DISPOSITIVO Y MÉTODO PARA LA DETECCIÓN DE UNA POSICIÓN DE UNA UNIDAD MOTRIZ.
Dispositivo para la detección de una posición de una unidad motriz,
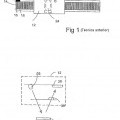
en la cual se puede detectar la posición mediante un transmisor incremental (1) con un primer nivel de precisión descrito mediante un primer incremento angular o de recorrido, y que se puede suministrar para un convertidor (5), mediante el cual el primer nivel de precisión de la detección de la posición se puede reducir a un segundo nivel de precisión descrito mediante un segundo incremento angular o de recorrido, caracterizado porque en el convertidor (5) se implementa un autómata de estado finito, y porque dicho autómata de estado finito puede detectar el estado actual de todas las señales y el estado previo de, al menos, una de las señales de los canales del transmisor incremental (AIN, BIN) y/o de los canales del convertidor (AOUT, BOUT), y en correspondencia con las variaciones de estado que se pueden identificar de esta manera, se puede modificar el estado de los canales del convertidor (AOUT, BOUT), porque las variaciones de estado se pueden clasificar como legales cuando cumplen con los criterios de un código Gray, y se pueden clasificar como ilegales cuando no cumplen con dichos criterios, y porque mediante una variación ilegal del estado se puede iniciar un procedimiento de detección de errores
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07116914.
G01D5/244FISICA. › G01METROLOGIA; ENSAYOS. › G01DMEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
G01D5/245G01D 5/00 […] › utilizando un número variable de pulsos en un tren.
G01D5/249G01D 5/00 […] › utilizando código de pulsos.
G01D5/347G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Dispositivo y método para la detección de una posición de una unidad motriz La presente invención hace referencia a un dispositivo y a un método para la detección de una posición de una unidad motriz, por ejemplo, de una puerta accionada automáticamente o de un asiento de un vehículo a motor. Para el control de motores, en particular para el accionamiento de puertas correderas o levadizas, se emplean generalmente transmisores incrementales, también denominados codificadores de cuadratura, que pueden detectar la velocidad y la posición. Dichos transmisores incrementales se encuentran a disposición en una pluralidad de resoluciones. Por resolución se entiende, por ejemplo, en cuántos incrementos, es decir, cuántos sectores parciales representados mediante señales correspondientes, se divide un recorrido determinado o, en el caso de transmisores incrementales conformados como codificadores rotativos, un ciclo completo recorrido. Los transmisores incrementales con las resoluciones que generalmente se requieren, se encuentran a disposición de manera mayormente económica debido a la producción masiva de piezas. Sin embargo, si se requiere de una resolución poco frecuente, por lo general no se obtienen los transmisores incrementales, o resultan costosos. Para reducir la resolución de un transmisor incremental a una medida deseada, se puede realizar una adaptación mecánica, por ejemplo, mediante un mecanismo, que sin embargo requiere de un espacio mayor y que ocasiona comparativamente costes elevados. De la patente EP 0 340 481 A1 se conoce una evaluación de señales de un transmisor incremental, en la cual se generan, al menos, dos señales tacométricas desfasadas de manera opuesta entre sí, que sólo se cuentan cuando existe una combinación admisible de las señales tacométricas. Para la medición de una velocidad, las señales tacométricas se suministran a los contadores mediante un convertidor y un divisor de frecuencias, en donde se suministra adicionalmente para los contadores una señal de referencia cuya frecuencia puede variar. El objeto de la presente invención consiste en proporcionar un dispositivo económico y un método para la detección de una posición de una puerta accionada automáticamente. El objeto se resuelve, conforme a la presente invención, mediante un dispositivo con las características de la reivindicación 1, y mediante un método con las características de la reivindicación 13. Los acondicionamientos ventajosos de la presente invención son objeto de las reivindicaciones relacionadas. En el dispositivo conforme a la presente invención, para la detección de una posición de una puerta accionada automáticamente, se puede detectar la posición mediante un transmisor incremental con un primer nivel de precisión descrito mediante un primer incremento angular o de recorrido, y se puede suministrar para un convertidor, mediante el cual el primer nivel de precisión de la detección de la posición se puede reducir a un segundo nivel de precisión descrito mediante un segundo incremento angular o de recorrido. Un convertidor de esta clase permite el aprovechamiento de un transmisor incremental disponible que presenta una resolución más precisa que la requerida. La resolución requerida se puede lograr mediante el convertidor. En particular, cuando el transmisor