DISPOSITIVO PARA EL MECANIZADO EN 3D ALTAMENTE DINÁMICO DE UNA PIEZA CON UN RAYO LÁSER.
Dispositivo para el mecanizado 3D altamente dinámico de una pieza con un rayo láser,
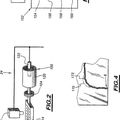
compuesto de un robot de brazo articulado con un armazón del robot (1) y un brazo articulado (2), cuyo extremo estacionario está fijado en el armazón del robot (1) y en cuyo extremo libre está presente una unidad óptica de mecanizado (3) que define un eje óptico (4), así como un cable de fibras ópticas (5) que está en conexión con el extremo estacionario del brazo articulado (2) para poder acoplar un rayo láser (11) con un eje del rayo (10) en el brazo articulado (2), en el que el cable de fibras ópticas (5) está en conexión con el extremo estacionario del brazo articulado (2) indirectamente a través de un grupo constructivo de alineamiento (6) y el grupo constructivo de alineamiento (6) comprende una unidad óptica de colimación (13) y al menos dos espejos de alineamiento (12.1, 12.2) que se pueden pivotar respectivamente al menos alrededor de un eje de rotación y pueden desplazarse al menos a lo largo de un eje de traslación, en el que los ejes de rotación y los ejes de translación se encuentran en ángulo recto, de forma que el eje del rayo (10) puede hacerse coincidir con el eje óptico (4)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09175601.
Solicitante: JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: KONRAD-ZUSE-STRASSE 6 07745 JENA ALEMANIA.
Inventor/es: NITTNER, MICHAEL, DORING,THOMAS, Jancsó,Alex, Bergmann,Jean Pierre, Patschger,Andreas.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- B23K26/08L2B
- B25J19/00E2L
Clasificación PCT:
- B23K26/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Dispositivos que tiene un movimiento relativo entre el haz de rayos y la pieza.
- B25J19/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2364025_T3.pdf
Fragmento de la descripción:
La invención se refiere a un dispositivo en el que un rayo láser transmitido a través de un cable de fibras ópticas se conduce desde un brazo articulado de un robot a una pieza que se va a mecanizar.
El mecanizado tridimensional de componentes (a continuación denominados como piezas) gana importancia en la fabricación, en particular en la soldadura de los componentes cercanos al contorno final o en el afilado y recorte de componentes después de un proceso de conformación.
En particular, si las superficies o contornos de la pieza que se ha de mecanizar en este caso con un rayo láser no se sitúan en un plano (a continuación denominados como contornos 3D), el uso de robots de brazo articulado ofrece una elevada libertad de configuración con menores costes de inversión y una exactitud de fabricación aceptable debido a la programabilidad libre en su desarrollo del movimiento.
El mecanizado de contornos 3D de una pieza mediante un robot con brazo articulado y rayo láser se realiza en el rango de potencia sobre 1 kW en primer plano por el láser de estado sólido (YAG, diodo y láser de fibra). Los rayos láser de este tipo de láser pueden conducirse ventajosamente a través de un cable de fibras ópticas, compuesto de una a varias fibras de fibra óptica, también sobre varios metros, por lo que de manera evidente se abre la posibilidad de conducir externamente en el brazo del robot el rayo láser a través de un cable de fibras ópticas hasta la mano del robot en la que está presente una unidad óptica de mecanizado para la focalización del rayo láser sobre la pieza.
Independientemente de si la radiación láser que llega de una fuente láser se conduce a través de sólo una fibra óptica o una pluralidad de fibras de fibra óptica reunidas en el cable de fibras ópticas, se debe entender a continuación como un rayo láser con un eje del rayo.
Por el documento de patente alemana DE 43 35 367 C2 se conoce una mano de robot para el mecanizado 3D de piezas. En un eje de la mano, que representa el cuarto eje de un robot de cinco ejes, debe estar presente una conexión para un enchufe presente en el cable de fibras ópticas. La conexión debe estar realizada como una conexión enchufable o con rosca.
Para proteger el cable de fibras ópticas frente a una sobrecarga mecánica debe estar protegido, por ejemplo, por un revestimiento espiral. En el enchufe debe estar integrada una disposición óptica de lentes con la que se colima de forma conocida el rayo láser. Se indica que la disposición óptica de lentes para la colimación también puede ser un grupo constructivo separado dispuesto fuera de la conexión enchufable en el lado de las fibras, es decir, fuera del enchufe.
