,1a); - […]
Pinzas, del 13 de Marzo de 2019, de Yaskawa Nordic AB: Unas pinzas adaptadas para usarse en un sistema automático para manipular sustratos flexibles proporcionados en una pila , pudiendo disponerse de forma rotatoria […]