incremental utilizado es un producto masivo económico, el empleo del convertidor puede resultar económico, en comparación con el empleo de un transmisor incremental especial menos difundido. En el caso que ya no se encuentre disponible un transmisor incremental utilizado hasta el momento, dicho transmisor puede ser reemplazado por otro transmisor con costes reducidos mediante el convertidor. Además, en el convertidor se implementa un autómata de estado finito, que se puede realizar tanto con microprocesadores como con componentes discretos de una lógica combinatoria y secuencial. Un autómata de estado finito es un modelo de comportamiento compuesto de estados, transiciones de estados y acciones, cuya cantidad de estados es finita. Un autómata de estado finito considera en sus acciones, por ejemplo, el establecimiento de valores de salida como las señales de los canales del convertidor, tanto un estado anterior de las señales de entrada, que además de los canales del transmisor incremental pueden comprender también los canales del convertidor asignados, así como su variación a un nuevo estado. Un autómata de estado finito de esta clase, también denominado máquina de estado, es una opción particularmente apropiada para convertir la resolución del transmisor incremental mediante el sentido de rotación o el sentido de dirección, sin perder la información. Por otra parte, las variaciones de estado pueden ser clasificadas por el autómata de estado finito, como legales cuando cumplen con los criterios de un código Gray, y como ilegales cuando dichas variaciones no cumplen con dichos criterios. El código Gray es un método de codificación rígido, en el cual en una sucesión de valores binarios se diferencian dos valores binarios sucesivos, siempre por un bit. Una divergencia de dicha regla es un indicio para un error. En la codificación de las señales binarias en los canales del transmisor incremental, siempre se modifica sólo la señal de uno de los canales del transmisor incremental, en un ángulo o un lugar determinado. En el caso que el autómata de estado finito identifique una variación en ambos valores, dicho autómata puede ignorar la transición de estado o bien, puede iniciar un procedimiento de detección de errores. 2 E07116914 25-10-2011 Preferentemente, se pueden emitir señales desde el transmisor incremental a un primer y un segundo canal del transmisor incremental, que representan un respectivo primer incremento angular o de recorrido predeterminado, recorrido por el transmisor incremental. Las señales del segundo canal del transmisor incremental, en comparación con las señales del primer canal del transmisor incremental que presentan la misma forma de señal, presentan un desplazamiento de fase cuyo ángulo de fase resulta positivo en el caso de un primer sentido de dirección o de rotación del transmisor incremental, y que resulta negativo en el caso de un segundo sentido de dirección o de rotación opuesto del transmisor incremental. Conectado a continuación del transmisor incremental se encuentra un convertidor, al cual se le pueden suministrar las señales de los canales del transmisor incremental, y mediante dicho convertidor se pueden emitir señales a un primer y a un segundo canal del convertidor, que representan un segundo incremento angular o de recorrido. Dicho segundo incremento angular o de recorrido es un múltiple integral predeterminado del primer incremento angular o de recorrido. El desplazamiento de fase entre el primer y el segundo canal del convertidor corresponde al desplazamiento de fase entre el primer y el segundo canal del transmisor incremental. El transmisor incremental puede estar conectado, por ejemplo, a un motor que acciona una puerta levadiza o corredera, para detectar la posición de la puerta. El transmisor incremental se conforma preferentemente como un codificador rotativo, dado que la posición del motor se puede detectar, de esta manera, de una manera particularmente simple y precisa. En este caso, el transmisor incremental suministra a sus dos canales un incremento angular. Mediante la posición de fase de ambos canales del transmisor incremental, se pueden determinar el sentido de rotación del motor y, de esta manera, el sentido de desplazamiento de la puerta levadiza. Las señales del transmisor incremental y del convertidor pueden ser continuas. Sin embargo, dichas señales son preferentemente binarias, de manera tal que se simplifique su procesamiento mediante una técnica computacional o una lógica binaria. El ángulo de fase asciende preferentemente a +90° ó -90°. En principio, puede existir cada valor de los intervalos 0 < ángulo de fase < 180° y -180° < ángulo de fase < 0, para identificar el sentido de rotación. Sin embargo, un ángulo de fase de 90° ó -90° es el único caso simétrico pa ra ambos sentidos de rotación, que simplifica considerablemente el procesamiento en el convertidor. El segundo incremento angular o de recorrido presenta preferentemente el doble de tamaño que el primer incremento angular o de recorrido, dado que de manera particularmente frecuente se requiere una bisección de la resolución. Sin embargo, también se pueden realizar sin problemas otras proporciones de división integrales. En una forma de ejecución preferida, el convertidor comprende un microprocesador. En particular, cuando se utilizan señales binarias, resulta apropiado un microprocesador para la conversión programada de la resolución del transmisor incremental. De esta manera, la conversión resulta por lo general... