DISPOSITIVO PARA LA MANIPULACION DE PIEZAS Y MANIPULADOR INDUSTRIAL DOTADO DE DICHO DISPOSITIVO.
Dispositivo (1 ) para la manipulación de piezas y manipulador (R)industrial dotado de dicho dispositivo,
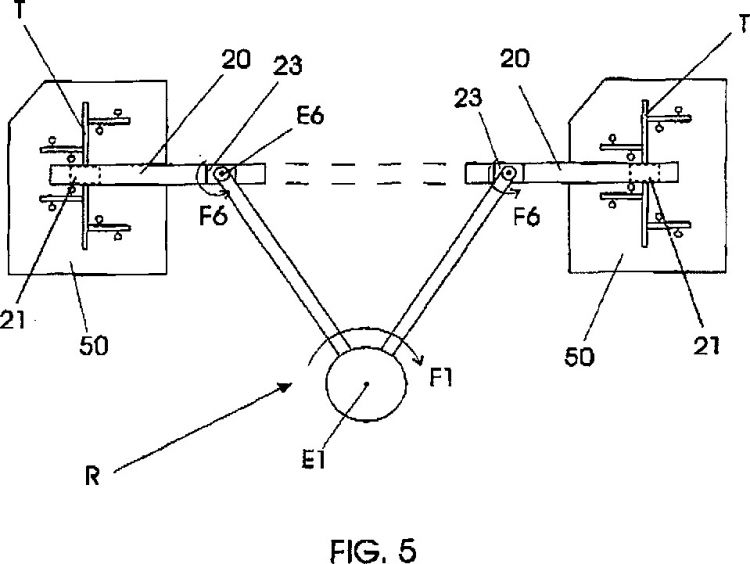
consistente en que el dispositivo (1 ) está destinado a acoplarse a un manipulador industrial (R) con un elemento final (E6), y comprende un brazo rígido(10) vinculado al elemento final (E6) del manipulador (R), un soporte (11 ) montado móvil sobre el brazo (10) y que 10 lleva acoplado de manera rígida un elemento de sujeción (T) de las piezas amanipular, y medios para accionar en movimiento el soporte (11 )respecto al brazo (10). En una realización, el brazo es solidarioen rotación al elemento final (E6) del manipulador y el soportees giratorio respecto al brazo. El manipulador (R), con una cadena cinemática entre una base y un elemento final (E6), tiene un dispositivo como el descrito vinculado a dicho elemento final (E6).La invención permite tiempos de ciclo reducidos, de modo relativamente sencillo y seguro
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2005/000388.
Solicitante: ASEA BROWN BOVERI S.A..
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: CASANELLES MOIX,RAMON, CORTES GRAU,FRANCISCO.
Fecha de Publicación: .
Fecha Concesión Europea: 27 de Enero de 2010.
Clasificación Internacional de Patentes:
- B25J9/04B2
- B25J9/04D
Clasificación PCT:
- B23Q7/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › por medio de pinzas.
- B25J18/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Brazos.
- B25J9/04 B25J […] › B25J 9/00 Manipuladores de control programado. › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
- B25J9/10 B25J 9/00 […] › caracterizado por los medios para regular la posición de los elementos del manipulador.
Fragmento de la descripción:
Dispositivo para la manipulación de piezas y manipulador industrial dotado de dicho dispositivo.
La presente invención se refiere a un dispositivo usado para manipular piezas, por ejemplo, para la carga y descarga de piezas en una línea de prensas. El dispositivo está diseñado para acoplarlo a un manipulador industrial, como, por ejemplo, un robot articulado, que presenta una cadena cinemática entre una base y un elemento terminal.
Antecedentes de la invención
Actualmente, se conoce el uso de diversos tipos de manipuladores industriales en un amplio abanico de aplicaciones.
Por ejemplo, es habitual el uso de robots y otros manipuladores en líneas de prensas usadas para fabricar piezas de carrocería de vehículos: los manipuladores se ocupan de cargar y descargar las piezas entre una prensa y otra, un almacén y una prensa, etc.