El especialista tiene claro que en un acoplamiento semejante del rayo láser en la mano de un robot no coinciden el eje del rayo láser, que se conduce a través de las fibras de fibra óptica del cable de fibras ópticas, y el eje óptico de la unidad óptica de mecanizado de la mano del robot, sino que están decalados y ladeados uno respecto al otro en función de las tolerancias de montaje de la conexión enchufable.
No obstante, ya que el rayo láser sólo recorre un recorrido proporcionalmente corto dentro del brazo del robot, es decir, el camino de la radiación entre el final de la fibra y la unidad óptica de mecanizado es corto, el punto de incidencia del eje del rayo del rayo láser sobre la unidad óptica de mecanizado está todavía suficientemente cerca del punto de intersección del eje óptico, de forma que no se produce un sombreado del rayo láser en este camino del rayo en la mano del robot.
No obstante, es desventajoso en este tipo del suministro del rayo láser hacia la unidad óptica de mecanizado, a través de la que se focaliza el rayo láser sobre la pieza, que el cable de fibras ópticas se cargue permanentemente mecánicamente siguiendo los movimientos del brazo del robot, también cuando no deba seguir los movimientos altamente dinámicos del eje de la mano. Mediante el revestimiento se debe amortiguar esta carga, no obstante, el revestimiento también limita la movilidad de las fibras de las fibras ópticas.
En general las fibras de fibra óptica no deben curvarse con un radio de curvatura menor de 150 mm, por lo que al partir de piezas fuertemente contorneadas con la mano del robot se puede producir un deterioro de las fibras por doblado. Además, el cable de fibras ópticas presenta una elevada sensibilidad frente a contragolpes incontrolados en movimientos con dinámica elevada.
En el caso del deterioro de las fibras de fibra óptica, en general se debe sustituir el cable de fibras ópticas lo que provoca gastos y un tiempo de inactividad. Aquí se debe atender a que la distancia entre el lugar de mecanizado y la fuente láser puede ser de hasta varios metros, por ejemplo, 50 m, de forma que la sustitución del cable de fibras ópticas requiere por ello mucho tiempo, aun cuando éste esté provisto de un cierre de acoplamiento rápido.
En el documento de patente europea EP 1 579 962 B1 se conoce un robot para la realización de trabajos industriales mediante rayo láser, en el que el rayo láser se conduce a través de una fibra óptica dispuesta en el interior del brazo articulado del robot.
Un guiado integrado semejante de las fibras de fibra óptica no es apropiado debido a la sensibilidad y el pequeño radio de curvatura (100 – 200 mm) para robots altamente dinámicos.
En ambas soluciones mencionadas del estado de la técnica, el cable de fibras ópticas se mueve junto al brazo del robot y por consiguiente se carga dinámicamente lo que reduce su vida útil. Representa el miembro más débil en la trayectoria de los rayos y es válido como pieza de desgaste.
La fibras de fibra óptica pueden servir para el transporte de un rayo láser alimentado o también pueden trabajar por si mismas como láser, se habla de láser de fibra.
Un láser de fibra se compone de una fibra activa, por ejemplo, de una fibra de vidrio dotada con iterbio o erbio, que a través de una conexión por adherencia de materiales está conectada con una fibra de transporte. Ya que la longitud de la fibra activa está limitada debido a la aparición de efectos secundarios indeseados, la longitud global del cable de fibras ópticas se determina básicamente por la elección de la longitud de la fibra de transporte, para conducir el rayo láser al lugar del acoplamiento en una trayectoria de los rayos o a su lugar de acción. La fibra activa y la fibra de transporte representan una estructura casi monolítica, de forma que en el caso de un deterioro de la fibra de transporte y el recambio subsiguiente de la fibra de transporte se debe renovar a fondo la conexión por adherencia de materiales para la fibra activa. Para evitar una carga mecánica de la fibra de transporte se conecta ésta en la práctica con una fibra de proceso, y el movimiento del cable de fibras ópticas que se forma entonces a partir de las secciones de fibra activa, fibra de transporte y fibra de proceso, se limita a la zona de la fibra de proceso.