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para la detección de una posición de una unidad motriz, en la cual se puede detectar la posición mediante un transmisor incremental (1) con un primer nivel de precisión descrito mediante un primer incremento angular o de recorrido, y que se puede suministrar para un convertidor (5), mediante el cual el primer nivel de precisión de la detección de la posición se puede reducir a un segundo nivel de precisión descrito mediante un segundo incremento angular o de recorrido, caracterizado porque en el convertidor (5) se implementa un autómata de estado finito, y porque dicho autómata de estado finito puede detectar el estado actual de todas las señales y el estado previo de, al menos, una de las señales de los canales del transmisor incremental (AIN, BIN) y/o de los canales del convertidor (AOUT, BOUT), y en correspondencia con las variaciones de estado que se pueden identificar de esta manera, se puede modificar el estado de los canales del convertidor (AOUT, BOUT), porque las variaciones de estado se pueden clasificar como legales cuando cumplen con los criterios de un código Gray, y se pueden clasificar como ilegales cuando no cumplen con dichos criterios, y porque mediante una variación ilegal del estado se puede iniciar un procedimiento de detección de errores. 2. Dispositivo de acuerdo con la reivindicación 1, caracterizado porque se pueden emitir señales desde el transmisor incremental (1) a un primer y a un segundo canal del transmisor incremental (AIN, BIN), y dichas señales representan el respectivo primer incremento angular o de recorrido predeterminado que recorre el transmisor incremental (1), en donde las señales del segundo canal del transmisor incremental (BIN), en comparación con las señales del primer canal del transmisor incremental (AIN) que presentan la misma forma de señal, presentan un desplazamiento de fase cuyo ángulo de fase resulta positivo en el caso de un primer sentido de dirección o de rotación del transmisor incremental (1), y que resulta negativo en el caso de un segundo sentido de dirección o de rotación opuesto del transmisor incremental (1), en donde el convertidor (5) se encuentra conectado a continuación del transmisor incremental (1), y las señales de los canales del transmisor incremental (AIN, BIN) se pueden suministrar para el convertidor (5), y mediante dicho convertidor (5) se pueden emitir señales a un primer y a un segundo canal del convertidor (AOUT, BOUT), que representan el segundo incremento angular o de recorrido, que se trata de un múltiple integral predeterminado del primer incremento angular o de recorrido, en donde el desplazamiento de fase entre el primer y el segundo canal del convertidor (AOUT, BOUT) corresponde al desplazamiento de fase entre el primer y el segundo canal del transmisor incremental (AIN, BIN). 3. Dispositivo de acuerdo con una de las reivindicaciones 1 ó 2, caracterizado porque el transmisor incremental (1) se conforma como un codificador rotativo. 4. Dispositivo de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque todas las señales son binarias. 5. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el ángulo de fase asciende a +90° ó -90°. 6. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el segundo incremento angular o de recorrido presenta el doble de tamaño que el primer incremento angular o de recorrido. 7. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el convertidor (5) comprende un microprocesador. 8. Dispositivo de acuerdo con la reivindicación 7, caracterizado porque el microprocesador se conforma como un microcontrolador. 9. Dispositivo de acuerdo con la reivindicación 7 u 8, caracterizado porque el microprocesador se puede establecer en un estado definido mediante un controlador de secuencia, y porque dicho controlador de secuencia se puede emplear o reiniciar mediante el autómata de estado finito. 10. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el estado previo de, al menos, una de las señales de los canales del transmisor incremental (AIN, BIN) y/o de los canales del convertidor (AOUT, BOUT), se puede codificar mediante un salto a uno de los, al menos dos, bucles para una ejecución de programa provistos en el autómata de estado finito, y mediante una variación de estado se puede modificar el estado de los canales del convertidor (AOUT, BOUT) en relación con el respectivo bucle que se recorre. 11. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en el autómata de estado finito se proporciona, al menos, una tabla de consulta. 