Un tipo de manipulador que se usa frecuentemente debido a su capacidad para adaptarse a una gran variedad de diferentes movimientos y ciclos es el de los robots articulados, por ejemplo, robots con cuatro o seis grados de libertad; cada grado de libertad corresponde a un movimiento independiente (giro o desplazamiento) que puede realizar una articulación con respecto a la que la precede.
Otro tipo de manipulador usado en líneas de prensas es el de los denominados "Doppins", que consisten generalmente en una estructura acoplada a la prensa y equipada con una guía sobre la que se desplaza verticalmente un carro; el carro está provisto de un sistema de brazos articulados, que se ocupa del movimiento de entrada y salida de la prensa para cargar o descargar las piezas.
En todos los manipuladores, hay un elemento instalado en el extremo libre del sistema, que, en el caso del mantenimiento de prensas, es un elemento de agarre adaptado a las piezas que se van a cargar y descargar; este elemento de agarre se suele denominar "pinza", y puede usar un sistema de agarre tanto mecánico como eléctrico o de vacío, dependiendo de las necesidades concretas del caso.
Puede haber diferentes configuraciones de manipulación entre un puesto y otro de una línea de prensas: por ejemplo, un único manipulador que extrae la pieza de un puesto y la introduce en otro, o bien un par de manipuladores, uno para descargarla de un puesto y otro para cargarla en el siguiente puesto, con o sin la interposición de cintas transportadoras, mecanismos rotatorios, etc.
En todos los casos, en las líneas de prensas, como en la mayoría de las operaciones industriales, conviene minimizar los tiempos de los ciclos; en lo que respecta a los manipuladores, una parte importante del ciclo consiste en la extracción o introducción de la pieza en relación con el área de influencia de la prensa, ya que, durante esta fase, la prensa debe permanecer abierta, y por tanto, inactiva; por consiguiente, conviene extraer e introducir la pieza rápidamente.
A continuación, se explica este problema, a modo de ejemplo, haciendo referencia a un robot articulado que extrae una pieza de una prensa y la introduce en la siguiente.
Para esta operación, existen básicamente dos ciclos que puede realizar un robot articulado de seis ejes, con una pinza acoplada a su sexto eje.
En un ciclo, que se suele denominar ciclo "exterior", el robot extrae de la prensa en primer lugar la pinza que sostiene la pieza siguiendo una trayectoria rectilínea paralela a la línea de prensas, mediante giros combinados alrededor de los primeros tres ejes; en segundo lugar, hace girar la pinza con respecto a los ejes 4º y 6º, para dejarla situada frente a la siguiente prensa; y, por último, introduce la pieza en la prensa siguiendo una trayectoria rectilínea.
La ventaja de este tipo de ciclo es que los tiempos parciales de extracción e introducción son relativamente cortos, debido a que los movimientos son lineales; no obstante, el tiempo de ciclo global es bastante largo.
En un ciclo alternativo, que se suele denominar ciclo "interior", y que se puede observar en la figura 1, el robot mantiene su brazo extendido y, mediante giros simultáneos con respecto a los ejes 1º y 6º, hace que la pinza realice un único movimiento con la pieza, con una trayectoria básicamente horizontal, que pasa entre el eje 6º y la base del robot; no obstante, debido a la rotación alrededor del 6º eje, la pieza gira durante la extracción e introducción en las prensas.
El tiempo de ciclo global es, en este caso, relativamente pequeño, debido al hecho de que el robot realiza un único movimiento; no obstante, los tiempos parciales de extracción e introducción para las piezas son largos, ya que el giro de la pieza hace que una sección de la misma permanezca más tiempo bajo la prensa. Otro inconveniente del giro de la pieza durante la extracción y la introducción en las prensas consiste en que se deben tener en cuenta los obstáculos que suponen las propias columnas de las prensas, que pueden dificultar el giro de la pinza con la pieza.
Para ciertas soluciones convencionales de carga y descarga desde las prensas presentan limitaciones en lo que respecta a la reducción de tiempo de ciclo.