La fibra de proceso es una fibra confeccionada que se puede cambiar de forma sencilla a través de un acoplamiento de fibra – fibra que puede ser una conexión enchufable o con rosca. No obstante, el acoplamiento fibra – fibra provoca un empeoramiento considerable de la calidad del rayo, que está unido con un aumento también del diámetro del rayo. Esto se explica mediante un ejemplo:
La fibra de transporte tiene, por ejemplo, un diámetro de 50 μm y debido a errores y tolerancias de alineamiento inevitables se acopla en el acoplamiento fibra – fibra en una fibra de proceso con diámetro mayor, por ejemplo, de 100 μm. Con la duplicación del diámetro se produce una densidad del rayo cuatro veces menor a través de la sección transversal del rayo al incidir sobre la pieza, lo que provoca una reducción de la velocidad de mecanizado y por consiguiente aumento del tiempo de ciclo. La eficiencia global del proceso de mecanizado disminuye.
Por ello sería deseable si se pudiese prescindir del acoplamiento de una fibra de proceso.
Por el documento US-A-5 034 618, así como por el documento EP 0 440 002 B2 se conoce un robot de soldadura, en el que un rayo láser se guía dentro de un brazo del robot a través de una serie de espejos internos hasta un cabezal que focaliza el rayo láser. En este último documento no se hacen declaraciones de cómo llega el rayo láser de la fuente láser a un punto... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para el mecanizado 3D altamente dinámico de una pieza con un rayo láser, compuesto de un robot de brazo articulado con un armazón del robot (1) y un brazo articulado (2), cuyo extremo estacionario está fijado en el armazón del robot (1) y en cuyo extremo libre está presente una unidad óptica de mecanizado (3) que define un eje óptico 5 (4), así como un cable de fibras ópticas (5) que está en conexión con el extremo estacionario del brazo articulado (2) para poder acoplar un rayo láser (11) con un eje del rayo (10) en el brazo articulado (2), en el que el cable de fibras ópticas (5) está en conexión con el extremo estacionario del brazo articulado (2) indirectamente a través de un grupo constructivo de alineamiento (6) y el grupo constructivo de alineamiento (6) comprende una unidad óptica de colimación (13) y al menos dos espejos de alineamiento (12.1, 12.2) que se pueden pivotar respectivamente al menos alrededor de un eje de rotación y pueden desplazarse al menos a lo largo de un eje de traslación, en el que los ejes de rotación y los ejes de translación se encuentran en ángulo recto, de forma que el eje del rayo (10) puede hacerse coincidir con el eje óptico (4).
2. Dispositivo según la reivindicación 1, caracterizado porque la conexión entre el cable de fibras ópticas (5) y el grupo constructivo de alineamiento (6) se realiza a través de un enchufe (7) existente en el cable de fibras ópticas (5) y una base hembra (9) prevista en la carcasa (8) del grupo constructivo de alineamiento (6), que conjuntamente forman un cierre rápido.
3. Dispositivo según la reivindicación 1, caracterizado porque el cable de fibras ópticas (5) está formado a partir de un láser de fibra y una fibra de transporte.
4. Dispositivo según la reivindicación 1, caracterizado porque el grupo constructivo de alineamiento (6) comprende adicionalmente un espejo de redireccionamiento (14) que puede pivotarse alrededor del tercer eje de rotación y puede 20 desplazarse a lo largo del tercer eje de translación.
5. Dispositivo según la reivindicación 1, caracterizado porque las lentes de la unidad óptica de mecanizado (3) y la unidad óptica de colimación (13) pueden moverse respectivamente de forma translatoria unas respecto a otras.
Patentes similares o relacionadas:
 SISTEMA Y PROCEDIMIENTO PARA DESPLAZAR UN PUNTO DE FOCALIZACION DE UNA RADIACION LASER DE POTENCIA, del 15 de Febrero de 2010, de LE CONTROLE INDUSTRIEL: Sistema para desplazar un punto de focalización de una radiación láser de potencia a lo largo de una trayectoria presenta en la superficie […]
SISTEMA Y PROCEDIMIENTO PARA DESPLAZAR UN PUNTO DE FOCALIZACION DE UNA RADIACION LASER DE POTENCIA, del 15 de Febrero de 2010, de LE CONTROLE INDUSTRIEL: Sistema para desplazar un punto de focalización de una radiación láser de potencia a lo largo de una trayectoria presenta en la superficie […]
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]