12. Dispositivo de acuerdo con una de las reivindicaciones precedentes, caracterizado porque la unidad motriz es un motor para una puerta accionada mediante motor. 7 E07116914 25-10-2011 13. Método para la detección de una posición de una unidad motriz, en el cual se emiten señales desde un transmisor incremental (1) a un primer o a un segundo canal del transmisor incremental (AIN, BIN), en relación con la posición o con una variación de la posición de la puerta, y dichas señales representan un primer incremento angular o de recorrido respectivamente predeterminado, que es recorrido por el transmisor incremental (1), en donde las señales del segundo canal del transmisor incremental (BIN), en comparación con las señales del primer canal del transmisor incremental (AIN) que presentan la misma forma de señal, presentan un desplazamiento de fase cuyo ángulo de fase resulta positivo en el caso de un primer sentido de dirección o de rotación del transmisor incremental (1), y que resulta negativo en el caso de un segundo sentido de dirección o de rotación opuesto del transmisor incremental (1), en donde el convertidor (5) se encuentra conectado a continuación del transmisor incremental (1), y las señales de los canales del transmisor incremental (AIN, BIN) se suministran para el convertidor (5), y mediante dicho convertidor (5) se emiten señales a un primer y a un segundo canal del convertidor (AOUT, BOUT), que representan un segundo incremento angular o de recorrido, que se trata de un múltiple integral predeterminado del primer incremento angular o de recorrido, en donde el desplazamiento de fase entre el primer y el segundo canal del convertidor (AOUT, BOUT) corresponde al desplazamiento de fase entre el primer y el segundo canal del transmisor incremental (AIN, BIN), caracterizado porque mediante un autómata de estado finito implementado en el convertidor (5) se detecta el estado actual de todas las señales y el estado previo de, al menos, una de las señales de los canales del transmisor incremental (AIN, BIN) y/o de los canales del convertidor (AOUT, BOUT), y en correspondencia con las variaciones de estado que se pueden identificar de esta manera, se modifica opcionalmente el estado de los canales del convertidor (AOUT, BOUT), porque las variaciones de estado son clasificadas por el autómata de estado finito como legales cuando cumplen con los criterios de un código Gray, y como ilegales cuando no cumplen con dichos criterios, y porque ante variaciones ilegales de estado, el autómata de estado finito inicia un procedimiento de detección de errores. 14. Dispositivo de acuerdo con la reivindicación 13, caracterizado porque el estado previo de, al menos, una de las señales de los canales del transmisor incremental (AIN, BIN) y/o de los canales del convertidor (AOUT, BOUT), se codifica mediante un salto a uno de los, al menos dos, bucles para una ejecución de programa provistos en el autómata de estado finito, y mediante una variación de estado se modifica o se mantiene el estado de los canales del convertidor (AOUT, BOUT) en relación con el respectivo bucle que se recorre. 8 E07116914 25-10-2011 9 E07116914 25-10-2011 E07116914 25-10-2011
Patentes similares o relacionadas:
SISTEMA DE ESCALA Y CABEZA DE LECTURA, del 30 de Mayo de 2011, de RENISHAW PLC: Un método para calibrar un aparato de medición de escala, cuyo aparato de escala comprende una escala que tiene marcas de escala dispuestas […]
Sistema y proceso para determinar desplazamientos de instrumentos de medición, del 10 de Junio de 2020, de PSC Engineering S.r.l: Sistema para determinar y restar desplazamientos (δ) de instrumentos de medición e instrumentaciones para aplicaciones navales para estabilizar […]
Método de estimación de fase y aparato para el mismo, del 20 de Mayo de 2020, de Novanta Corporation: Aparato para estimación de fase mediante el procesamiento de señales de sensor desde un conjunto de sensores , transportando las señales de sensor colectivamente una fase […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende:
- un soporte de división , sobre el que está dispuesta la división de la medición ,
- una […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta:
- una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste ,
- un dispositivo […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Método de comprobación para un dispositivo optoelectrónico de medida, y dispositivo, del 16 de Octubre de 2019, de FAGOR AUTOMATION S.COOP: Método de comprobación para un dispositivo optoelectrónico de medida, comprendiendo el dispositivo una regla graduada con una pluralidad de marcas distribuidas […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 SISTEMA DE ESCALA Y CABEZA DE LECTURA, del 30 de Mayo de 2011, de RENISHAW PLC: Un método para calibrar un aparato de medición de escala, cuyo aparato de escala comprende una escala que tiene marcas de escala dispuestas […]
SISTEMA DE ESCALA Y CABEZA DE LECTURA, del 30 de Mayo de 2011, de RENISHAW PLC: Un método para calibrar un aparato de medición de escala, cuyo aparato de escala comprende una escala que tiene marcas de escala dispuestas […]