Además, en ambos casos, la pieza está girada 180º cuando pasa de una prensa a otra.
Recientemente, se han propuesto algunos dispositivos o accesorios diseñados para acoplarlos con el 6º eje de un robot articulado, lo cual resuelve parcialmente estos problemas.
En la solicitud de patente europea EP666150A1, se describe un mecanismo que se acopla a la muñeca del robot y desplaza el giro del sexto eje hasta el extremo de una barra rígida. Este mecanismo hace que sea posible mantener la orientación de la pieza al pasar de una prensa a otra, y realiza un movimiento lineal de extracción e introducción; no obstante, el robot se ve forzado a replegarse considerablemente para este movimiento, por lo cual se ralentiza bastante, especialmente si hay mucha distancia entre las prensas. Otro inconveniente de este mecanismo consiste en que, debido al hecho de que no existe la posibilidad de girar alrededor del 6º eje del robot, la barra debe ser bastante larga para entrar en la prensa lateralmente, y esto provoca problemas de peso, rigidez y similares.
Otro dispositivo conocido incluye dos barras articuladas entre sí por sus extremos; una primera barra se acopla por su otro extremo al 6º eje del robot, mientras que el otro extremo de la segunda barra se acopla a la pinza para la pieza que se va a manipular. En la articulación entre las dos barras, hay un motor que hace posible accionar la rotación de la pinza con respecto a la segunda barra.
Este sistema hace que sea posible transferir la pieza con un giro interior, tal como el que se representa en la figura 1, pero con extracción e introducción lineal en las prensas, debido a que la combinación de rotaciones alrededor de los diferentes ejes hace que sea posible girar la pinza que sujeta la pieza, en el sentido opuesto al giro del brazo del robot durante las fases de extracción o introducción, manteniendo así la orientación de la pieza, y realizar un movimiento aproximadamente lineal entre una prensa y otra.
Sin embargo, este sistema es relativamente complejo, ya que conlleva la presencia de dos barras articuladas entre sí, con los consiguientes inconvenientes relativos a la rigidez del conjunto.
Al mismo tiempo, e independientemente de los movimientos del robot, también conviene asegurarse de que la altura de la pinza sea limitada, con el fin de poder solapar parcialmente los movimientos de apertura y de cierre de la prensa con la introducción y la extracción de la pieza; y también resulta conveniente, por motivos de seguridad y ahorro, que la pinza y cualquier otra pieza del manipulador que penetre en el área de influencia de la prensa estén hechos de materiales ligeros y de baja dureza, compatibles con su función, con el fin de minimizar lo más posible cualquier daño que pudiera sufrir la prensa en caso de accidente.
En el sistema descrito con dos barras articuladas, las condiciones de rigidez exigidas hacen que sea difícil reducir la altura del conjunto; además, la articulación con el motor penetra en el área de influencia de la prensa, con el consiguiente riesgo de que se produzcan daños de consideración en caso de accidente.
En los documentos WO-A-0126165 y JP-A-2001030190, se describe un dispositivo para manipular piezas, que comprende un brazo rígido provisto de unos medios de acoplamiento para acoplar el dispositivo para un manipulador industrial, un soporte montado en el brazo rígido de forma...
Reivindicaciones:
1. Dispositivo (1) para manipular piezas, caracterizado porque comprende:
un brazo rígido (10) provisto de unos medios de acoplamiento para acoplar el dispositivo a un manipulador industrial (R), que presenta una cadena cinemática entre una base y un elemento terminal y para permitir que el dispositivo gire integralmente con el elemento terminal del manipulador (R);
un soporte (11) montado en el brazo rígido (10) de forma que pueda girar y diseñado para acoplarlo rígidamente a un elemento de agarre (T) para las piezas que se van a manipular; y
medios de accionamiento para hacer girar el soporte (11) con respecto al brazo rígido (10), comprendiendo dichos medios de accionamiento un motor (12) montado en un extremo del brazo (10), cerca de dichos medios de acoplamiento, y una transmisión a lo largo del brazo (10), en los que dichos medios de acoplamiento están situados entre el soporte (11) y el motor (12).
2. Dispositivo según la reivindicación 1, caracterizado porque comprende unos medios para hacer girar el soporte (11) de forma sincronizada con la rotación del elemento terminal (E6) y en la dirección opuesta, de tal manera que el giro del soporte (11) compensa el giro del elemento terminal (E6) y por la combinación de las dos rotaciones, el elemento de agarre (T) no gira.
3. Dispositivo según una de las reivindicaciones 1 ó 2, caracterizado porque el eje de rotación del soporte (11) con respecto al brazo (10) es paralelo al eje de rotación del elemento terminal del manipulador (R).
4. Dispositivo según la reivindicación 1, caracterizado porque dicha transmisión comprende un mecanismo seleccionado entre una correa dentada, barra o tornillo sinfín.
5. Manipulador industrial (R) que posee una cadena cinemática entre una base y un elemento terminal, caracterizado porque comprende un dispositivo (1) de acuerdo con cualquiera de las reivindicaciones 1 a 4 vinculado a dicho elemento terminal (E6).
6. Manipulador (R) de acuerdo con la reivindicación 5, caracterizado porque comprende un robot articulado de al menos dos ejes (E1, E6).
7. Manipulador (R) de acuerdo con la reivindicación 6, caracterizado porque comprende un robot articulado de cuatro o seis ejes (E1 a E6).
Patentes similares o relacionadas:
 PROCEDIMIENTO Y DISPOSITIVO PARA MANEJAR PIEZAS, del 29 de Julio de 2010, de ABB RESEARCH LTD.: Un método para operar un sistema incluyendo al menos dos robots (R1, R2) para manejar piezas y una unidad de control de robot dispuesta para el control […]
PROCEDIMIENTO Y DISPOSITIVO PARA MANEJAR PIEZAS, del 29 de Julio de 2010, de ABB RESEARCH LTD.: Un método para operar un sistema incluyendo al menos dos robots (R1, R2) para manejar piezas y una unidad de control de robot dispuesta para el control […]
Máquina de mecanizado con dispositivo de carga de piezas de trabajo, del 10 de Junio de 2020, de GEBR. HELLER MASCHINENFABRIK GMBH: Máquina de mecanizado : con un grupo de husillos posicionables giratoriamente o accionables de forma giratoria alrededor de ejes (26, 27, […]
Máquina herramienta, en particular máquina fresadora de husillos múltiples, del 6 de Mayo de 2020, de DECKEL MAHO PFRONTEN GMBH: Máquina herramienta con: - un bastidor de máquina ; - una instalación de fijación de la pieza de trabajo para el empotramiento de una […]
Procedimiento para la preparación de piezas de trabajo y máquina herramienta para la realización del procedimiento, del 22 de Enero de 2020, de STAMA MASCHINENFABRIK GMBH: Procedimiento para la mecanización de piezas de trabajo en una máquina herramienta con un husillo de trabajo desplazable con relación a un dispositivo […]
Dispositivo de procesamiento con una mesa de piezas de trabajo, del 6 de Noviembre de 2019, de HOMAG GmbH: Dispositivo de procesamiento , en particular para el procesamiento de piezas de trabajo de madera, de materiales de trabajo derivados de la madera, de […]
Dispositivo de mecanizado para piezas de trabajo y procedimiento para el mismo, del 4 de Septiembre de 2019, de HOMAG GmbH: Dispositivo de mecanizado para piezas de trabajo, en particular de madera, plástico o similar, con una primera mesa de piezas de trabajo que puede […]
Procedimiento para mecanizar piezas de trabajo en una máquina herramienta así como máquina herramienta para ello, del 21 de Agosto de 2019, de Ezu-Metallwaren GmbH & Co. KG: Procedimiento para el mecanizado, preferiblemente con arranque de virutas, de piezas de trabajo en una máquina herramienta con un husillo […]
 Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]
Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]